1
Изобретение касается автоматизации регулирования режима работы землеройной машины путем изменения положения ее рабочего органа в функции буксования колес.
Известен регулятор режима работы землеройной машилы, включающий датчик буксования, мост на сопротивлениях, реле, золотник, гидроцилиндр рабочего органа, изодромный следящий гидроцилиндр.
Однако это устройство имеет сложную конструкцию и малую эффективность при наличии в системе гидропневматических аккумуляторов.
Целью изобретения является улучшение управления копанием землеройной машины.
Это достигается тем, что в качестве датчика буксования использован фрикционно-винтовой механизм, соединенный с движками переменных сопротивлений двух плеч моста, движки переменных сопротивлений двух других плеч которого соединены с изодромным следящим гидроцилиндром.
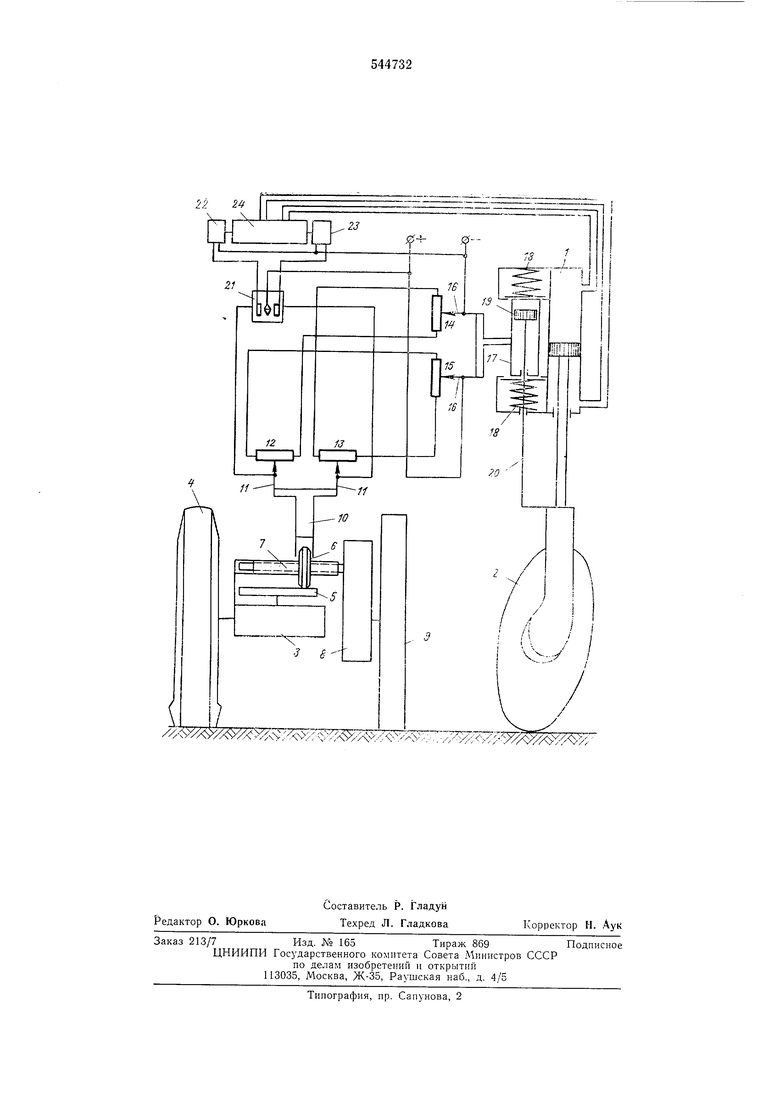
На чертеже представлена схема предлагаемого регулятора. Она включает гидроцилиндр 1 управления рабочим органом 2, редуктор 3, нередающий вращение от ведущего колеса 4 на тарелку 5, имеющую фрикционную связь с роликом 6, сидящим на винте 7, который получает вращение через редуктор 8 от дополнительного колеса 9. Связанная с роликом 6
каретка 10 имеет контактные лепестки 11, скользящие по проволочным сопротивлениям 12 и 13, которые с сопротивлениями 14 и 15 образуют мост. По сопротивлениям 14 и 15 перемещаются контактные лепестки 16, связанные с корпусом 17 изодромнсго следящего гидроцилиндра, который сжат но торцам 18. Внутри корпуса 17, заполненного жидкостью, находится поршень 19, сидящий на штоке 20, связанном с рабочим органом 2. В диагональ моста (сопротивления 12, 13, 14, 15) включено ноляризованное реле 21, которое включает электромагниты 22 или 23, управляющие золотником 24, который, в свою очередь, управляет гидроцилипдром 1.
Описанный регулятор работает следующим образом.
При установивщемся движении мащины ролик 6 находится на определенном расстоянии от центра вращения тарелки 5. Это расстояние ОПределяется буксованием ведущего колеса 4 в данны11 момент. Проволочные сопротивления 12 и 13 расположены таким образом относительно тарелки 5, что ток в д)1агонали моста равен нулю для заданного значения буксования. При уменьшении буксовання колеса 4 ролик 6 перемещается к краю тарелки 5, а при увеличении - к ее центру. При этом в диагонали моста возникает ток, в результате чего срабатывает поляризованное
реле 21, которое, например, при уменьшении буксования включает электромагнит 22 и через гидроцилиндр 1 заглубляет рабочий орган 2, что увеличивает силу сопротивления при копании, а следовательно, и буксование. При увеличении буксования реле 21 включает электромагнит 23 и через гидроцилиндр 1 выглубляет рабочий орган 2, что уменьшает силу сопротивления и буксование.
При перемещении рабочего органа 2 через шток 20 и поршень 19 перемещается корлус 17 и сжимается соответствующая пружина 18, так как жидкость не успевает протекать через калиброванное отверстие в поршне 19.
Контактные лепестки 16, связанные с корпусом 17, перемещаясь по сопротивлениям 14 и 15, сбалансируют мост из сопротивлений 12, 13, 14 и 15, ток в диагонали этого моста становится равным нулю, поляризованное реле 21 отключает электромагниты 22 или 23 управления золотником 24, и перемещение рабочего органа прекращается. Таким образом, переключение гидроцнлиндра 1, перемещающего рабочий орган 2, происходит раньше, чем заканчиваются переходные Процессы в самом регуляторе и управляемой им машине.
Под действием сжатой пружнны 18 жидкость перетекает через поршень внутри корпуса 17, который через некоторое время возвращается в нейтральное положение, а контактные лепестки 16 занимают исходное положение. Если к этому времени новое положение рабочего органа соответствует заданному значению буксования, то процесс регулирования заканчивается, если не соответствует, то вновь происходит включение поляризованного реле 21, которое через соответствующие элементы включает гидроцилиндр 1 для перемещения рабочего органа 2 в соответствующую
сторону, и Процесс регулирования продолжается до тех пор, пока значение Силы сопротивления при копании не достигает величины, соответствующей заданному значению буксования.
Формула изобретения
Регулятор режима работы землеройной машины, включающий датчик буксования, мост
на сопротивлениях, реле, золотник, гидроцилиндр рабочего органа, изодромный следящий гидроцилиндр, отличающийся тем, что, с целью улучшения управления копанием землеройной мащины, в качестве датчика буксования использован фрикционно-винтовой механизм, соединенный с движками переменных сопротивлений двух плеч моста, движки переменных сопротивлений двух других плеч которого соединены с изодромным следящим гидроцилиндром.
п г«
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования величины буксования строительной машины | 1985 |
|
SU1301942A1 |
| Устройство управления рабочим органом землеройно-транспортной машины | 1991 |
|
SU1803505A1 |
| ГИДРОПРИВОД ЗЕМЛЕРОЙНОЙ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2019 |
|
RU2719295C1 |
| Литьевая машина для переработки полимерных материалов | 1975 |
|
SU566739A1 |
| Устройство управления рабочим процессом землеройно-транспортной машины | 1986 |
|
SU1323672A1 |
| Бульдозер | 1985 |
|
SU1330274A1 |
| Гидропривод ковшового погрузчика | 1979 |
|
SU1273463A1 |
| Автоматический регулятор землеройной машины | 1982 |
|
SU1120073A1 |
| Скрепер с телескопическим ковшом | 2023 |
|
RU2808752C1 |
| Следящая система управления рабочим органом землеройной машины | 1982 |
|
SU1074975A2 |