Прибор механизирует процесс построения графическим путем точек граничной линии косого сечения тела вращения по форме его меридиональной образующей, а также дает возможность решать обратную задачу - по симметричной кривой, принятой как граничная линия косого сечения тела вращения с неизвестной формой образующей и по принятому углу сечения, определить образующую в меридиональной плоскости. Сечение можно получить в любом месте тела вращения под любым углом к оси тела вращения, большим 0°. Прибор содержит привод, связанный с ним кривошипно-кулисный механизм, укрепленные в поворотной рамке направляющий стержень кулисы и упругую нить, имитирующую след меридиональной плоскости на секущей, ведущую штангу, перпендикулярную направляющему стержню кулисы и жестко соединенную с последней, поворотную зажимную линейку со сменным шаблоном. Контур шаблона соответствует форме меридиональной образующей. С линейкой жестко скреплены параллельные направляющие, представляющие собой ось тела вращения, а рабочее ребро линейки - ее проекцию; направляющие связаны с ведущей штангой.
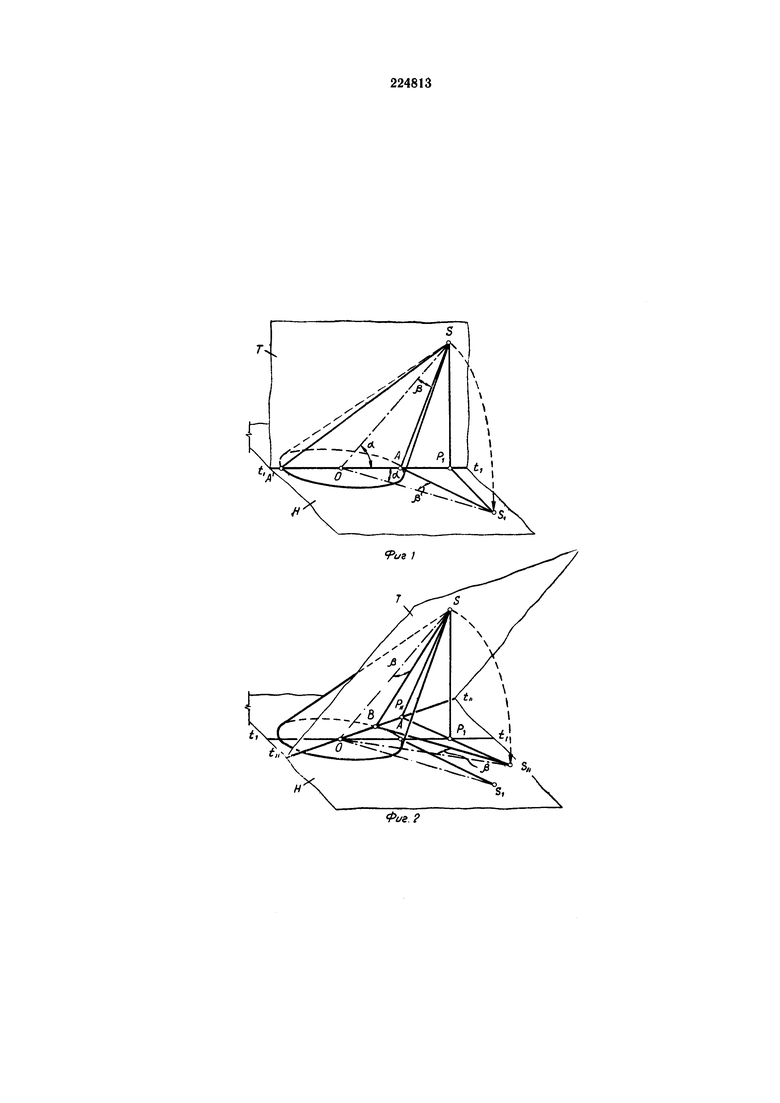
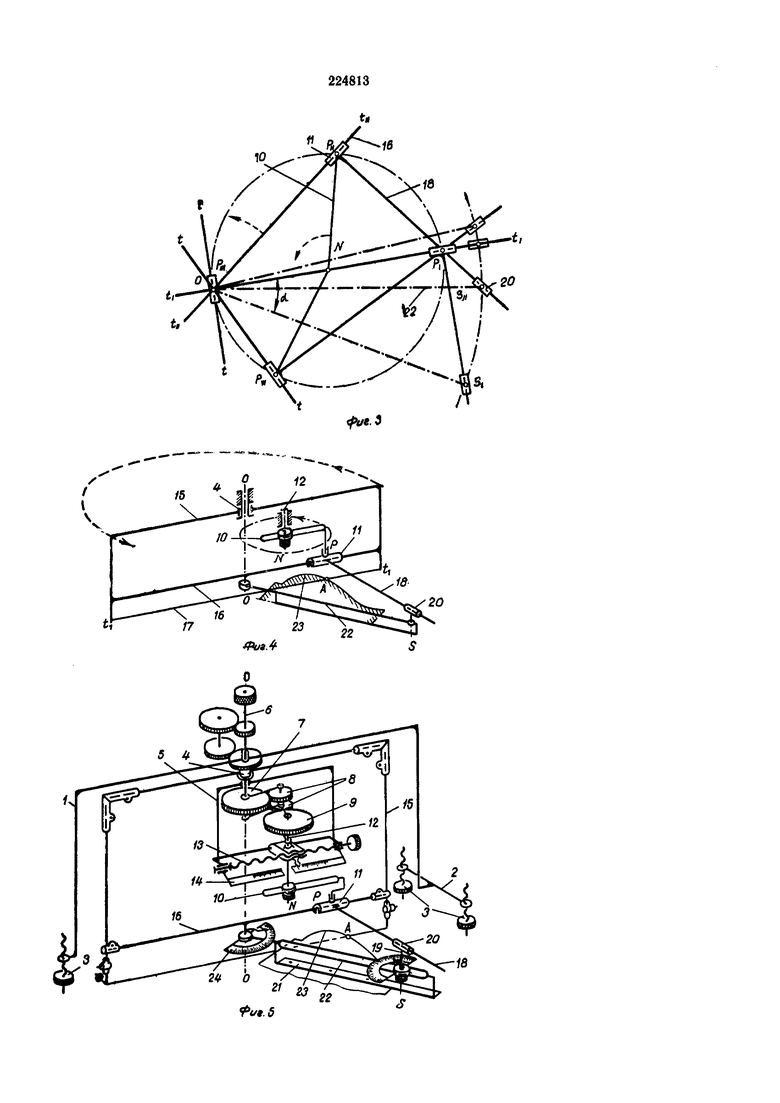
На фиг. 1 и 2 показано построение косого сечения тела вращения, например кругового конуса; на фиг. 3 - кинематическая схема прибора; на фиг. 4 - схема подвижной части прибора; на фиг. 5 - общий вид прибора.
Прибор содержит жесткую раму 1 с траверсой 2 и установочными винтами 3, при помощи которых ось 0-0 прибора устанавливается перпендикулярно плоскости чертежа.
В средней части рамы закреплена цапфа с подшипником 4. На цапфе неподвижно установлена рама 5 привода прибора.
Привод содержит планетарный механизм с шестернями, помещенными на оси 6, на конце которой укреплена ведущая шестерня 7 и ведущая шестерня перебора поворотной рамки. Шестерня передает движение через промежуточные шестерни 8 ведомой шестерне 9.
С приводом связан кривошипно-кулисный механизм, содержащий кривошип 10 и кулису 11. Кривошип 10 вращается вокруг оси 12 и при любой установке должен своим пальцем, ведущим кулису при вращении, проходить через ось 0-0 поворотной рамки. Для регулировки расстояния между осью 0-0 прибора и осью 12 кривошипа служит винт 13, вращающийся в подшипниках рамы 5, и шкала 14 для установки заданного расстояния.
Вокруг оси 0-0 в подшипниках 4 вращается поворотная рамка 15, в нижней части которой укреплен направляющий стержень 16 кулисы 11 и упругая нить 17, имитирующая след меридиональной плоскости Т на секущей.
Перпендикулярно направляющему стержню 16 установлена ведущая штанга 18, жестко соединенная с кулисой 11.
С ведущей штангой 18 посредством скользящей муфты соединена ось 19, на втулке 20 которой закреплена прижимной гайкой поворотная зажимная линейка 21 через жестко скрепленные с ней параллельные направляющие 22, представляющие ось OS тела вращения и качающиеся вокруг оси 0-0. На линейке 21 устанавливают и закрепляют сменный шаблон 23. Контур шаблона соответствует форме меридиональной образующей.
Для определения косого сечения А-A1 (фиг. 1) тела вращения, например кругового конуса ASA′, задают образующую в меридиональной плоскости Т, секущую плоскость H, образующую с осью конуса SO угол α в перпендикулярной H плоскости, угол β - между осью и образующей. Через ось конуса SO проходит в исходном положении меридиональная плоскость, являющаяся также проектирующей на секущей плоскости H. След меридиональной плоскости Т на секущей плоскости H будет прямая t1-t1.
В плоскости Т, кроме оси OS, лежат образующие SA и SA1, проходящие через точки А и A1, принадлежащие сечению, через эти же точки проходит след t1-t1.
В зависимости от соразмерности углов α и β в сечении конуса могут быть получены различные кривые.
В исходном положении из вершины S конуса опускают на плоскость H перпендикуляр SP1, основание P1 которого расположится на следе t1-t1.
Вращением плоскости Т вокруг ее следа t1-t1 совмещают ее с плоскостью H и получают совмещенное положение вершины S1 и оси конуса S1O, образующей S1A, которая сохранит с осью S1O угол β и перпендикуляр S1P1.
Угол α сохранится между осью в совмещенном положении и следом t1-t1, а образующая S1A, пересекаясь со следом t1-t1, определит точку А, принадлежащую кривой сечения.
Сохраняя неизменным положения конуса и секущей плоскости H (фиг. 2), вращают плоскость Т вокруг оси тела вращения. В этом случае плоскость Т образует след t11-t11 на плоскости H.
Образующая конуса SB, лежащая в меридиональной плоскости, встретится со следом t11-t11 в точке В, принадлежащей кривой сечения.
Опуская из вершины S перпендикуляр на след t11-t11, получают основание перпендикуляра в точке Р11. Ось SO, образующая SB и перпендикуляр SP11 лежат в меридиональной плоскости Т.
Далее совмещают плоскость Т с секущей H, вращая вокруг следа t11-t11.
При совмещении вершина S будет перемещаться в плоскости вращения, перпендикулярной оси вращения t11-t11. След плоскости вращения на плоскости H пройдет через точку P1, которая является полюсом для любого поворота меридиональной плоскости вокруг оси тела вращения. След плоскости вращения на меридиональной плоскости проходит через SP11.
Совмещенное положение вершины S в точке S11 на плоскости H располагается на линии, проходящей из Р11 через полюс P1, а место совмещенной вершины определяют проведением дуги из центра О радиусом OS.
Совмещенное положение оси конуса будет OS11, а образующая при сохранении угла β займет положение S11B. Точка В определится как точка пересечения следа t11-t11 и образующей S11B и будет принадлежать кривой сечения.
При любом повороте меридиональной плоскости Т и при ее совмещении с плоскостью H сохранится система и принцип построения, при которой точки О и P1, а также след в исходном положении будут постоянны.
Кривая искомого сечения определяется точками (А, В) пересечения образующей, совмещаемой с плоскостью H, со следами меридиональной плоскости, например t1-t1, t11-t11 и т.д.
Работает прибор следующим образом.
Прибор устанавливают на чертежную плоскость и установочными винтами 3 выравнивают положение его так, чтобы при вращении рамки 15 упругая нить 17 перемещалась на минимальном расстоянии от плоскости чертежа, оставаясь ему параллельной.
Рамку 15 помещают в исходное положение и устанавливают угол сечения α по угломерной шкале 24 и расстояние сечения от вершины S, откладываемое по направляющим 22 от оси 0-0, и закрепляют втулку 20. Палец кривошипа 10 займет положение согласно установленным величинам угла и расстояния OO-Р. По шкале 14 устанавливают центр вращения кривошипа 10, после чего кривошип закрепляют. На линейке 21 закрепляют сменный шаблон 23, имитирующий образующую SO в меридиональной плоскости, совмещая ось шаблона с рабочей кромкой линейки 21, согласовав положение образующей относительно вершины S.
Для получения кривой сечения определяют точки, ей принадлежащие, для этого включают привод и поворачивают на некоторый угол рамку 15, отмечая точку А пересечения шаблона 23 с упругой нитью 17, имитирующей след t1-t1.
При вращении рамки на 360° получают ряд точек, соединив которые, получают полную кривую сечения тела вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПРЕДЕЛЕНИЯ ТОЧЕК ГРАНИЧНЫХ ЛИНИЙСЕЧЕНИЙ, | 1971 |
|
SU311785A1 |
| ПРИБОР ДЛЯ ПОСТРОЕНИЯ ТОЧЕК ГРАНИЧНОЙ ЛИНИИ | 1971 |
|
SU313709A1 |
| ПРИБОР ДЛЯ ПОСТРОЕНИЯ ТОЧЕК ГРАНИЧНЫХ ЛИНИЙСЕЧЕНИЙ, | 1971 |
|
SU306981A1 |
| ПРИБОР ДЛЯ ПОСТРОЕНИЯ ТОЧЕК ГРАНИЧНЫХ ЛИНИЙСЕЧЕНИЙ, | 1968 |
|
SU220512A1 |
| ПРИБОР ДЛЯ ВЫЧЕРЧИВАНИЯ КРИВЫХ | 1971 |
|
SU435147A1 |
| Прибор для получения линий пересечения тел вращения плоскостью | 1974 |
|
SU521815A1 |
| ПРИБОР ДЛЯ ВЫЧЕРЧИВАНИЯ ТЯГОВЫХ КРИВЫХ | 1916 |
|
SU3500A1 |
| Прибор для воспроизведения кривой пересечения геометрических тел | 1990 |
|
SU1743904A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| Эллипсограф | 1984 |
|
SU1158386A1 |
Прибор для построения точек граничной линии косого сочения тела вращения по форме его меридиональной образующей, отличающийся тем, что, с целью механизации процесса, он содержит привод, связанный с ним кривошипно-кулисный механизм, укрепленные в поворотной рамке направляющий стержень кулисы и упругую нить, имитирующую след меридиональной плоскости на секущей, ведущую штангу, перпендикулярную направляющему стержню кулисы и жестко соединенную с последней, поворотную зажимную линейку со сменным шаблоном, контур которого соответствует форме меридиональной образующей, и две жестко скрепленные с линейкой параллельные направляющие, представляющие ось тела вращения и связанные с ведущей штангой.
