Предлагаемый прибор служит для определения точек граничных линий сечений, параллельных оси тел вращения, по его образующей, лежащей в плоскости общего положения относительно оси вращения, если известно из Бзаимоположение, и расстоянию плоскости сечения от оси тела вращения, а также для реп1ения обратной задачи, по симметричной кривой, принятой как граничная линия сечения нараллельного оси тела вращения с неизвестной образующей, определения образующей, лежащей в принимаемой плоскости общего положения относительно оси и принятом расстоянии I сечения.
При помощи прибора можно получать касательные и нормали в точках гиперболы, как кривой сечения конуса любых задаваемых параметров.
Образующая тела вращения в прямом и зеркальном положениях со следом меридиональной плоскости представляется в виде сменного шаблона, закрепляемого в приборе. Положение следа меридиональной плоскости относительно оси и образующей определяется методами начертательной геометрии.
Прибор содержит смонтированные на станине привод, прямолинейную направляющую с ползуном, параллельную ей щтангу, две каретки, установленные на щтанге, трехколенную равнобедренную кулису с изменяемыми
параметрами и .кинематически связанную с каретниками. Штанга имитирует секущую плоскость и несет два соосных продольных винтовых валика.
Трехколенная кулиса закреплена на вертикальном трубчатом валу, переставном в направлении, перпендикулярном оси щтанги, и несущем в части кулису, представляющую меридиональную плоскость.
На каретках в перпендикулярном направлении щтанге укреплены две линейки с продольными прорезями, имитирующие следы меридиональных плоскостей на секущей плоскости, пересекающиеся каждая со своей кулисой, представляющей образующую описанного конуса. Кулисы перемещаются вдоль кареток при помощи винтовых валиков, установленных на каретках.
Кроме того, прибор содерЛСпт верхнюю поворотную рамку, представляющую касательную, расположенную с ней в одной плоскости, и соединенную с рамкой нижнюю раму с двумя параллельными направляющими (верхней и нижней) и параллельной им натянутой струной, имитирующей след образующей на секущей плоскости, являющейся так. касательной. Перпендикулярно к плоскости рам установлена кулиса, представляющая нормаль. Вдоль кулисы нормали перемещается ось качания установочной щтанги, несущей зажимные линейки со сменным шаблоном образующей тела вращения в прямом и зеркальном положениях. С кулисой нормали связана кулиса и гипотенузы.
Верхняя рамка устанавливается по точкам пересечения геометрических осей линеек следов и кулис образующей описанного конуса и имеет направляющую с перемещающейся вдоль нее установочной муфтой. Нижняя направляющая нижней рамы имеет муфту образующей, связанную тросами с установочной муфтой. Установочная штанга скользит в проушине муфты образуюшей. На верхней направляющей нижней рамы перемещается муфта со штырем, входящим в прорезь кулисы нормали. На муфте установлен переставной шарнир, на котором качается кулиса гипотенузы.
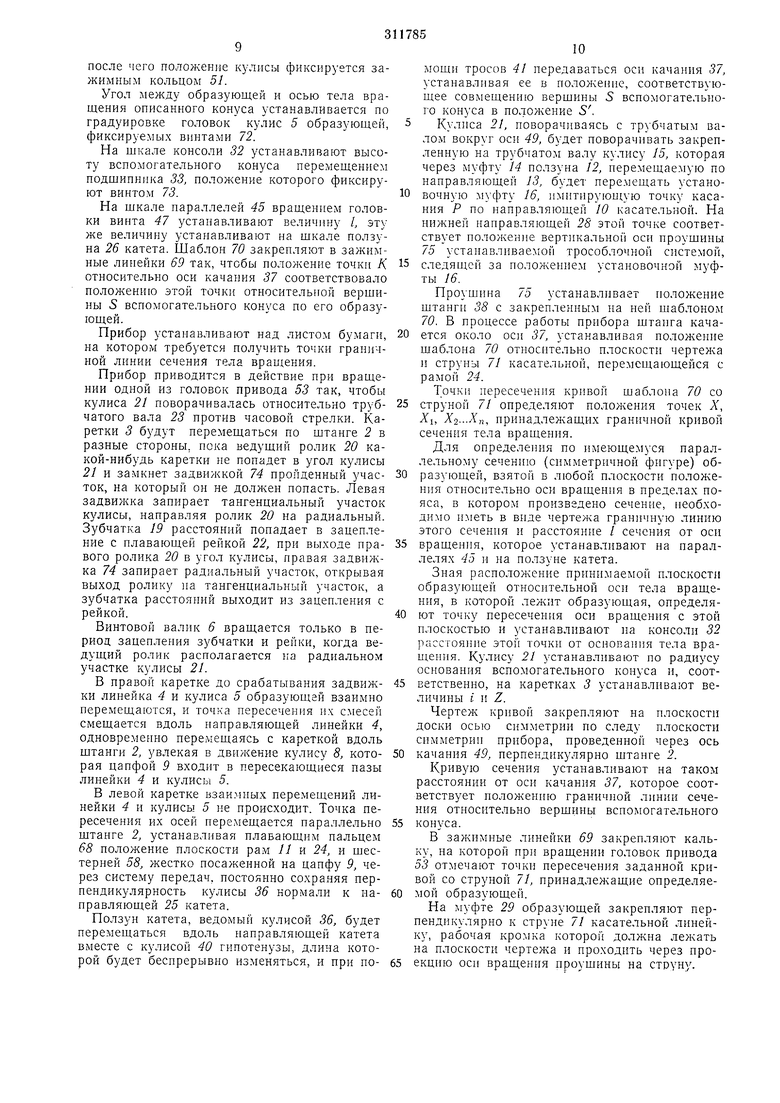
На фиг. 1 изображено пространственное взаимоположение образующей АВ и ее зеркального изображения, расположенные в плоскости Q, пересекающейся с осью вращения OS в точке S, секущей плосткости Н параллельной оси вращения на расстоянии / от нее, а также следа меридиональной плоскости R на плоскости образующей Q.
Показаны следы qq плоскости Q и СР плоскости R на секущей плоскости Н, а таклсе образование вспомогательного конуса, вращением следа PS и меридиональной плоскости на плоскости образующей Q и получение точки Р, как пересечение следов qq и PS.
На фиг. 2 показан метод получения на плоскости чертежа, совмещенного с секущей плоскостью Н, точек Р и PI, принадлежащих граничной линин сечения вспомогательного конуса плоскостью Я.
Показаны контур F основания всномогательного конуса, секущая нлоскость Н представлена линией hh, линиями РО и PiO-положения меридиональной плоскости R.
Для определения полол ения точек Р и PI совмещается меридиональная плоскость с плоскостью Я по стрелкам У и G вращением около точек С и Ci, ось конуса пройдет через точки О и Ol, а образующая конуса, пересекаясь со следами С-С и Ci-С, определит положение точек Р и PI.
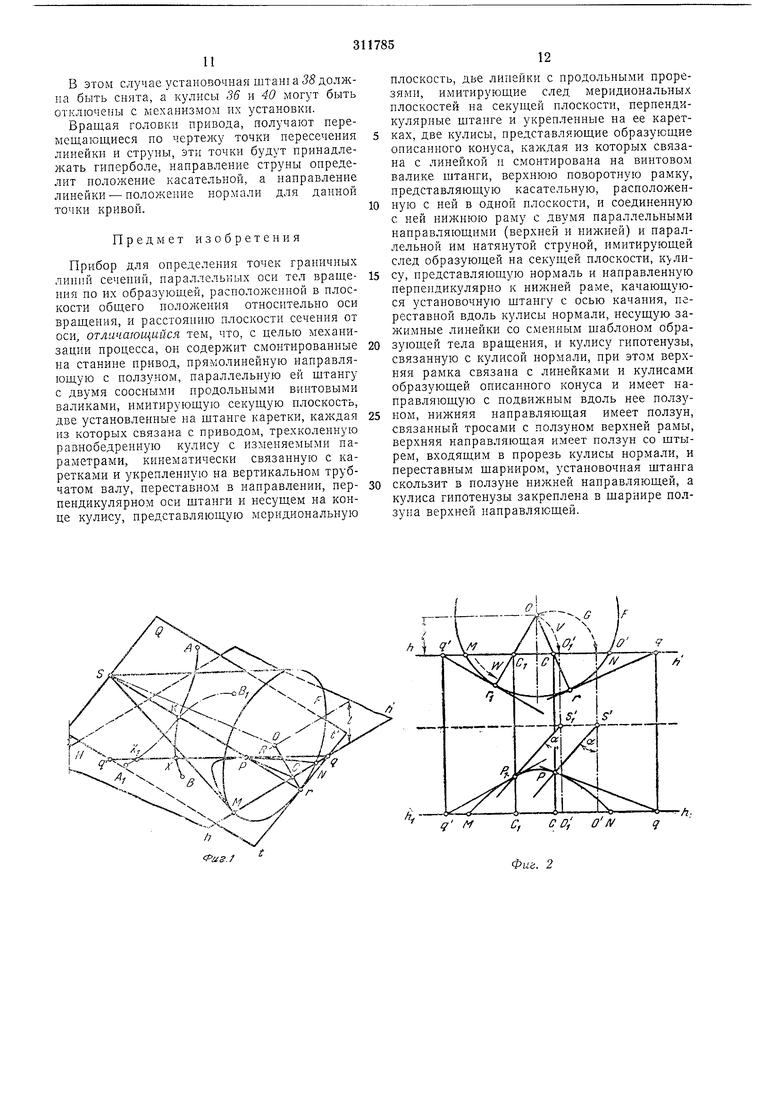
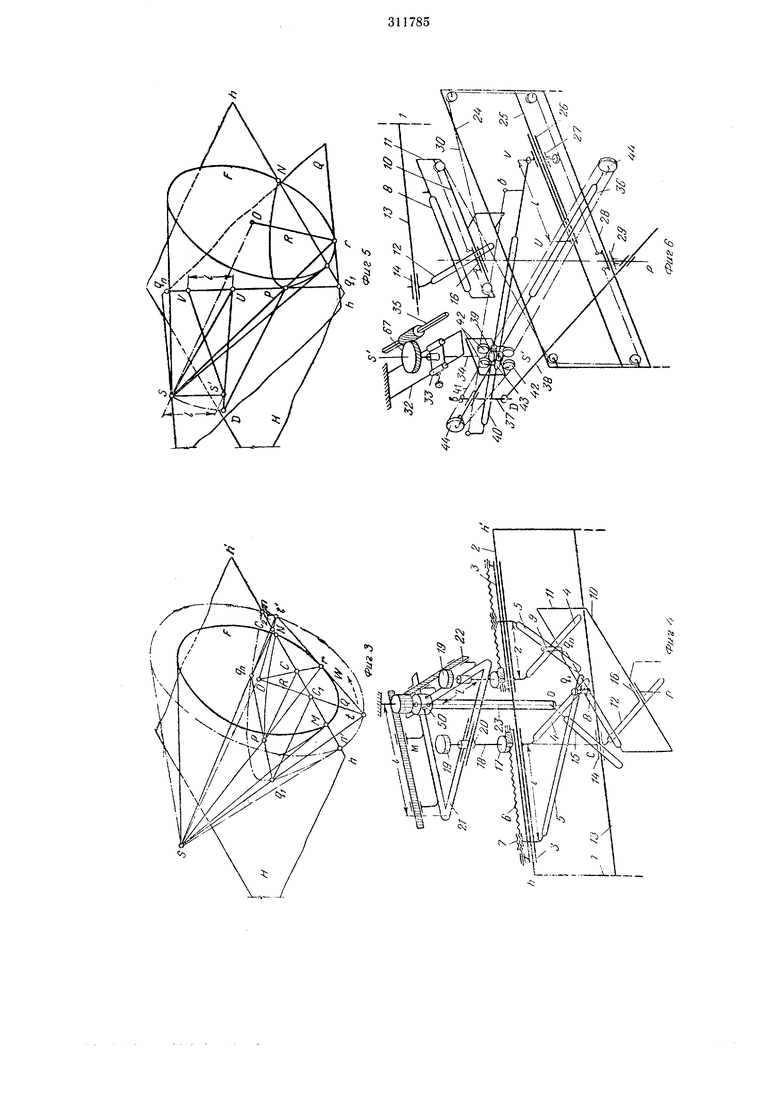
На фиг. 3 изображено взаимоположение гиперболы МРЛ граничной линии сечения вспомогательного конуса F Н следа qqi плоскости Q, принятой в виде равнобедренного треугольника , медианой которого является образующая PS вспомогательного конуса.
След qiqn является касательной к гиперболе MPN в точке Р, направление которой определяется при помощи вспомогательной гиперболы п - граничной линии сечения описанного конуса, который образован вращением треугольной плоскости Q.
На фиг. 4 показана конструктивная схема узла, определяющего нанравленне касательной для любой точки гиперболы граничной линии сечения вспомогательного конуса.
мещения части образующей PS вспомогательного конуса с секущей плоскостью Я вращением образующей PS вокруг касательной , для этого определяется точка D - совмещение вершины S, перемещающейся в плоскости, перпендикулярной касательной qiqn и расноложенной на расстоянии от нее. определяемом из нрямоугольного треугольника SSU, в котором катет SS равен расстоянию / сечения от оси, катет SU равен расстоянию от
нроекции 5 вершины 5 до касательной
и гипотенуза SU определяется из построения
прямоугольного треугольника по катетам.
Совмещенное положение образующей PD-
части вспомогательного конуса определяется положением совмещенной верщнны S в точке D.
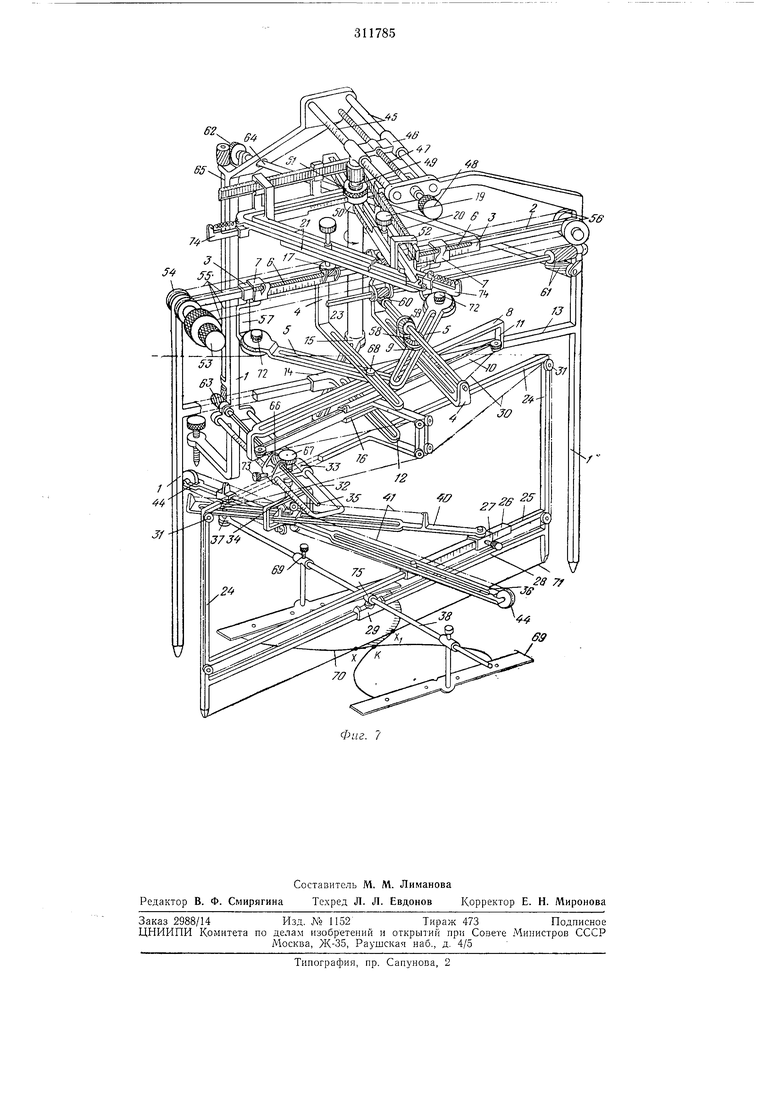
На фиг. 6 дана конструктивная схема узла прибора, отрабатывающего совмещение участка образующей с секущей плоскостью Я; на фиг. 7-кинематическая схема прибора.
На станине / прибора закреплена щтанга 2, имитирующая секущую плоскость hh. Вдоль штанги могут перемещаться две каретки 3 касательной (правая и левая), на которых перпендикулярно щтанге закреплены две линейки 4 с продольными прорезями, имитирующие следы меридиональных плоскостей R на секущей плоскости.
По кареткам 5 ВхТ,оль их осей перемещаются кулисы 5, представляющие образующие Q описанного конуса. На левой каретке кулиса 5 повернута относительной правой симметрично, для того чтобы линейки следов могли быть
максимально сближены при расположении кареток на одной штанге. Кулисы 5 образующих, неремещаясь вместе с кареткой 3 и линейкой 4 направляющей следов, смещаются винтовыми валиками 6, по резьбе которых перемещается головка 7, соединенная с кулисой 5. Изменение расстояния от оси О тела вращения до точек С и Ci должно соответствовать величине перемещения головки относительно линейки 4.
Пересечение геометрических осей линеек 4 и кулис 5 определяет положение точек qi и qn принадлежащих касательной, которую имитируют кулиса 8, качающаяся вокруг цапфы 9,
закрепленной на кулисе 8 и расположенной в неремещающейся точке (/„.
Положение точки касания Р определяется на направляющей 10, параллельной кулисе касательной и жестко связанной с ней, образуя
верхнюю поворотную рамку 11, при помощи ползуна 12 точки касания, перемещающегося вдоль прямолинейной направляющей 13, установленной параллельно щтанге 2. По нанравляющей 13 скользит муфта 14 ползуна 12, устанавливаемая кулисой 15, представляющей меридиональную плоскость.
Ползун 12, неремещаясь вдоль направляющей 13, сохраняя к ней перпендикулярность, устанавливает на направляющей 10 устаноползуна 12, фиксируя положение точки касания Р.
Винтовой валик 6 получает вращение от шестеренки 17 каретки 3. Это шестеренка сидит на одном валике /8 с зубчаткор 19 расстояний, смонтированных на каретках. На валике 18 свободно враш;ается ведущий ролик 20, перемещающийся в пазу трехколенной равнобедренной кулисы 21 с изменяемыми параметрами. Кулиса 21 имитирует проекцию трехугольной плоскости на плоскость, проходящую через основания конусов.
При настройке прибора по левой каретке 5 между осями линейки 4 и кулисы 5 устанавливается расстояние 1, равное расстоянию от оси качания кулисы 21 до наиболее удаленной ее точки радиального участка по оси паза кулисы.
Для правой каретки 3 расстояние Z меладу осями линейки 4 и кулисы 5 должно автоматически устанавливаться в процессе работы прибора в период зацепления зубчатки 19 с плавающей реЙ1;ой 22 и должно быть равно расстоянию между осью качания кулисы 21 и осью валика 18 до выхода ведущего ролика 20 на тангенциальный участок кулисы 21, после чего величина Z будет равна величине i, сохраняясь неизменной до тех пор, пока ролнк 20 будет находится в пазу тангенциального участка кулисы.,
При перемещении левой каретки влево кулиса 21 будет поворачиваться против часовой стрелки, и расстояние i на каретке будет оставаться постоянным до момента входа зубчатки 19 в зацепление с рейкой 22, после чего зубчатка, прокатываясь по рейке, будет передавать вращение на винтовой валик 6, перемещающий через головку 7 кулису 5 образующей.
Передаточные числа зубчаток приняты с таким расчетом, чтобы сохранилось равенство изменяющихся расстояний между осями качания кулисы 21 и валика 18 и между осями линейки 4 и кулисы 5 образующей в период зацепления зубчатки 19 с плавающей рейкой 22 в процессе работы прибора.
Благодаря смещенности реек пр;; пх неподвижности относительно оси качания кулисы 21 при повороте последи ;й будет иметь место набегание или сбегание рейки с зубчатки, что увеличит ее угловую скорость, искажающую установку расстояний i и Z. Для исключения этого явления рей:к 22 приняты плавающими- смещающимися вдоль своих осей и находятся в постоянном зацеплении с неподвижной зубчаткой корпуса, закрепленной на неподвижной оси качания и имеющей одинаковое количество зубьев с зубчаткой 19.
Кулиса 21 укреплена на вертикальном трубчатом валу 23, переставном в направлении, перпендикулярном оси щтанги 2.
На конце вала 23 укреплена в перпендикулярной плоскости к тангенциальному участку кулисы 21 кулиса 15, имитирующая меридиональную плоскость.
Верхняя поворотная рамка // .соединена перемычкой с нижней рамкой 24. Такая связь позвол5;ет плоскости рам поворачиваться относительно станины под уг.лами необходимой величины, не пересекая горизонтальных элементов прибора. Рамы расположены в одной плоскости.
Нижняя рамка состоит из верхней направляющей 25 катета, вдоль которой перемещается ползун 26 с закрепляемым на нем шарниром 27, имитирующим вершину V прямоугольного треугольника SVU, и нижней направляющей 28, предназначенной для установки ноложения точки касания Р, представляемой муфтой 29 образующей, синхронно перемещающейся с установочной муфтой 16 по направляющей.
Взаимосвязь муфт 29 и 16 осуществляется при помощи двух тросов,50, закрепленных на них и перекинутых через блоки 31, которые установлены на рамах //и 24.
На станине закреплена консоль 5.2 установки ноложения проекции 5 на секущую плоскость 5. По консоли может перемещаться и фиксироваться винтом подшипник 33 нормали.
Для установки расстояния проекции вершины S вспомогательного конуса на одной из направляющей консоли 32 нанесена градуировка с началом отсчета от вертикальной плоскости, проходящей через геометрическую ось штанги 2,, имитирующую секущую плоскость hh.
В подшипнике 33 вращается ось 34 нормали с щестерней установки на ее верхнем конце, приводимой во вращение через щестеренку шлицованным валиком 35 нормали.
В нижней части оси посредством жесткой рамки закреплена кулиса 36 нормали, в прорези которой скользит штифт ползуна 26 катета, представляющий основание перпендикуляра и.
Между штифтом ползуна 26 катета, представляюшего точку L/, и шарниром 27, представляющим точку V, устанавливается и фиксируется расстояние, равное задаваемой величине I-расстоянию сечения от оси тела вращения.
Кулиса нормали должна постоянно сохранять перпендикулярность к направляющей 25 катета при перемещении рамы 24 и ее качания около цапфы 9. Это взаимоположение при изменениях углов поворота плоскости рамы 24 обеспечивается щестерней оси нормали, получающей движение через систему передачи от кулисы 8 касательной.
На хвостовике кулисы 36 нормали вдоль ее оси молчет перемещаться ось качания 37, определяющая совмещенные положение вершин конуса 5 в точке D на секущей плоскости. На оси 37 качается установочная щтанга 38, определяющая направление совмещенной вспомогательной образующей, проходящей через проушину муфты 29, образ}ющей имитирующую точку Р.
По трубчатому пальцу 39, ось которого совпадает с осью 34 нормали, своим пазом может перемещаться кулиса 40 гипотенузы, соединенная передним концом в точке V с шарниром 27 гипотенузы.
Для установки положения оси качания 37, имитирующей точку Д длина гипотенузы, определяемая расстоянием SV, должна быть отложена вдоль нормали UD от точки U. Это осуществляется трособлочным устройством, содержащим два троса 41, закрепленных на кулисе гипотенузы в точках а и б. Тросы перетянуты через переводные блоки 42. Верхняя пара блоков установлена на сухаре 43, вращающемся вокруг трубчатого пальца 39, в сухаре скользит кулиса гипотенузы. Сквозь отверстие трубчатого пальца 39 тросы пропущены и перетянуты через блоки 42, закрепленные на кулисе 36 нормали, протянуты вдоль нее, обведены вокруг конечных блоков 44 и концы их закреплены на муфте оси 37 качания в точке б.
На стание закреплены параллели 45, по которым может перемещаться кронштейн 46, устанавливаемый на нужном и регулируемом расстоянии /, которое отсчитывается по градуировке, нанесенной на одном из стержней параллелей, с началом отсчета от вертикальной плоскости, проходящей через геометрическую ось штанги 2. Кронштейн 46 перемещается винтом регулировки 47, вращаемым головкой 48. На кронштейне закреплена ось качания 49 с неподвижно посаженной на ней зубчаткой корпуса.
На оси 49 вращается трубчатый вал 23 кулисы 21 с закрепленными на ней в верхней части опорным элементом ступицы 50.
Трехколенная кулиса 21 составлена из двух раздвижных полукулис, радиальные участки которых входят в пазы ступицы 50, состоящей из двух частей, стягиваемых накатанным зажимным кольцом 51, что позволяет изменять длину радиальных участков, устанавливая по градуировке на них размер радиуса основания вспомогательного конуса.
Тангенциальный участок кулисы 21 состоит из двух наложных друг на друга полуветвей так, что при регулировке размера радиальных участков сохраняется беспрерывность паза, в котором прокатывается ведущий ролик 20 кареток 3.
Для придания полукулисам жесткости их части между собой связаны скобкой-кронштейном 52, в которых перемещаются плавающие рейки 22. Концы радиальных участков полукулис соединены перемычкой.
Перемещение кареток по штанге осуществляется головками привода 53, отдельными для правой и левой каретки. Через ведущие блоки 54, связанные с головками привода, перетянуты тросы 55, закрепленные концами каждый на своей каретке и переведены через конечные блоки 56.
соответствующие расстояния i и Z между осями стоек 57 и осями линеек 4, что производится по градуировке, нанесенной на каретках, с нулем отсчета от оси, которая проходит через ось линеек.
Каретки устанавливают положения точек VS72, принадлежащих касательной, представленной кулисой 8.
В точке (/„, определяемой правой кареткой,
на пересечении линейки 4 и кулисы 5 проходит цапфа 9 кулисы 8. На цапфу неподвижно посажена шестерня 58 угла касательной, с которой в постоянном зацеплении находится ведомая шестерня 59, передающая через шлицованный вал, шестерни 60 на горизонтальный шлицованный вал, шестеренчатые пары 61, 62, 63 и валы 64, 65, 35 вращение на ведущую шестерню 66 установки угла, врашающую шестерню 67 оси 34 нормали, обеспечивающую
перпендикулярность положения кулисы 36 нормали к плоскости рам // и 24.
В исходном положении прибора геометрическая ось плавающего пальца 68, который устанавливается в точке qi касательной, на
нересечении линейки 4 и кулисы 5 левой каретки ось пальца муфты 16, входящего в паз ползуна 12, и ось вращения проушины муфты 29 должны располагаться на общей вертикали.
На установочной штанге 38, имитирующей образующую вспомогательного конуса, закреплены перемещаемые стойки зажимных линеек 69, в которых помещается шаблон 70, изготовленный по прямой и зеркальной образующей. Осью симметрии шаблона является след меридиональной плоскости, перпендикулярной плоскости образующей.
Шаблон 70 устанавливается в соответствии с положением точки К на вспомогательной
образующей относительно вершин конуса S, которая должна расположиться на таком же расстоянии от оси качания 37, поэто.му зажимные линейки 69 можно перемещать вдоль установочной штанги 38 и изменять между ними расстояние в соответствии с размером шаблона, устанавливаемого поверх струны 71 касательной, закрепленной на концах рамы 24 касательной, имитирующей след плоскости на секущей плоскости Н.
Работает прибор следующим образом.
Для определения точек граничной .тинии сечения тела вращения в прибор вводят в виде шаблона задаваемую образующую и параметры, предварительно определяемые методами
начертательной геометрии; радиус основания вспомогательного конуса, его высота, угол между осью тела вращения и образующей описанного конуса, а также положение главной образующей относительно вспомогательной образующей.
Радиус основания вспомогательного конуса устанавливают в приборе, как расстояние геометрической оси тангенциального участка кулисы 21 от оси качания кулисы по шкалам,
после чего положение кулисы фиксируется зажимным кольцом 51.
Угол между образующей и осью тела вращения описанного конуса устанавливается по градуировке головок кулис 5 образующей, фиксируемых винтами 72.
На шкале консоли 32 устанавливают высоту вспомогательного конуса перемещением подшипника 33, положение которого фиксируют винтом 73.
На шкале параллелей 45 вращением головки виита 47 устанавливают величину /, эту же величину устанавливают на шкале ползуна 26 катета. Шаблон 70 закрепляют в зажимные линейки 69 так, чтобы положение точки Л относительно оси качания 37 соответствовало положению этой точки относительной вершины 5 вспомогательного конуса по его образующей.
Прибор устанавливают над листом бумаги, на котором требуется получить точки граничной линии сечения тела вращения.
Прибор приводится в действие при вращении одной из головок привода 53 так, чтобы кулиса 21 поворачивалась относительно трубчатого вала 23 против часовой стрелки. Каретки 3 будут перемещаться по штанге 2 в разные стороны, пока ведущий ролик 20 какой-нибудь каретки не попадет в угол кулисы 21 и замкнет задвижкой 74 пройденный участок, на который он не должен попасть. Левая задвижка запирает тангенциальный участок кулисы, направляя ролик 20 на радиальный. Зубчатка 19 расстояний попадает в зацепление с плавающей рейкой 22, при выходе правого ролика 20 в угол кулисы, правая задвижка 74 запирает радиальный участок, открывая выход ролику на тангенциальный участок, а зубчатка расстояний выходит из зацепления с рейкой.
Винтовой валик 6 вращается только в период зацепления зубчатки и рейки, когда ведущий ролик располагается на радиальном участке кулисы 21.
В правой каретке до срабатывания задвижни линейка 4 и кулиса 5 образующей взаимно перемещаются, и точка пересечения их смесей смещается вдоль направляющей линейки 4, одновременно перемещаясь с кареткой вдоль штанги 2, увлекая в движение кулису 8, которая цапфой 9 входит в пересекающиеся пазы линейки 4 и кулисы 5.
В левой каретке взаимных перемещений линейки 4 и кулисы 5 ие происходит. Точка пересечения их осей перемещается параллельно штанге 2, устанавливая плавающим пальцем 68 положение плоскости рам 11 и 24, и шестерней 58, жестко посаженной на цапфу 9, через систему передач, постоянно сохраняя перпендикулярность кулисы 36 нормали к иаправляющей 25 катета.
Ползун катета, ведомый кулисой 36, будет перемещаться вдоль направляющей катета вместе с кулисой 40 гипотенузы, длина которой будет беспрерывно изменяться, и при помощи тросов 41 передаваться оси качания 37, устанавливая ее в положение, соответствующее совмещению вершины 5 вспомогательного конуса в положение S.
Кулиса 21, поворачиваясь с трубчатым валом вокруг оси 49, будет поворачивать закрепленную на трубчатом валу кулису 15, которая через муфту 14 ползуна 12, перемещаемую по направляющей 13, будет перемещать установочную муфту 16, имитирующую точку касания Р по направляющей Ю касательной. На нижней направляющей 2S этой точке соответствует положение вертикальной оси проушины 75 устанавливаемой трособлочной системой, следящей за положением установочной муфты 16.
Проушина 75 устанавливает положение штанги 38 с закрепленным на пей шаблоном 70. В процессе работы прибора штанга качается около оси 37, устанавливая положение шаблона 70 относительно плоскости чертежа и струны 71 касательной, перемеи ающейся с рамой 24.
Точки пересечения кривой шаблона 70 со струной 71 определяют положения точек А , Xi, Xz.-.X,,, принадлежащих граничной кривой сечения тела вращения.
Для определения ио имеющемуся параллельному сечению (симметричной фигуре) образующей, взятой в любой плоскости полол ения относительно оси вращения в пределах пояса, в котором произведено сечение, необходимо иметь в виде чертежа граничную .тинию этого сечения и расстояние / сечения от оси вращення, которое устанавливают на параллелях 45 и на ползуне катета.
Зная расположение принимаемой плоскости образующей относительной оси тела вращения, в которой образующая, определяют точку пересечения оси вращения с этой плоскостью и устанавливают на консоли 32 расстояние этой точки от основания тела вращения. Кулису 21 устанавливают по радиусу основания вспомогательного конуса и, соответственно, на каретках 3 устанавливают величины i и Z.
Чертеж кривой закрепляют на плоскости доски осью симметрии по следу плоскости симметрии прибора, проведенной через ось качания 49, перпендикулярно штанге 2.
Кривую сечения устанавливают на таком расстоянии от оси качания 37, которое соответствует положениЕо граничной линии сечения относительно вершины вспомогательного конуса.
В зал имные линейки 69 закрепляют кальку, на которой при вращении головок привода 53 отмечают точки пересечения заданной кривой со струной 71, принадлежащие определяемой образующей.
На муфте 29 образующей закрепляют перпендикулярно к струне 7/ касательной линейку, рабочая кромка которой должна на плоскости чертел а и проходить через проекцию оси вращения проушины на . В этом случае установочная штанга З долл:иа быть снята, а кулисы 36 и 40 могут быть отключены с механизмом нх установки. Вращая головки привода, получают перемещающиеся по чертежу точки пересечения линейки и струны, эти точки будут принадле}кать гиперболе, направление струны определит положение касательной, а направление линейки - положение нормали для данной точки кривой. Предмет изобретения Прибор для определения точек граничных линии сечении, параллельных оси тел вращения по их образующей, расположенной в плоскости общего положения относительно оси вращения, и расстояиию плоскости сечения от оси, отличающийся тем, что, с целью механизации процесса, он содержит смонтированные на станине привод, прямолинейную направляющую с ползуном, параллельную ей щтангу с двумя соосными продольными винтовыми валиками, имитирующую секущую плоскость, две установленные на щтанге каретки, каждая из которых связана с приводом, трехколенную равнобедренную кулису с изменяемыми параметрами, кинематически связанную с каретками и укрепленную на вертикальном трубчатом валу, переставном в направлении, перпендикулярном оси щтанги и несущем на конце кулису, представляющую меридиональную
12 плоскость, две линейки с продольными прорезями, имитирурощие след меридиональных плоскостей на секущей плоскости, перпендикулярные щтанге и укрепленные на ее каретках, две кулисы, представляющие образующие описанного конуса, каждая из которых связана с линейкой и смонтирована на винтовом валике штанги, верхнюю поворотную рамку, представляющую касательную, расположенную с ней в одной плоскости, и соединенную с ней нижнюю раму с двумя параллельными направляющими (верхней и нижней) и параллельной им натянутой струной, имитирующей след образующей на секущей плоскости, кулису, представляющую нормаль и направленную перпендикулярно к нижней раме, качающуюся установочную щтангу с осью качания, переставной вдоль кулисы нормали, несущую зажимные линейки со сменным щаблоном образующей тела вращения, и кулису гипотенузы, связанную с кулисой нормали, при этом верхняя рамка связана с линейками и кулисами образующей описанного конуса и имеет направляющую с подвижным вдоль нее ползуном, нижняя направляющая имеет ползун, связанный тросами с ползуном верхней рамы, верхняя направляющая имеет ползун со штырем, входящим в прорезь кулисы нормали, и переставным щарниром, установочная щтанга скользит в ползуне нижней направляющей, а кулиса гипотенузы закреплена в щарнире ползуна верхней направляющей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ ПОСТРОЕНИЯ ТОЧЕК ГРАНИЧНОЙ ЛИНИИ | 1971 |
|
SU313709A1 |
| ПРИБОР ДЛЯ ПОСТРОЕНИЯ ТОЧЕК ГРАНИЧНЫХ ЛИНИЙСЕЧЕНИЙ, | 1971 |
|
SU306981A1 |
| ПРИБОР ДЛЯ ПОСТРОЕНИЯ ТОЧЕК ГРАНИЧНЫХ ЛИНИЙСЕЧЕНИЙ, | 1968 |
|
SU220512A1 |
| ПРИБОР ДЛЯ ПОСТРОЕНИЯ ТОЧЕК ГРАНИЧНОЙ ЛИНИИ КОСОГО СЕЧЕНИЯ ТЕЛА ВРАЩЕНИЯ ПО ФОРМЕ ЕГО МЕРИДИОНАЛЬНОЙ ОБРАЗУЮЩЕЙ | 1966 |
|
SU224813A1 |
| Прибор для вычерчивания кривых | 1990 |
|
SU1729815A1 |
| ПАТЕНТНО-ТЕКНИНЕСКАЯБИБЛИОТЕКА | 1971 |
|
SU303220A1 |
| Прибор для построения кривых | 1990 |
|
SU1719250A1 |
| Прибор Салькова для воспроизведения кривых второго порядка | 1986 |
|
SU1361024A1 |
| Устройство для обработки кольцевого желоба переменного профиля | 1973 |
|
SU515628A1 |
| Станок для обработки кольцевого желоба переменного профиля | 1988 |
|
SU1645108A1 |
fus.f
h V У/У
L J5 Af
f. „
у МС, С dt О /Vq
Фиь. 2
62,
.
В5
