В области автоматизации производственных процессов известны датчики нолол ения ротора бесконтактного двигателя постоянного тока, содержащие обойму с чувствительными элементам н дроссельного тииа и якорь с постоянными магнитами.
Однако известные датчики положения с дросселями насыщения имеют невысокую крутизну нарастания и спада выходных электрических сигналов и низкую «адежность.
Предлагаемый датчик устраняет недостатки известных и отличается от них тем, что обойма датчика со стороны якоря снабжена плоскими Г-образными магнитопроводами, прилегающими к сердечнику дросселя, плоскость окна которого перпендикулярна радиусу обоймы, а постоянные магниты якоря, имеющие форму сегментов, экранированы магнитопроводящими пластинами, расположенными с двух сторон сегментов по оси магнитов вдоль образующей цилиндрической поверхности якоря.
Это позволяет повысить надежность и улучшить выходные электрические характеристики.
ния может быть любой формы, в частности лучше использовать ферритовые кольца с прядмоугольной петлей гистерезиса серийного производства. Обмотка дросселя 3 насыщения
накладывается на сердечник с двух краев так, чтобы он непосредственно мог касаться Г-образных магнитоироводов 2. Применение последних позволяет расположить сердечник дросселя 3 так, как показано на чертеже, что
уменьшает обой.мы датчика и получается гарантированный зазор обоймой и якорем путем расточки внутреннего диаметра обоймы. При этом исключаются передача механических усилий на сердечник и его повреждение, а следовательно, и изменение его магнитных свойств. В ряде случаев дроссель 5 может заливаться эпоксидным компаундом, что в значительной степени повышает наделчность при эксплуатации в тяжелых климатических
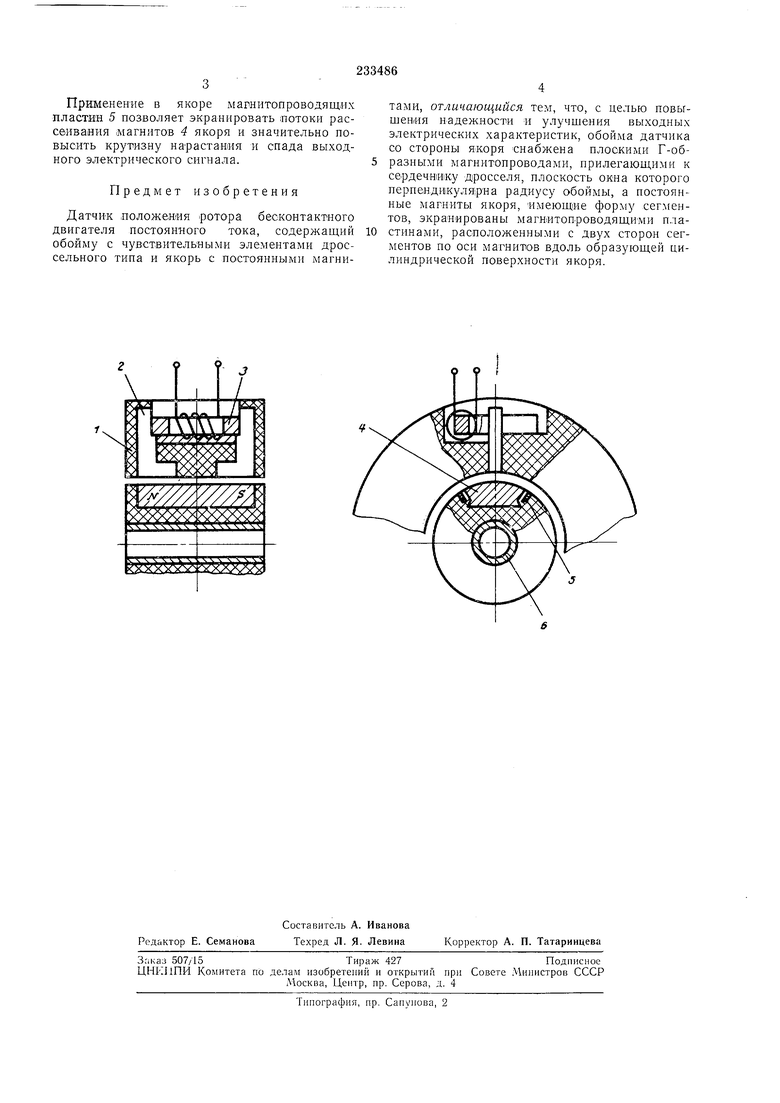
условиях. Якорь датчика изготавливается из немагнитного материала путем прессования или литья, при этом он армируется постоянными магнитами 4 в виде сегментов, с экранирующими пластинами 5 и втулкой 6. Все
названные детали якоря не требуют точной обработки. Цилиндрическая поверхность якоря обрабатывается после напрессовки на вал двигателя при шлифовке магнита-ротора и шеек вала под подшипники за одну установПрименение в якоре магнитопроводящ.их пластин 5 позволяет экранировать потоки рассеивания магнитов 4 якоря и значительно новысить крутизну нарастания и спада выходного электрического сигнала.
Предмет изобретения
Датчик положения ротора бесконтактного двигателя ностоянного тока, содержащий обойму с чувствительными элементами дроссельного тииа и якорь с постоянными магнитами, отличающийся тем, что, с целью повышения надежности и улучшения выходных электрических характеристик, обойма датчика со стороны якоря снабжена плоскими Г-образиыми магнитопроводами, прилегающими к сердечнику дросселя, плоскость окна которого перпендикулярна радиусу обоймы, а постоянные магниты якоря, имеющие форму сегментов, экранированы магнитоп-роводящими пластинами, расположенными с двух сторон сегментов по оси магнитов вдоль образующей цилиндрической поверхности якоря.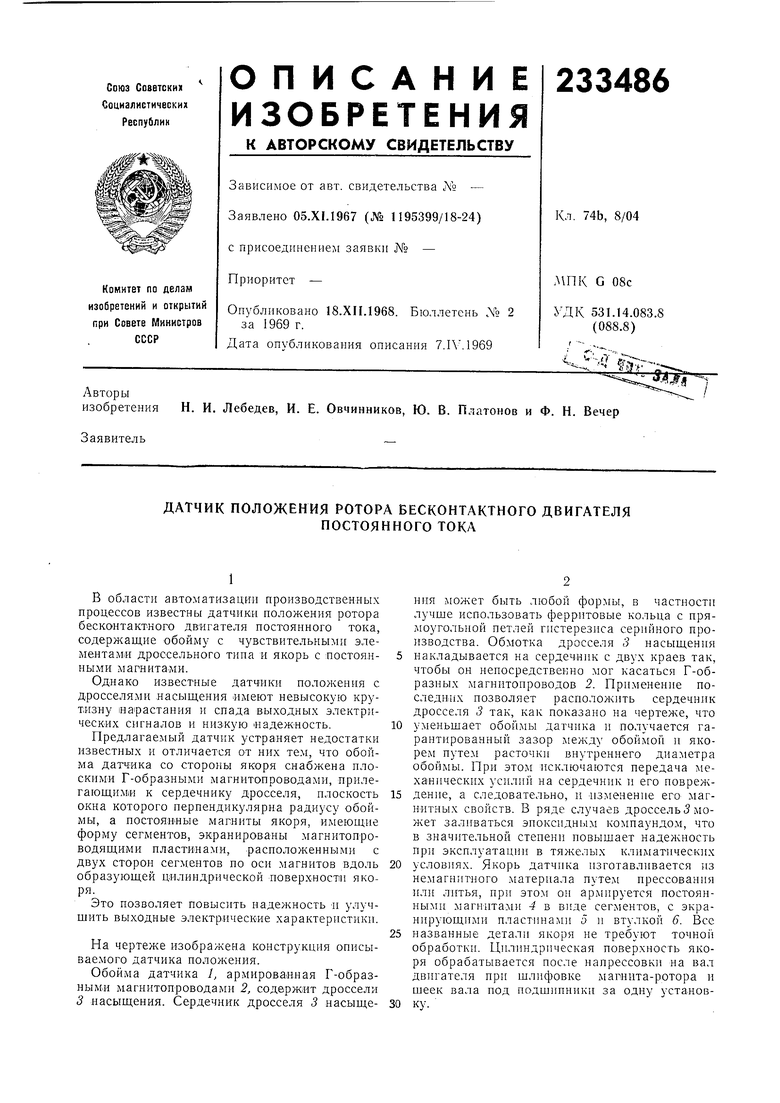
| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктивный датчик положения | 1987 |
|
SU1415050A1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ БЕСКОНТАКТНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437202C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2436221C1 |
| Вентильный электродвигатель с тахометрическим генератором | 1985 |
|
SU1419531A3 |
| Магнитоэлектрический моментный двигатель | 1989 |
|
SU1642557A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2001 |
|
RU2216843C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ДРОССЕЛЬНОЙ ЗАСЛОНКИ | 2005 |
|
RU2298148C2 |
| МОМЕНТНЫЙ ПРЕЦИЗИОННЫЙ ДВИГАТЕЛЬ | 2018 |
|
RU2686686C1 |
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
О 9
