Предлагаемое изобретение относится к автомобильному электронному приборостроению и может быть непосредственно использовано в электронных системах управления автомобилем для определения угла открытия дроссельной заслонки, степени нажатия педали акселератора, положения клапана рециркуляции отработавших газов, в других автомобильных системах, требующих получения аналогового или ШИМ-сигнала об абсолютном угловом положении вращающегося объекта (вала), а также для бесконтактного детектирования абсолютного углового положения большого числа вращающихся объектов во многих других отраслях легкой и тяжелой промышленности.
Аналогом заявляемого устройства является датчик углового положения с устройством Холла и постоянным магнитом заданной формы (United States Patents 5159268 от 27 октября 1992 г.).
Устройство описывает два предпочтительных варианта формы магнита - продолговатой и колоколообразной формы, позволяющие добиться высокой линейности при его вращении.
Недостатком данного устройства является сложность магнитной системы, необходимость использования магнитов специальной формы и применения расчетных математических методов.
Аналогом заявляемого устройства является магнитный датчик углового положения с улучшенной выходной линейностью (United States Patents 5444369 от 22 августа 1995 г.).
Устройство использует массивные стационарные аксиальные магнитопроводы и вращающийся магнитопровод, к которому прикреплены один или более магнитов.
К недостаткам данного устройства относятся громоздкость, конструктивная сложность, применение как расчетных методов, так и настройки и регулировки устройства, отсутствие адаптированности к специальным требованиям, предъявляемым к механике автомобильных датчиков, работающих в ограниченном диапазоне угла поворота.
Прототипом заявляемого датчика является измерительное устройство для бесконтактного определения угла вращения (United States Patent 6534971 от 18 марта 2003 г.).
Данное устройство включает ротор, на котором расположен постоянный магнит, имеющий диаметральное направление намагниченности, и элемент Холла, расположенный асимметрично и описывающий эллиптическое вращательное движение постоянного магнита. При этом никакие концентраторы магнитного потока в данной конструкции не используются. Указанная магнитная система позволяет получить область выходной характеристики с крутой областью снижения и характерными плоскими областями.
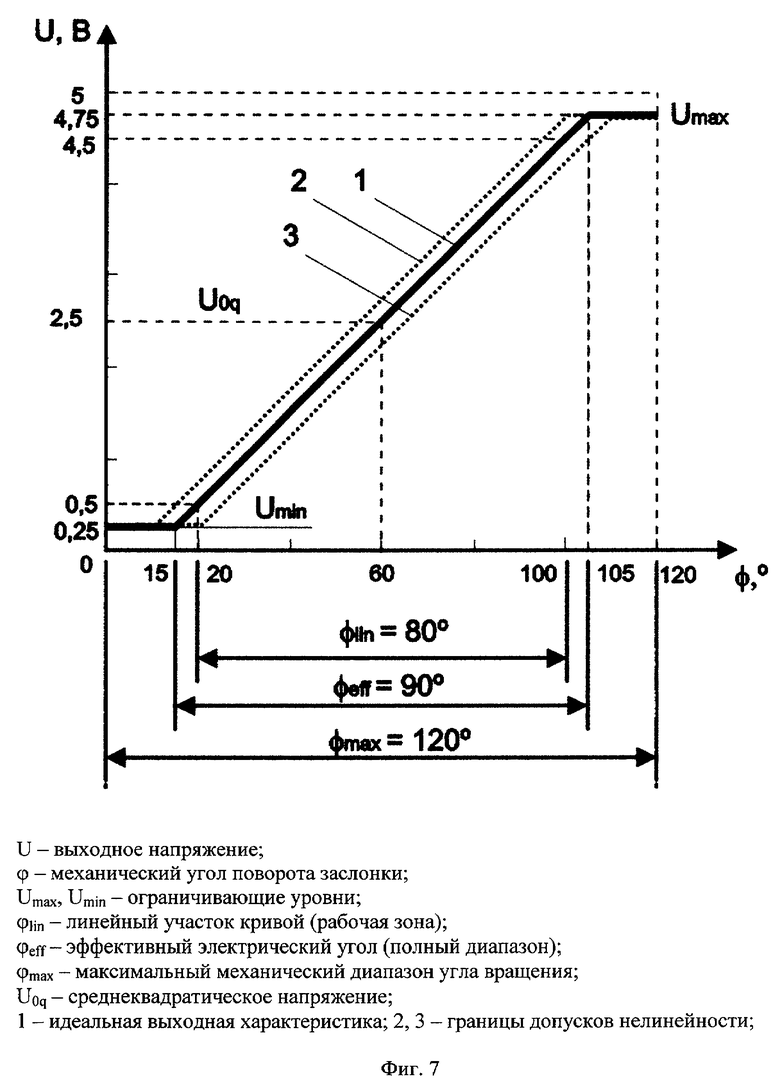
Недостатком данного устройства является сужение диапазона измеряемого угла вследствие недостаточной однородности выходной характеристики (в описании изобретения указывается угловая область линейности до 80°, тогда как во многих случаях для эффективной работы датчика требуется измерять углы до 100...120°), присутствие плоского участка кривой, недостаточная линейность характеристики в полном рабочем диапазоне. В устройстве отсутствуют специальные схемотехнические и механические средства адаптации к конкретным условиям работы датчика.
Задачи изобретения - повышение точности измерений, показателя линейности (абсолютных и относительных показателей, повторяемости), увеличение чувствительности, расширение функционального диапазона измеряемого угла, увеличение линейного участка, развитие адаптационных признаков к конкретным условиям работы, повышение надежности, дальнейшее упрощение конструкции устройства и технологии его сборки и монтажа.
Поставленные задачи решаются тем, что в бесконтактном датчике для определения углового положения, включающем ротор из материала, не проводящего магнитное поле, с расположенным на поддерживающем основании ротора цилиндрическим или кольцевым с круговым (или эллиптическим) основанием, диаметрально намагниченным (или намагниченным вдоль одной, предпочтительно большей, полуоси эллипса) постоянным магнитом, и статор, представляющий собой линейный магниточувствительный элемент Холла, описывающий эллиптическое или круговое вращательное движение магнита, для повышения однородности и равномерности характеристики вышеуказанный элемент Холла располагается симметрично с внешней поверхности магнита, таким образом, что плоскость его лицевой поверхности параллельна оси вращения магнита и перпендикулярна любой плоскости, содержащей диаметральную ось магнита, при этом ось симметрии чувствительного элемента Холла коаксиальна вышеуказанной диаметральной оси, плоскость симметрии магнита с нулевым значением магнитной индукции поля соответствует среднеквадратическому напряжению на выходной характеристике устройства, вышеуказанный аксиальный элемент Холла располагается на постоянном расстоянии от магнита, определяемом из конструктивных соображений, и для увеличения чувствительности, расширения линейного участка до 120-ти механических градусов, с обратной стороны вышеуказанного элемента Холла в рабочей области датчика располагается аксиальный ферромагнитный концентратор (магнитопровод) нормальных составляющих силовых линий магнитного поля.
Вышеуказанный элемент Холла допускает программирование после сборки всего устройства выходной характеристики, в том числе ограничительных уровней напряжения на механических границах измеряемого угла, параметров чувствительности, среднеквадратического напряжения и т.д.
Дополнительно для развития адаптационных признаков устройства к конкретным условиям работы и повышения надежности устройство имеет возможность обеспечивать основное вращение ротора по часовой стрелке и возвратное движение против часовой стрелки. В устройство вводятся ограничительные и упорные поверхности для механического ограничения осевого перемещения ротора, механические ограничители максимального измеряемого угла (упоры) в корпусе и роторной части, цилиндрическая или коническая возвратная пружина кручения для противодействия вращательному движению вала управляющего привода, установленная вне рабочей зоны бесконтактного взаимодействия вращающегося магнита и вышеуказанного элемента Холла. Изоляция элемента Холла от движущихся механических частей и его электрическая изоляция от магнитопровода выполняется за счет корпусных деталей датчика.
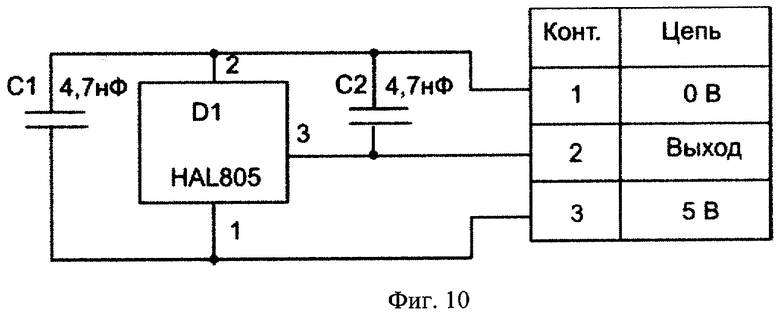
Для защиты вышеуказанного элемента Холла от обратного напряжения, перенапряжения, короткого замыкания выхода, импульсных помех по цепи питания и выхода, если эта защита не предусмотрена в интегральной схеме вышеуказанного элемента Холла, схема устройства, расположенная на плате датчика, содержит необходимые схемы защиты (стабилитрон, выпрямитель, конденсаторы фильтров и др.).
Бесконтактный датчик положения дроссельной заслонки показан на чертежах.
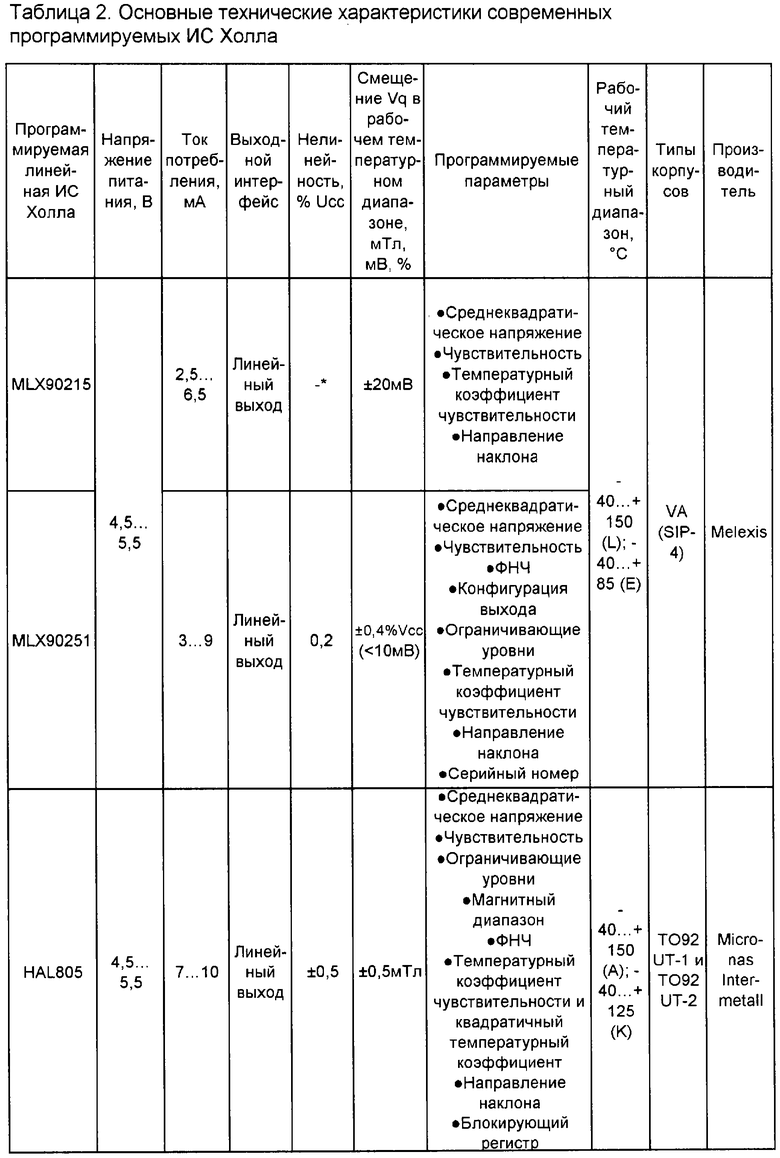
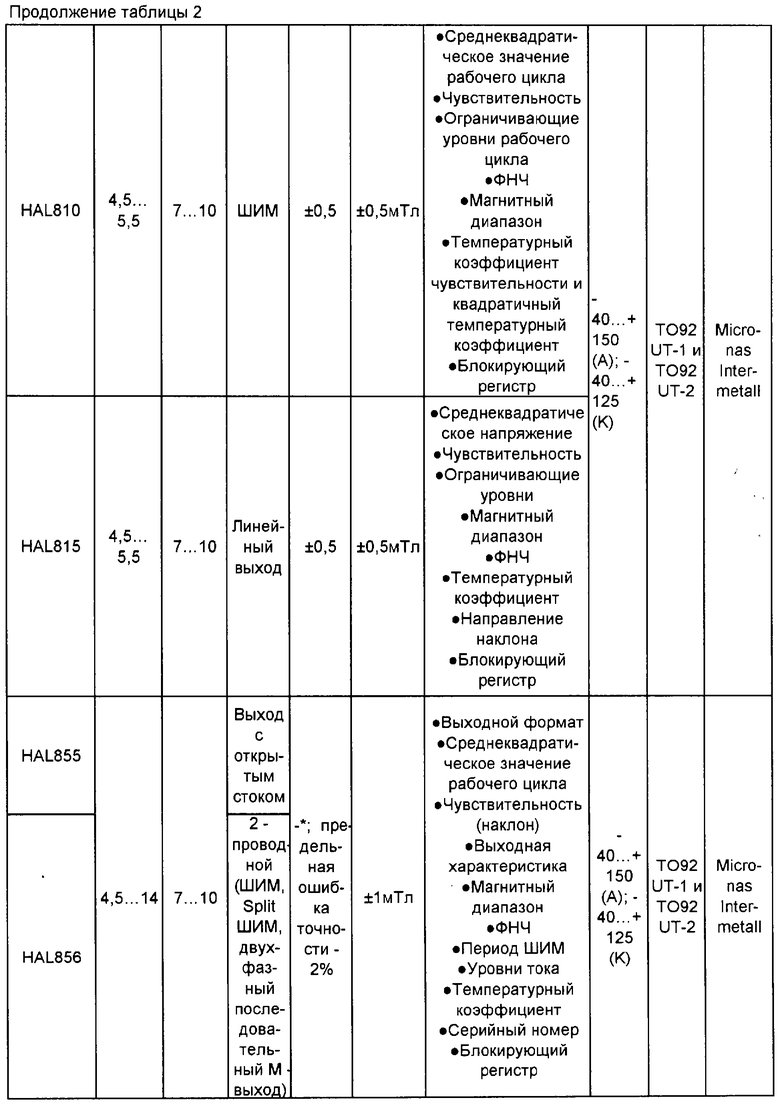
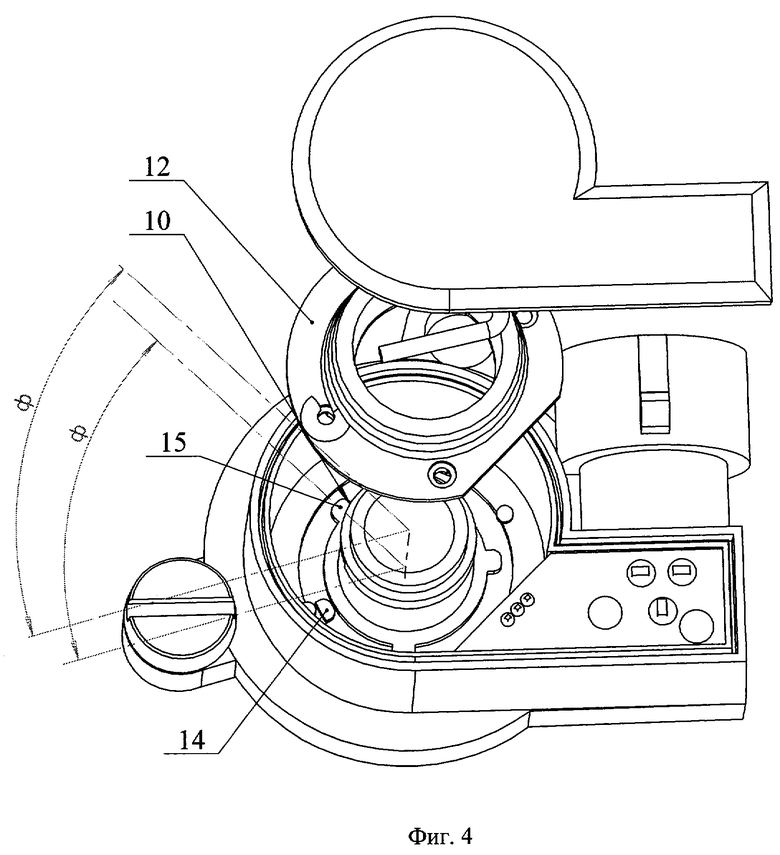
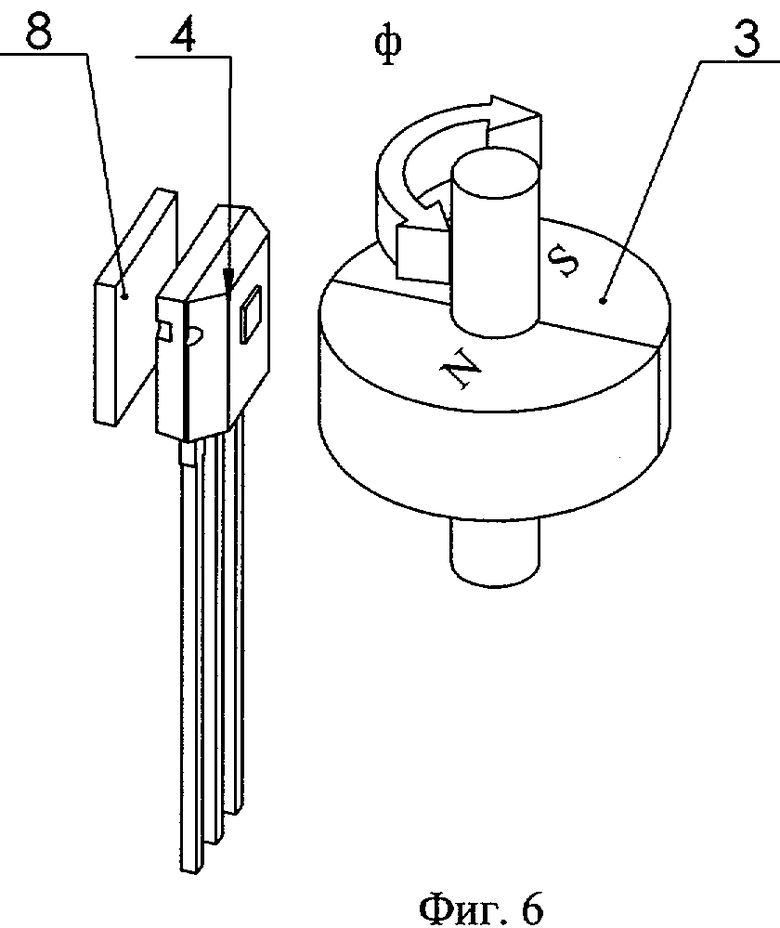
На фиг.1 показаны проекционные виды устройства и общий аксонометрический вид, на фиг.2 показан вид устройства в разрезе, иллюстрирующий принцип действия устройства, на фиг. 3 - вид устройства с его механически определенными границами измеряемого угла, на фиг.4 - вид датчика в его симметричном положении с нулевым значением магнитной индукции поля в вертикальной плоскости симметрии элемента Холла, на фиг.5, 6, 7, 8 даны иллюстрация принципа действия, изображение выходной характеристики и показан соответствующий диапазон вращения магнитного поля, на фиг.9 показаны примеры конструкций магнитопроводов, на фиг.10 приведена схема электрическая принципиальная устройства. В таблицах 1 и 2 приведены технические характеристики подходящих для этой схемы известных компонентов.
Бесконтактный датчик положения, показанный на фиг.1-9, состоит из неподвижного корпуса 1, роторного узла 2 с диаметрально намагниченным постоянным магнитом 3, интегрального датчика Холла 4, печатной платы 5, контактов разъема 6, пружины 7, ферромагнитного концентратора 8 (магнитопровода) и крышки 9. Ротор 2, состоящий из двух частей (позиция 2 указывает на верхнюю втулку 11), механически связан с вращающимся валом детектируемого объекта (цели) и имеет возможность поворота в основании корпуса 1. С обратной стороны ротора 2 в нижней втулке 10 имеется паз для установки устройства на вал с заданной начальной ориентацией, определяемой внутренней ребрами паза. Корпус 1 жестко крепится двумя винтами 13 к неподвижной части объекта.
Корпус 1 выполняется в сборке с контактами разъема 6 (по технологии обливки) и магнитопроводом 8. Интегральный линейный датчик Холла 4 устанавливается на плате 5 и запаивается. Плата 5 устанавливается в корпусе 1 поверх упорных штырей днища корпуса 1, верхняя часть которых оплавляется. Симметричная механическая ориентация датчика 4 относительно магнита 3 обеспечивается конструктивно. Контакты 6 запаиваются на плате 5.
Для механического ограничения осевых перемещений роторного узла в корпусе 1 выполнено двойное днище. Верхнее днище 12 фиксируется поверх роторного узла 2 на оплавляемых штырях и приклеивается к днищу корпуса 1. Механический угол ϕ ограничивается упорами 14 в основании корпуса и выступами 15 втулки 10 ротора 2.
Постоянный магнит 3 жестко устанавливается (запрессовывается и вклеивается) в верхней втулке 11 ротора 2 поверх пружины кручения 7, расположенной вне рабочей зоны бесконтактного взаимодействия магнита 3 и датчика 4. Осевое перемещение верхней втулки 11 ротора 2 механически ограничивается кольцевым выступом на внутренней стороне верхней крышки 9 датчика.
Предлагаемый датчик отличается от множества подобных уже существующих вариантов применением ферромагнитного концентратора 8 (магнитопровода) специальной формы совместно, в частности, с программируемым датчиком Холла 4. За счет применения концентратора, других функциональных и конструктивных особенностей (см. фиг.2-9) устройство отличается увеличенной чувствительностью и надежностью. Это означает, что при прочих стандартных возможностях в конструкции можно использовать большие воздушные зазоры, применять более слабые (по величине остаточной намагниченности) и меньшие по размеру магниты.
В конструкции особенно важным является начальное размещение магнита 3: в нулевом положении должны быть совмещены механическая плоскость симметрии датчика 4 и магнитная плоскость симметрии магнита 3 с нулевым значением магнитной индукции поля (или средним из магнитного диапазона датчика). Это положение показано на фиг.4 и соответствует среднеквадратическому напряжению выходной характеристики. Начальная ориентация магнита 3 относительно датчика 4 обеспечивается в процессе сборки: непосредственно перед его жесткой установкой определяется по результатам измерений магнитного поля, например, тесламетром, (гауссметром), калиброванной линейной ИС Холла или с помощью специальных аппаратно-программных средств.
В этом положении в естественном (без ферромагнитного концентратора) выравнивании магнитных силовых линий поля относительно поверхности элемента Холла преобладает тангенциальная составляющая, а при повороте магнита на 90° (совпадении плоскостей симметрии полюса магнита и элемента Холла) в естественном выравнивании линий поля будет преобладать нормальная составляющая.
Применение ферромагнитного концентратора 8 позади обратной стороны ИС Холла 4 позволяет равномерно увеличить нормальную составляющую магнитного поля на чувствительном элементе - как в нулевом положении и на малых углах вращения, так и при приближении к чувствительному элементу полюса магнита.
Такое взаимное расположение магнита 3, магниточувствительного элемента 4 и магнитопровода 8 в магнитной системе позволяет достичь однородного увеличения крутизны магнитного сигнала, пропорционального величине остаточной намагниченности магнита. Для достижения максимального эффекта концентрации могут использоваться магнитопроводы 8 специальной формы, примеры которой показаны на фиг.9 (с вертикальным прямоугольным и крестообразным вырезами, центрированными относительно чувствительного элемента Холла, для увеличения перпендикулярных составляющих магнитного поля по краям вырезов).
Повышение чувствительности датчика достигается только за счет использования ферромагнитного концентратора 8, но при оптимальном подборе других параметров магнитной системы. Следует отметить, что в системах на эффекте Холла с постоянным магнитом из обычного материала типа NdFeB (в промышленности обычно выпускаются магниты с намагниченностью 1000...1200 мТл) можно использовать рабочие зазоры порядка 5...8 мм и нет смысла максимально приближать датчик к магниту. Оптимальный наклон выходной характеристики под углом порядка 45° (чувствительность) рассчитывается с использованием средств программирования датчика.
Дальнейшее увеличение линейного участка, показателя линейности, повышение точности, повторяемости, надежности, развитие адаптационных признаков к конкретным условиям работы, упрощение конструкции, технологии сборки и монтажа достигаются с использованием современной элементной базы программируемых ИС, текущее состояние которой отражено в таблицах 1 и 2.
Исходя из анализа доступной элементной базы следует указать, что предлагаемый датчик ориентирован, прежде всего, на использование программируемых ИС, но не исключает возможность применения стандартных линейных датчиков. В этом случае будет требоваться не только более тщательный расчет, настройка и регулировка магнитной системы, но и, вероятно, могут последовать изменения в конструкции датчика.
Как минимум, при использовании интегральных датчиков Холла, предназначенных для поверхностного монтажа, потребуется выполнить разворот платы 5 и монтажных участков контактов 6 на 90°. В этом случае магнитопровод 8, например, может быть приклеен с обратной стороны платы 5.
При использовании более слабого магнита (порядка 300 мТл) небольших размеров возможно увеличение площади платы 5 и включение в конструкцию дополнительных корпусных деталей, магнит может быть кольцевым или эллиптическим, с большим радиусом внешней поверхности и т.д. Следует отметить, что хотя в заявляемом датчике могут использоваться магниты из любых материалов (Алнико, ферриты, SmCo или NdFeB), в автомобильных системах с повышенной рабочей температурой наиболее предпочтительным материалом является SmCo, имеющий лучшие свойства температурной стабильности.
В то же время эти возможные изменения не являются принципиальным изменением существа заявляемого датчика, отражающего, в первую очередь, введение в магнитную систему на эффекте Холла, описанную выше, аксиального ферромагнитного концентратора, и, вторично, развитие адаптационных признаков устройства к конкретным условиям работы через механику и схемотехнику (программирование) датчика.
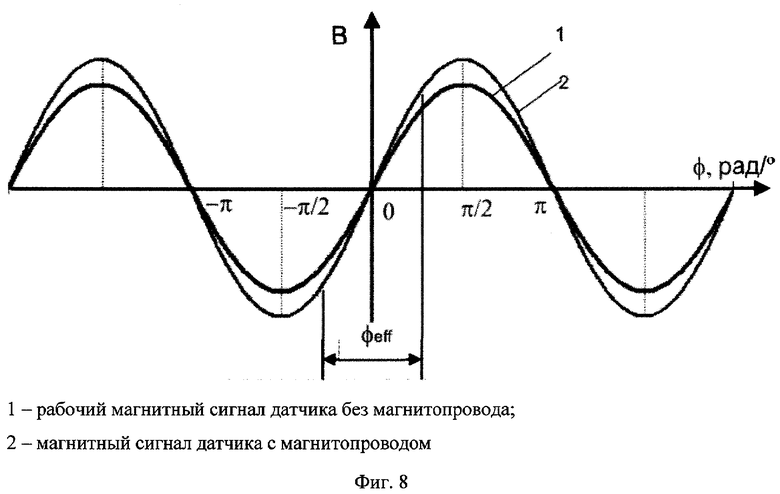
Введение ферромагнитного концентратора позволяет увеличить магнитную чувствительность датчика (крутизну магнитного сигнала) и, за счет этого, расширить линейный участок функционального диапазона измеряемого угла до 120-ти механических градусов. По сравнению с магнитной системой, описанной выше, но без магнитопровода, введение концентратора означает увеличение амплитуды рабочего магнитного сигнала, при сохранении той же однородности и формы синусоидального рабочего сигнала, и, как следствие, его большую помехоустойчивость, увеличение надежности, повышение точности измерений, показателя линейности (абсолютных и относительных показателей, повторяемости). Конструкция заявляемого устройства позволяет использовать для расположения аксиального элемента Холла большее постоянное расстояние от магнита, которое с использованием элементной базы программируемых ИС Холла является практически произвольным, то есть определяемым целиком из конструктивных соображений, что означает дальнейшее упрощение конструкции устройства и технологии его сборки и монтажа, и вместе с использованием различных вышеперечисленных механических средств, предложенных в конструкции датчика, - развитие адаптационных признаков к конкретным условиям работы.
Технические характеристики ряда известных линейных ИС Холла
(2,25 2,75)
(7,5 17,5)
(2,425 2,575)
-40...150 (L)
-40...125 (К)
(MLX90242LU А-СС03; MLX90242LV А-СС03; MLX90242ES 0-ВС03; MLX90242ES 0-СС03
(MRLc улучшенными характеристиками)
(2,25...2,75)
(22,5...27,5)
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С ЛИНЕЙНЫМ УГЛОВЫМ ДИАПАЗОНОМ В ПРЕДЕЛАХ 360 ГРАДУСОВ | 2005 |
|
RU2313763C2 |
| ПРОГРАММИРУЕМЫЙ БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С ЛИНЕЙНЫМ УГЛОВЫМ ДИАПАЗОНОМ В ПРЕДЕЛАХ 360° | 2006 |
|
RU2317522C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ПЕДАЛИ | 2005 |
|
RU2301399C2 |
| БЕСКОНТАКТНЫЙ ПРОГРАММИРУЕМЫЙ ДАТЧИК АБСОЛЮТНОГО УГЛОВОГО ПОЛОЖЕНИЯ В 360° | 2006 |
|
RU2312363C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ АВТОМОБИЛЯ | 2004 |
|
RU2270452C2 |
| Бесконтактный истинно двухосевой датчик угла поворота вала | 2014 |
|
RU2615612C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ АВТОМОБИЛЯ | 2004 |
|
RU2260188C1 |
| Бесконтактный датчик линейных перемещений | 1990 |
|
SU1786545A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2005 |
|
RU2378613C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2010 |
|
RU2462724C2 |




Предложенное изобретение может быть использовано в электронных системах управления автомобилем для определения угла открытия дроссельной заслонки, степени нажатия педали акселератора и т.д. Данное изобретение направлено на решение следующих задач: повышение точности измерений, увеличение чувствительности, расширение функционального диапазона измеряемого угла, увеличение линейного участка, а также упрощение конструкции устройства и технологии его сборки и монтажа. Бесконтактный датчик положения дроссельной заслонки включает в себя ротор из материала, не проводящего магнитное поле, с расположенным на его поддерживающем основании постоянным магнитом, и статор, представляющий собой линейный магниточувствительный элемент Холла. При этом элемент Холла установлен на постоянном расстоянии от магнита с возможностью программирования его выходной характеристики после сборки всего датчика, включая чувствительность, среднеквадратическое напряжение, ограничительные уровни напряжения на границах измеряемого угла. В состав датчика дополнительно введены механические ограничители максимально измеряемого угла, расположенные в корпусе и роторной части датчика, с обратной стороны элемента Холла в рабочей части датчика установлен аксиальный ферромагнитный концентратор нормальных составляющих силовых линий магнитного поля - магнитопровод, вне рабочей зоны бесконтактного взаимодействия вращающегося магнита и элемента Холла установлена цилиндрическая или коническая возвратная пружина кручения для противодействия вращательному движению вала управляющего привода. 3 з.п. ф-лы, 10 ил., 2 табл.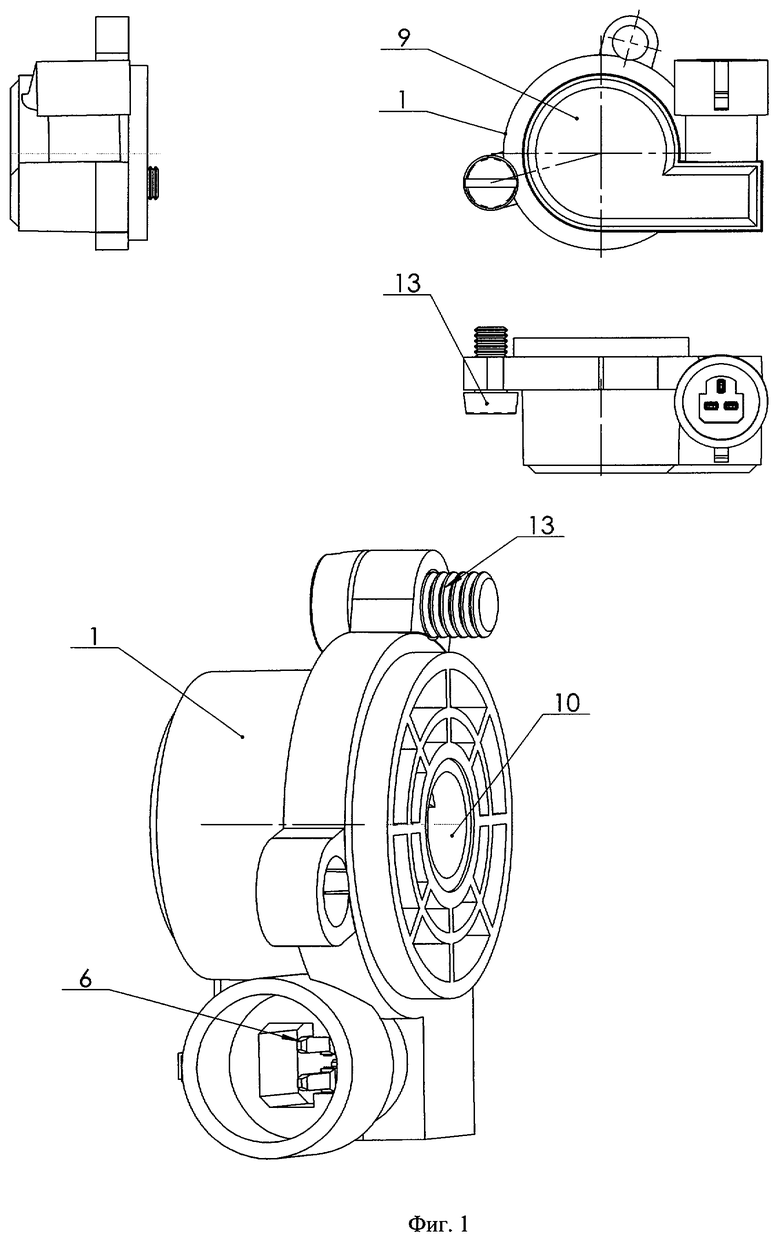
| US 6534971 B1, 18.03.2003 | |||
| US 5014005 А, 07.05.1991 | |||
| US 5093617 А, 03.03.1992 | |||
| DE 19739682 A1, 11.03.1999 | |||
| RU 97117901 А, 20.08.1999 | |||
| US 4887572 А, 19.12.1989 | |||
| Дискретный преобразователь угла поворота | 1990 |
|
SU1768951A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2191347C2 |
| US 5444369 А, 22.08.1995 | |||
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2004 |
|
RU2262659C1 |

