Предлагаемая система относится к области систем автоматического управления.
Известны следящие системы с электродвигателями постоянного тока и релейными усилителями мощности, контакты которых подключают к двигателю резисторы динамического торможения, чем достигается приближение переходного процесса к оптимальному.
Предложенное устройство отличается от известных тем, что в следящей системе установлены включенный в иеиь управления двигателя датчик тока из последовательно соединенных трансформатора, выпрямителя и конденсатора, и подсоединенный к выходу датчика блок электродинамического торможения, включающий последовательно связанные триггер Шмидта с усилителем, формирователь импульсов и два тиристора, подключенные встречно-параллельно к обмотке управления электродвигателя.
Это дает возможность повысить надежность работы устройства.
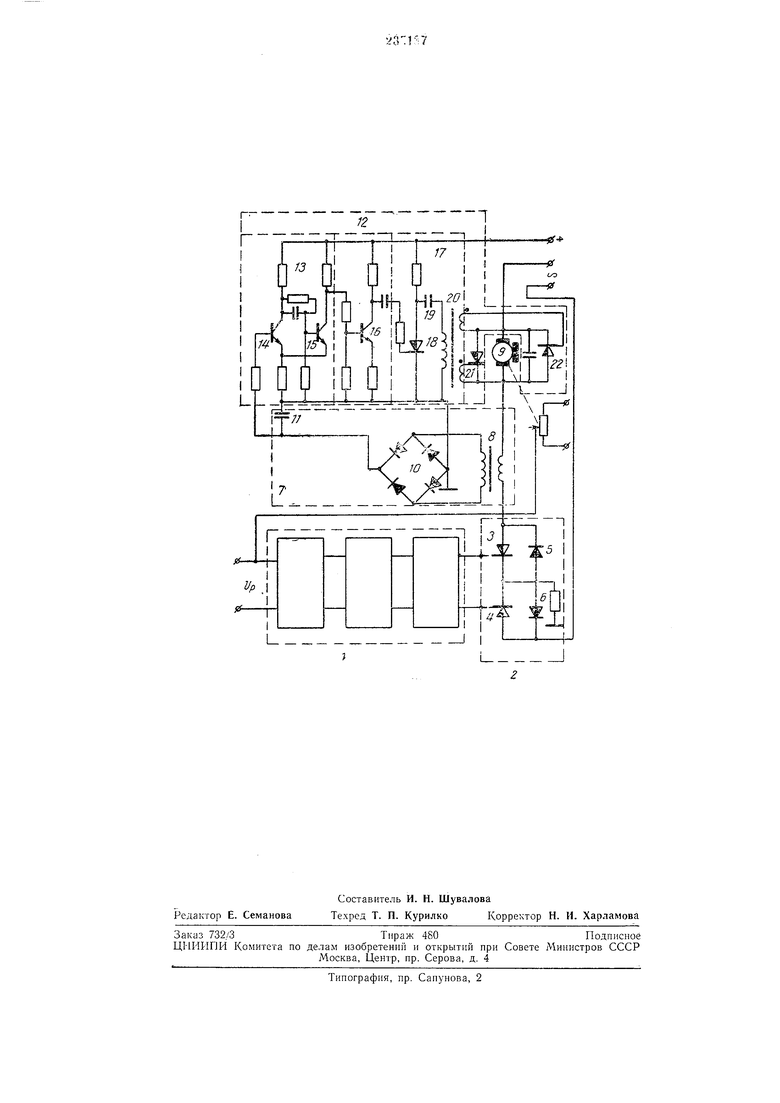
Па чертеже представлена принципиальная схема устройства.
Устройство содержит усилитель 1 постоялиото тока, состоящий из модулятора, усилителя и демодулятора; релейный усилитель 2 мощности, состоящий из тиристоров 3 и 4 и веити.тей 5 и б; датчик 7 тока, состоящий из трансформатора S (иервичиая обмотка которого включена последовательно в цепь управления двигателем 9), диодного моста 6, интегрирующего конденсатора 77; блок У2 электродинамического торможения (ЭДТ), состоящий из триггера Шмидта 13 (транзисторы 14 и /5), согласующего усилителя (транзистор 16), формирователя импульсов управления 17 (тиристор 18, конденсатор /Я трансформатор 20), шунтирующих тиристоров 21 и 22, включенных между собой встречно-параллельно.
Управляемые электроды тиристоров 3 и 4, относящихся к релейному усилителю 2 мощности, соединены с выходом усилителя 1. Выход датчика 7 тока соединен с триггером Шмидта 13. Шунтирующие тиристоры 21 и 22 управляемыми электродами включены во вторичные обмотки трансформатора 20.
Следящая система работает следующим образом.
При отсутствии напряжения рассогласовання Up на входе усилителя 1 на его выходе сигнал равен нулю, тиристоры 3 н 4 тока не пропускают и двигатель 9 не вращается. На выходе датчика 7 напряжение отсутствует и триггер 13 блока ЭДТ занимает исходные положения (транзистор /- закрыт, транзистор 15 открыт). Транзистор 16 согласующего каскада закрыт. На выходе маломощного тиристора 18 сигнал отсутствует, конденсатор А9 заряжается через первичную обмотку гранеформатора 20. Тиристоры 21 и 22 закрыты. При появлении сигиала рассогласования V на входе зсилителя /на его выходе ноявляется ностоянное напряжение, тиристор 3 или 4 пробивается, и через двигатель 9 протекает ток определенного направления, зависящего от полярности сигнала рассогласования. Во вторую обмотку трансформатора 8 трансформируются имиульсы вследствие наличия переменной составляющей тока управления. Благодаря ирименению диодного моста 10 на конденсатор // поступают положительные импульсы ири любой полярности напряжения на двигателе. Конденсатор 11 создает определенный уровень постоянного напряжения, достаточный для срабатывания триггера 13 и приведения в состояние готовности всего блока ЭДТ.
Как только система отработает заданное рассогласование и напряжение рассогласования и у станет меньше зоны нечувствительности, тиристор 3 или 4 выключается, цепь питания обесточивается, паиряжение датчика 7 исчезает, транзисторы 14, 15 и 16 скачком возвращаются в исходное положение.
Тиристор 18 пробивается, конденсатор 19 разряжается и в первичной обмотке трансформатора 20 формируется управляющий импульс.
Трапсформируемый во вторичные обмотки импульс управления пробивает один из шунтирующих тиристоров (21 или 22). Двигатель эффективно тормозится при любой полярности питающего напряжения. Запаздывание во включеиии шунтирующих диодов не превышает одного периода питающего напряжения.
Таким образом, применение в релейном усилителе мощности на управляемых диодах схе1 1Ы электродинамического торможения с двумя тиристорами, шунтирующими электродвигатель при ирохождении системой зоны нечувствительности, обеспечивает быстродействующее, бесконтактное шунтирование электродвигателя при любой полярности напряжения и сокращает время иереходиого ироиесса и перерегулирование в следящей системе.
Использование в качестве датчика тока в цеии питания электродвигателя импульсного траисформатора с диодным мостом во вторичной обмотке и иитегрирующей емкостью позволяет очень точно определять момент включения блока ЭДТ.
Предмет изобретения
Квазиоптимальная следящая система, содержащая электродвигатель и релейный усилитель мощности на тиристорах, отличающаяся. тем, что, с целью иовышения надежности системы, в ней установлены включенный в цепь управления двигателя датчик тока из последовательно соединенных трансформатора, выпрям ггеля и конденсатора и подсоединенный к выходу датчика блок электродинамического торможения, включающий последовательно связанные триггер Шмидта с усилителем, формирователь импульсов и два тиристора, подключенные встречно-параллельно к обмотке управления электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Быстродействующая следящая система | 1973 |
|
SU479081A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯКРОМКИ ТКАНИ | 1971 |
|
SU420526A1 |
| Электроконтактный уровнемер электропроводной жидкости | 1975 |
|
SU574624A1 |
| Устройство для заряда аккумуляторной батареи транспортного средства | 1986 |
|
SU1427483A1 |
| УСТРОЙСТВО для ПЛАВНОГО АВТОМАТИЧЕСКОГО | 1969 |
|
SU253110A1 |
| ОДНОФАЗНЫЙ ВЫПРЯМИТЕЛЬ ДЛЯ ДУГОВОЙ СВАРКИ | 2010 |
|
RU2441734C1 |
| Стабилизированный источник постоянного тока | 1973 |
|
SU731429A1 |
| УСТРОЙСТВО КОМПЛЕКСНОЙ ЗАЩИТЫ ЭЛЕКТРОТЕХНИЧЕСКОЙ СИСТЕМЫ | 1995 |
|
RU2115986C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1997 |
|
RU2123230C1 |