Известны датчики угла .накдода грузолодъемных амашин, содержащие спирали, |расположенные в корпусе с токопроводящей жидкостью. Спирали включены в электросистему привода машины « при изменении угла наклона машины обеспечивают соответствующее изменен ие сопротивления.
Отличием предлагаемого датчика является то, что он выполнен в виде двух соосно расположенных друг над другом изолированных и .скрепленных между собой корпусов, одноимвнные спирали которых представляют собой Л|рОТ1Иволежащие плечи электрического моста. Koipnyca выполнены в виде пересекающихся в центре под прямым углом каналов, направленных вверх ло криволинейной образующей. Торцы каналов соединены между собой прубка-ми.
Такое выполнение датчика иовыщает точность .срабатывания и надежность его в работе.
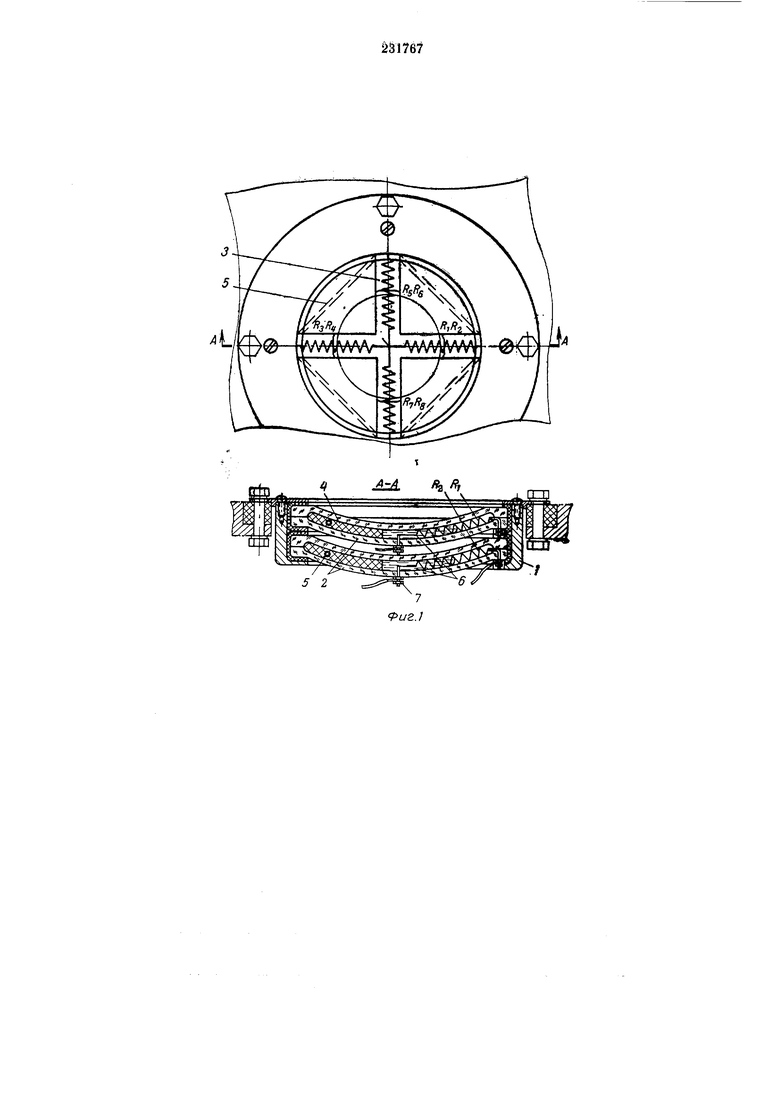
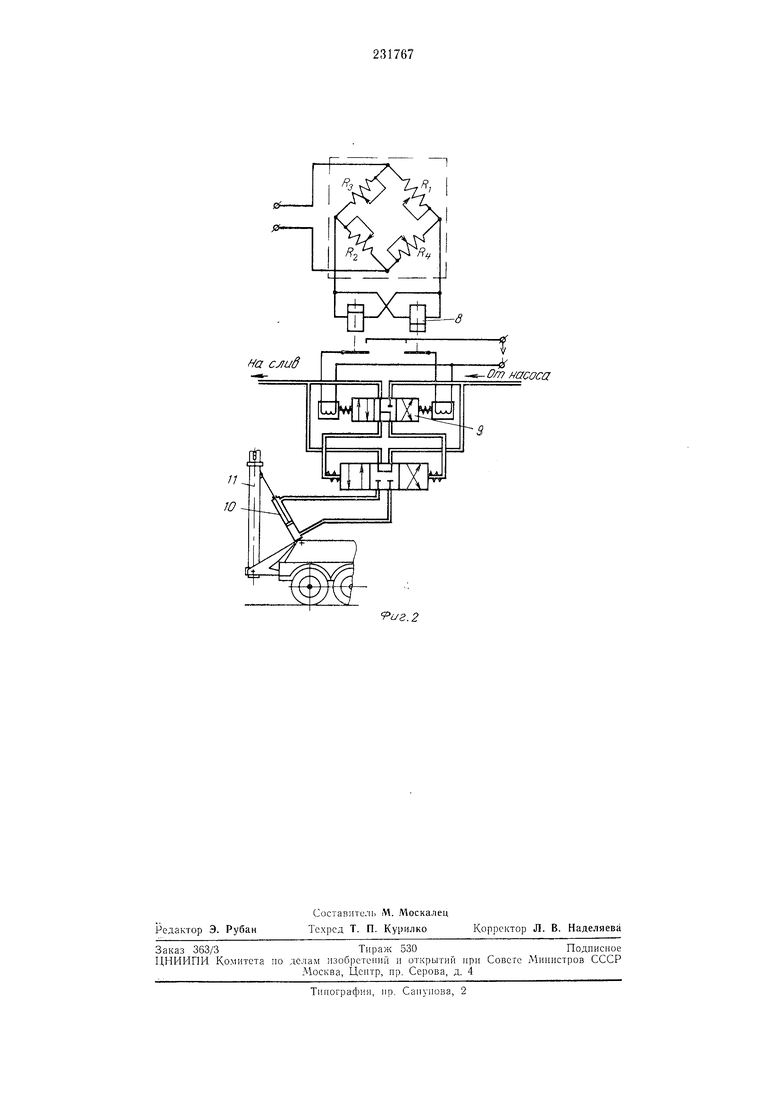
На фиг. 1 изображен предлагаемый датчик в двух проекциях; на ,фиг. 2 - принципиальная электрогидравлическая схема использования датчИКа в устройстве для автоматического лри.ведения в ве|ртикальное положение колонны автомобильного подъемника IB одной плоскости.
полненные для упрощения конструкции в виде сферических уровней. Каналы 3 в корпусах образованы вкладышами 4 из эластичного диэлектрического материала, например резины .Торцы каналов соединены между собой трубками 5 с внутренним калиброванным диаметром.
В вертикальной плоскости каналы направлены вверх по шаровой образующей; они могут быть на.правлены вверх и по любой другой образующей, например, параболической. В да.нном случае шаровая образующая принята исходя из того, что такая форма обеспечивает лрЯлМолинейную зависимость перемещения токопроводящей жидкости от угла наклона корпусов датчика.
Внутрь корпуса налита токопроводящая жидкость 6, причем количество жидкости в обоих корпусах должно быть одинаковым.
В каналах в верхнем корпусе размещаются спирали RI, RS и 5, и Rz, Ki и R, R&; в нижнем - спирали Rz, Rt и Re, Rs, изготовленные из проволОКИ с высоким оммическим сопротивлением. Спирали подключаются к
электросистеме с помощью впаянных в корпус клемм 7.
реле 8 со встречно расположенными обмотками. Контакты поляризоваииого реле включены в цепь управляющих электромагнитов пидраВлического золотника 9, к которо му с одной сторОНы Осуществляется подвод рабочей жидкости от насоса. На выход золотника включен тидравличесКИЙ цилиндр 10, поддерживающий колонну // автомобильного подъемника.
Датчик работает следующим o6ipa30M. При горизонтальном иоложенин KopnycoiB токоироводящая жидкость шунтирует спирали на одинаковую величину и ток в диагонали моста отсутствует. При этом колебания объема токолроводящей жидкости на работе датчика не отражаются, так как при этом происходит увеличение или уменьшение всех четырех сопротивлений RI, RZ и 3, одиоврембпно, что не нарущает баланса моста.
При отклонении // подъемника от вертикали одно:временно нроисходит наклои закреплеппых на пей корпусов 2 датчика. Соотношение величин погруженных в токонроводящую жидкость спиралей измеряется, вследствии чего баланс моста нарушается и щ диагонали его ноявляется ток, величина которого изменяется в соответствии с :изменен1ием угла гпа|Клона колонны. При онределенной величине тока поляризованное реле сработает в онределенную сторону в зависимости от наиравления наклона .колонны подъемника. При этом замыкается цепь одного из управляющих электромагнитов, включающего пидрозолотник в положение, обеспечивающее соединение соответст1вующей нолости поддерживающего гидроцилиндра 10 с иолоетью пагнетания гидронасоса. Таким образом npoiMcxoAHt возвращение колонны подъемника в вертикальное положение.
Паличие трубок 5, соединяющих торцы ка5 иало(В .3, обеспечивает демпфирование вытесняемого при перемещениях то.ко:проводящей жидкости воздуха и, следовательно, предотвращает ее колебания и разбрызгивание.
Величина угла отклонения от вертикали колоппы подъемника, нри которой П1роисход ит срабатывание системы, определяется регулировкой поляризованного реле на определенную величину тока.
Точность работы датчика повышается с увеличением радиуса кривизны корпусов.
Предмет изобретения
Датчик угла наклона грузоподъемной машины, содержащий расположенные в корпусе
0 с токопроводящей жидкостью спирали, включенные в электросистему привода машины, о-беспечивающие нри изменении угла наклона 1мащины соответствующее из-менение сопротивления, отличающийся тем, что, с целью
5 повышения точности срабатывания и надежности работы датчика, последний выполнен в виде двух iCoocHo расположенных друг над другом изолированных и скренленных между сОбой корпусов, одноименные спирали которых представляют собой противолежащие плечи электрического .моста.
2. Датчик по п. 1, отличающийся тем, что корпуса вынолнены в виде пересекающихся в центре под нрямым углом, направленных вверх
5 по криволинейной образующей каналов, торцы которых соединены между собой трубками.
От насоса
fuB.2
| название | год | авторы | номер документа |
|---|---|---|---|
| БИБЛИОТЕКА ^^'1 | 1973 |
|
SU387295A1 |
| ДАТЧИК ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ жидкихПРОДУКТОВ в ПОТОКЕ | 1971 |
|
SU292107A1 |
| Система слежения гелиоустановки | 1983 |
|
SU1135973A1 |
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ ГОЛОЛЕДА НА ПОВЕРХНОСТИ | 1969 |
|
SU241762A1 |
| УСТРОЙСТВО для РЕГИСТРАЦИИ ПОЛОЖЕНИЯ ЧАСТЕЙ ТЕЛА | 1972 |
|
SU339279A1 |
| ПРИБОР ДЛЯ СИГНАЛИЗАЦИИ О СОДЕРЖАНИИ ГОРЮЧИХ | 1970 |
|
SU269566A1 |
| Управляющее устройство к землеройным машинам | 1978 |
|
SU754001A1 |
| Регулятор режима работы землеройной машины | 1972 |
|
SU544732A1 |
| УСТРОЙСТВО для ПРОВЕРКИ ГИДРОСИСТЕМ ЛЕТАТЕЛЬНЫХАППАРАТОВ | 1968 |
|
SU212762A1 |
| СТАБИЛИЗАТОР УГЛА НАКЛОНА | 1972 |
|
SU352127A1 |