Предлагаемое изобретение относится к механизмам со сложным движением выходных звеньев, применяемым для выполнения технологических операций при обслуживании машин, станков, прессов и другого оборудования. Такие манипуляционные механизмы, имитируя определенные движения человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство для передачи изделий, выполненное в виде комбинированного механизма, содержащего передаточный механизм с выходным звеном, исполнительный механизм с выходными звеньями и губками для захвата изделий, ведущим звеном которого является выходное звено передаточного механизма, и привод (Патент №2191107, опубл. в БИПМ, 2003. - №33 - прототип).
Основной недостаток прототипа заключается в том, что при поворотном движении выходного звена передаточного механизма, которое несет выходные звенья исполнительного механизма, на границах интервалов прямого и обратного ходов возникают мягкие удары, когда при нулевом значении скорости выходного звена ускорение последнего мгновенно возрастает от нуля до конечного значения или мгновенно падает от конечного значения до нуля. В периоде кинематического цикла, т.е. за время одного оборота кривошипа, мягкий удар возникает четыре раза. Мягкие удары негативно сказываются на работе устройства, поскольку приводят к необходимости уменьшения частоты повторения рабочих циклов и соответствующему снижению производительности. Удары также снижают точность работы устройства. Это особенно ощутимо при передаче изделий повышенной массы.
Задачей настоящего изобретения является улучшение динамических характеристик и повышение точности работы комбинированного механизма.
Решение поставленной задачи достигается тем, что в комбинированном механизме со сложным движением выходных звеньев, содержащем передаточный механизм с кинематически связанными между собой ведущим и выходным звеньями, в котором выходное звено подвижно соединено с поворотной направляющей, шарнирно связанной со стойкой, исполнительный механизм с выходными звеньями и губками для захвата изделий, ведущим звеном которого является выходное звено передаточного механизма, и привод, кинематическая связь ведущего и выходного звеньев передаточного механизма содержит промежуточные звенья, выполненные в виде кулисы, совершающей возвратно-поступательные движения, и сопряженного с ней толкателя, при этом кулиса подвижно соединена с ведущим звеном, а толкатель шарнирно связан с выходным звеном механизма.
Кулиса передаточного механизма содержит жестко связанные между собой подвижное основание и рамку, при этом подвижное основание выполнено в виде стержня, смонтированного в неподвижных направляющих, а рамка расположена под прямым углом к продольной оси стержня.
Сопряжение кулисы с толкателем включает две зубчатые рейки, одна из которых закреплена на подвижном основании кулисы, а другая - на толкателе, и два зубчатых колеса для сопряжения с упомянутыми рейками, при этом зубчатые колеса смонтированы на общей оси и жестко связаны между собой.
Зубчатые колеса имеют разные диаметры делительных окружностей, при этом колесо меньшего диаметра сопряжено с рейкой на неподвижном основании кулисы, а колесо большего диаметра - с рейкой на толкателе.
Подвижное соединение кулисы с ведущим звеном передаточного механизма содержит ползун, который смонтирован в рамке кулисы и шарнирно связан с ведущим звеном.
Шарнирная связь толкателя передаточного механизма с выходным звеном последнего содержит палец, жестко закрепленный на конце толкателя.
Выходное звено передаточного механизма выполнено двуплечим, одно из плеч подвижно соединено с поворотной направляющей, с другим плечом шарнирно связаны выходные звенья исполнительного механизма.
Передаточный механизм выполнен в виде рычажно-зубчатого многозвенника, структура кинематической цепи которого удовлетворяет зависимости

где W - степень подвижности механизма, W=1;
n - число подвижных звеньев, n=7;
р5 - число низших кинематических пар, р5=9;
р4 - число высших кинематических пар, р4=2.
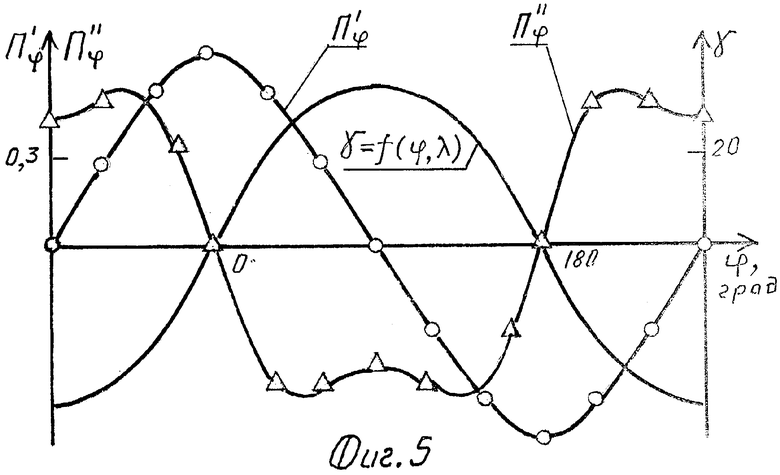
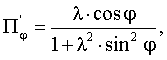
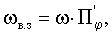
Законы движения выходного звена передаточного механизма соответствуют зависимостям:



где ϕ, γ - текущий угол поворота соответственно ведущего и выходного звена;
γ=f(λ, ϕ) - функция положения выходного звена;
 - относительная длина ведущего звена;
- относительная длина ведущего звена;
r - длина ведущего звена;
i - передаточное число зубчатых колес, связывающих основание кулисы с толкателем;
h - расстояние от оси поворота выходного звена до линии хода толкателя;
 - первая передаточная функция - аналог угловой скорости выходного звена;
- первая передаточная функция - аналог угловой скорости выходного звена;
ϕв.з - угловая скорость выходного звена;
ϕ - угловая скорость ведущего звена;
 - вторая передаточная функция - аналог углового ускорения выходного звена;
- вторая передаточная функция - аналог углового ускорения выходного звена;
εв.з - угловое ускорение выходного звена.
Шарнирная связь ползуна с ведущим звеном передаточного механизма включает палец, жестко закрепленный на упомянутом ползуне.
Заявляемый механизм отличается от прототипа конструктивными элементами, связью между элементами, формой выполнения и взаимного расположения элементов. Эти отличия способствуют снижению динамических нагрузок, повышению точности работы и в целом эффективности функционирования.
Включение в кинематическую связь ведущего и выходного звеньев передаточного механизма промежуточных звеньев в виде кулисы возвратно-поступательного движения и сопряженного с ней толкателя обеспечивает движение выходного звена передаточного механизма без каких-либо мягких или жестких ударов. При этом, поскольку выходное звено передаточного механизма является ведущим звеном исполнительного механизма, несущим выходные звенья с губками, выходные звенья исполнительного механизма при их движении вместе с ведущим звеном будут совершать безударное движение.
Кулиса возвратно-поступательного движения (прямолинейная кулиса) осуществляет чисто гармоническое колебательное движение, при этом движение рамки и подвижного основания будет следовать гармоническому закону - происходить по закону синуса. Такое движение кулисы будет генерироваться посредством толкателя в синусоидальный закон движения выходного звена передаточного механизма. Этим предопределяется безударное движение выходного звена передаточного механизма.
Выполнение сопряжения основания кулисы с толкателем посредством двух зубчатых колес и двух зубчатых реек позволяет толкателю передаточного механизма совершать движение, аналогичное закону движения кулисы. Использование зубчатых колес и реек для сопряжения звеньев, совершающих возвратно-поступательные движения, является предпочтительным конструктивным решением.
Для увеличения длины хода толкателя передаточного механизма его зубчатая рейка сопряжена с зубчатым колесом большего диаметра, а рейка подвижного основания кулисы - с колесом меньшего диаметра. В предлагаемом передаточном механизме ход (прямой и обратный) кулисы равняется удвоенной длине ведущего звена. При заданной длине ведущего звена и соответствующем ходе кулисы применение зубчатых колес разного диаметра формирует ход толкателя (больший, чем ход кулисы), зависящий от передаточного числа между зубчатыми колесами. При этом обеспечивается соответственно больший угол размаха выходного звена и больший ход выходных звеньев исполнительного механизма с губками для захвата изделий. Это расширяет технологические возможности механизма и диапазон его практического использования.
Выполнение подвижного соединения ведущего звена передаточного механизма с кулисой посредством ползуна, смонтированного в рамке кулисы и шарнирно связанного с ведущим звеном, обеспечивает получение рычажного механизма с двумя вращательными и двумя поступательными кинематическими парами. Механизм соответствует центральному кривошипно-шатунному механизму с ползуном, у которого длина шатуна равна бесконечности. Такой механизм является синусным, т.е. механизмом с поступательно движущейся кулисой.
Выполнение шарнирной связи толкателя передаточного механизма с выходным звеном последнего посредством пальца, закрепленного на конце толкателя, является наиболее простым, технологичным и надежным конструктивным решением.
Выполнение выходного звена передаточного механизма двуплечим имеет свои преимущества: значительно упрощает компоновку звеньев и подвижную связь выходного звена с толкателем, поворотной направляющей и с выходными звеньями исполнительного механизма.
Выражение (1) определяет правильность построения кинематической цепи многозвенника, т.е. соответствие числа звеньев и кинематических пар. Это указывает на работоспособность передаточного механизма. Компоновка передаточного механизма такова, что при положении ведущего звена перпендикулярно направлению движения кулисы (ϕ=0) выходное звено занимает положение параллельно ведущему звену (γ=0).
Зависимости (2), (3) и (4) характеризуют безударное поворотное движение выходного звена передаточного механизма, несущего выходные звенья исполнительного механизма с губками для захвата изделий. Упомянутые зависимости показывают, что при непрерывном вращении ведущего звена удары на границах ходов отсутствуют. Это улучшает динамические характеристики передаточного механизма.
Выполнение шарнирной связи ползуна, смонтированного в рамке кулисы, с ведущим звеном посредством пальца принято из условий простоты, технологичности и надежности работы механизма.
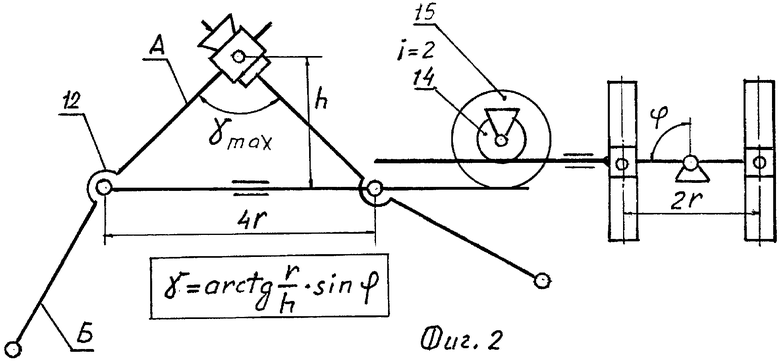
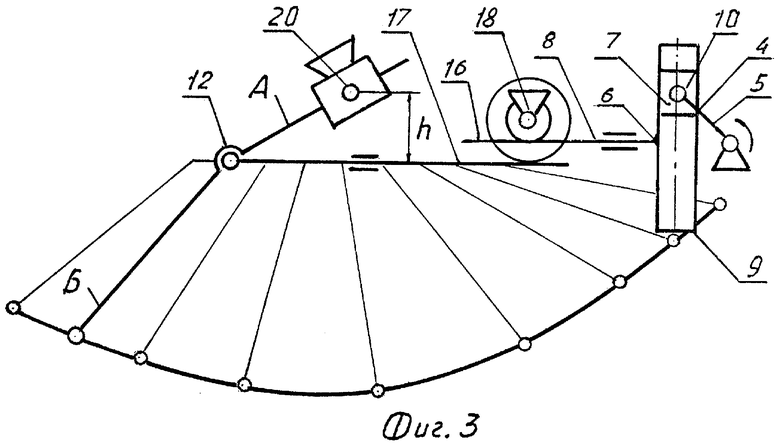
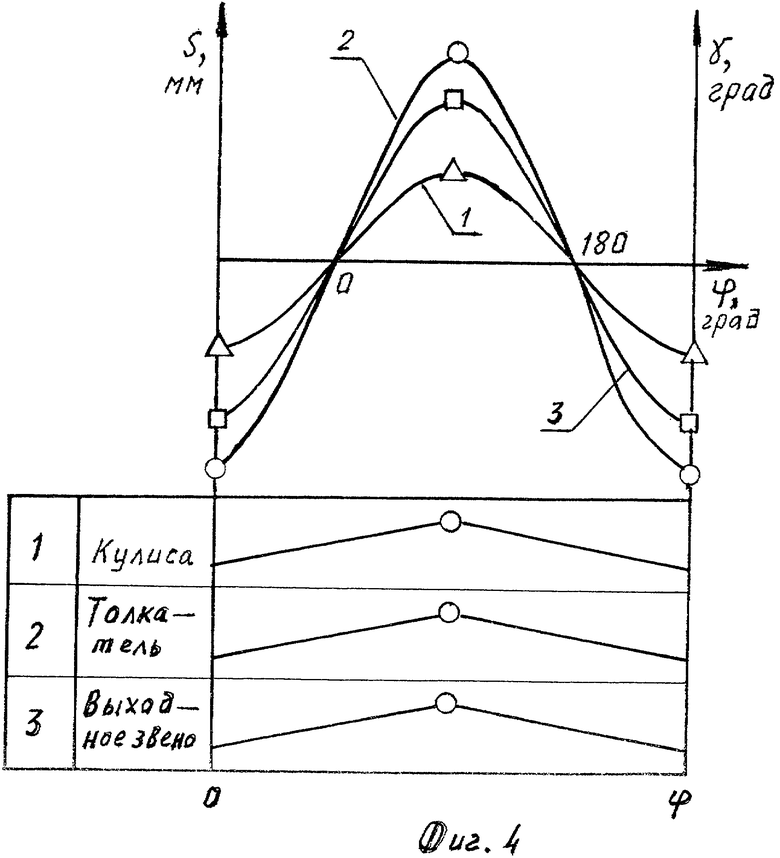
Предлагаемый комбинированный механизм поясняется чертежами. На фигуре 1 представлена кинематическая схема комбинированного механизма; на фиг.2 - схема к расчету параметров движения передаточного механизма; на фиг.3 - траектория движения выходного звена передаточного механизма; на фиг.4 - циклограмма; на фиг.5 - графики функций движения при λ=0,7.
Комбинированный механизм со сложным движением выходных звеньев содержит передаточный механизм 1, исполнительный механизм 2 с губками 3 для захвата изделий и привод, последний на чертежах не показан.
Передаточный механизм 1 выполнен в виде многозвенного рычажно-зубчатого механизма, построенного на базе кривошипно-кулисного механизма 4 с поступательным движением кулисы. Механизм 4 содержит ведущее звено-кривошип 5, закрепленный на валу привода, кулису 6 и ползун 7 для связи кривошипа с кулисой. Кулиса 6 состоит из подвижного основания 8, выполненного в виде стержня, смонтированного в неподвижных направляющих, и рамки 9, жестко закрепленной на подвижном основании под прямым углом к продольной оси последнего. Ползун 7 расположен в рамке 9 и снабжен пальцем 10 для шарнирной связи с кривошипом. Механизм 1 также включает толкатель 11, сопряженный с основанием 8 кулисы, выходное звено 12, шарнирно связанное с толкателем, поворотную направляющую 13, подвижно соединенную с выходным звеном, зубчатые колеса 14 и 15 и зубчатые рейки 16 и 17.
Зубчатые колеса и рейки обеспечивают сопряжение основания 8 кулисы 6 с толкателем 11. Колеса 14 и 15 имеют разные диаметры делительных окружностей, они смонтированы на общей оси 18 и жестко связаны между собой. Зубчатые рейки 16 и 17 жестко закреплены соответственно на основании кулисы и на толкателе 11. Колесо 14 меньшего диаметра сопряжено с рейкой 16, а колесо 15 большего диаметра - с рейкой 17. Шарнирная связь толкателя 11 с выходным звеном 12 обеспечивается посредством пальца 19, жестко закрепленного на конце толкателя. Выходное звено 12 выполнено двуплечим, при этом плечо А подвижно соединено с поворотной направляющей 13, а плечо Б кинематически связано с исполнительным механизмом 2. Поворотная направляющая выполнена в виде пустотелой призмы с центральным отверстием для подвижного соединения с выходным звеном 12 и снабжена пальцем 20, закрепленным на боковине призмы, для шарнирной связи ее со стойкой (фиг.1).
Исполнительный механизм 2 выполнен в виде рычажно-кулачкового механизма, ведущим звеном последнего является выходное звено передаточного механизма. Выходные звенья 21 и 22 исполнительного механизма шарнирно связаны с выходным звеном 12 посредством пальца 23, жестко закрепленного на свободном конце плеча Б упомянутого звена. На свободных концах звеньев 21 и 22 смонтированы ролики 24 для сопряжения с фигурными пазами 25 и 26 в теле промежуточного звена - копира 27.
Губки 3 для захвата изделий выполнены по форме передаваемых изделий и закреплены на выходных звеньях 21 и 22, при этом закрепление губок выполнено жестким, но разъемным. Это обеспечивает быструю смену губок при переналадке механизма на передачу изделий другой формы. На границах ходов, т.е. в позициях «схват изделия» и «выдача изделия» губки занимают разжатое положение.
Фигурные пазы 25 и 26 в теле копира 27 и взаимодействующие с ними ролики 24 формируют взаимное относительное положение выходных звеньев 21 и 22, при этом губки 3 имитируют движение выходных звеньев в периоде всего кинематического цикла. Поворотное движение звеньев 21 и 22 относительно выходного звена 12 может быть синхронным либо смещенным во времени, когда движение одного выходного звена не будет совпадать по времени с движением другого.
Производительность предлагаемого механизма зависит от частоты повторения рабочих циклов, зависящей от массы передаваемых изделий и закона движения выходных звеньев 21 и 22 при взаимодействии их роликов 24 с фигурными пазами в теле копира 27. Прогнозируемая производительность механизма при передаче изделий повышенной массы составляет до 40 рабочих циклов в минуту.
Комбинированный механизм со сложным движением выходных звеньев работает следующим образом.
При работе привода вращение кривошипа 5 преобразуется в возвратно-поступательное движение кулисы 6 и толкателя 11. Движение кулисы и толкателя будет осуществляться по синусоидальному закону, при этом ход кулисы в интервале прямого или обратного хода будет равен удвоенной длине кривошипа, а ход толкателя будет больше хода кулисы на величину передаточного числа между зубчатыми колесами 14 и 15. Толкатель 11 при поступательном движении генерирует сложное движение выходного звена 12, состоящее из двух простых движений: возвратно-поступательного вместе с толкателем и возвратно-поворотного с центром качания на оси пальца 19. Благоприятно, что поворотное движение звена 12, в значительной мере определяющее траекторию движения пальца 23, несущего выходные звенья 21 и 22 исполнительного механизма, осуществляется по синусоидальному закону (фиг.5). Практически важно, что влияние поворотного движения выходного звена 12 на траекторию выходных звеньев исполнительного механизма заметно возрастает с увеличением плеча Б выходного звена.
При движении звеньев 21 и 22 исполнительного механизма вместе с выходным звеном 12 передаточного механизма их ролики 24 взаимодействуют с фигурными пазами 25 и 26 копира 27, в результате этого выходные звенья с губками 3 совершают поворотные движения, обеспечивая сжатое либо разжатое положение губок.
В позиции «схват изделия» в разжатые губки подается изделие - объект манипулирования. При рабочем ходе губки 3 занимают сжатое положение, при этом они контактируют с изделием по большей части его периметра и, надежно удерживая изделие, переносят последнее из одной позиции в другую. По достижении позиции «выдача изделия» губки разжимаются и изделие выводится из механизма. При холостом ходе губки 3 также занимают сжатое положение, поскольку ролики 24 выходных звеньев взаимодействуют с теми же фигурными пазами в теле копира 27, что и при рабочем ходе. Поворотное движение выходных звеньев исполнительного механизма относительно выходного звена передаточного механизма также осуществляется по благоприятному закону, формируемому рабочими профилями фигурных пазов 25 и 26 в теле копира 27.
Работа передаточного и исполнительного механизмов, составляющих структуру кинематической цепи предлагаемого комбинированного механизма со сложным движением выходных звеньев, протекает в режиме безударного движения выходных звеньев.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2247021C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2276009C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265511C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243083C1 |
Изобретение относится к средствам обслуживания машин и оборудования, обеспечивающим захват изделия и его перемещение из одной позиции в другую. Механизм содержит передаточный механизм с кинематически связанными ведущим и выходным звеньями, в котором выходное звено подвижно с поворотной направляющей, шарнирно связанной со стойкой, и исполнительный механизм с выходными звеньями и губками для захвата изделий, ведущим звеном которого является выходное звено передаточного механизма, и промежуточным звеном - копиром. Кинематическая связь ведущего и выходного звеньев передаточного механизма содержит промежуточные звенья, выполненные в виде кулисы, совершающей возвратно-поступательные движения, и сопряженного с ней толкателя. Кулиса подвижно соединена с ведущим звеном, а толкатель шарнирно связан с выходным звеном механизма. Выходное звено передаточного механизма выполнено двуплечим, одно из плеч подвижно соединено с поворотной направляющей, с другим плечом шарнирно связаны выходные звенья исполнительного механизма, сопряженные с фигурными пазами в теле копира. Изобретение позволяет обеспечить безударный режим движения выходных звеньев, что способствует повышению производительности, и использовать его для передачи изделий повышенной массы. 9 з.п. ф-лы, 5 ил.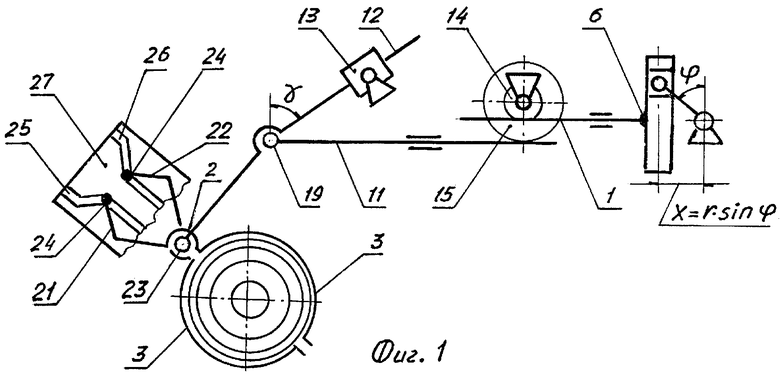
W=3·n-2p5-p4=3·7-2·9-2=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев, n=7;
р5 - число низших кинематических пар, p5=9;
р4 - число высших кинематических пар, р4=2.
γ=arctgλ·sinϕ,
где ϕ, γ - текущий угол поворота соответственно ведущего и выходного звена;
γ=f(λ, ϕ) - функция положения выходного звена;
 - относительная длина ведущего звена;
- относительная длина ведущего звена;
r - длина ведущего звена;
i - передаточное число зубчатых колес, связывающих основание кулисы с толкателем;
h - расстояние от оси поворота выходного звена до линии хода толкателя;
 - первая передаточная функция - аналог угловой скорости выходного звена;
- первая передаточная функция - аналог угловой скорости выходного звена;
ϕв.з. - угловая скорость выходного звена;
ϕ - угловая скорость ведущего звена;
 - вторая передаточная функция - аналог углового ускорения выходного звена;
- вторая передаточная функция - аналог углового ускорения выходного звена;
εв.з - угловое ускорение выходного звена.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265510C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265511C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2266192C1 |
| US 5539291 A, 23.07.1996 | |||
| US 5885052 A, 23.03.1999. | |||

