Изобретение относится к области вельского хозяйства и предназначено, в частности, для эксплуатационных испытаний тра-кторов и других сельхозмашин.
Известны устройства для бесконтактного измерения траектории самоходной машины, используемые для исследования ее устойчивости и управляемости, содержаш,не индукционные датчики, установленные на корпусе машины, и опорную линию, заданную токонесущим проводом, расположенным над (под) поверхностью движения. В таких устройствах точность измерения зависит от стаб льности амплитуды переменного тока в опорном токонесущем проводе, а та:кже от стабильности глубины залегания этого провода лл); высоты индукционного датчика относительно провода.
В предложенном устройстве устранена зависимость измерения от нестабильности тока в опорном проводе и случайных изменений высоты рамок-датчиков.
Это достигнуто тем, что з нем установлен дополнительный амплитудно-фазовый детектор, питаемый от линейного усилителя сигнала вертикальной рамки и усилителя-ограничителя, выход которого через вычитающее устройство с фиксированным Бычитаемы,т }:апряжением соединен со входом частотно-ил1пульсного модулятора, запускающего широтно-импульсный модулятор, ВХОД которого через вычитающее устройство с фиксированным вычитаемым :напряже}1){ем соединеи с выходом основного амплитудно-фазового детектора.
Поскольку выходной с;1гнал иредлагаемого устройства имеет вид импульсов с перемепиой дльтельностью и частотой повторения (широтно-импульсная и частотно-импульсная модуляция), возможна прямая запись этого сигнала на ленту, что является дополнительным преимуществом перед известным индукц юнным траектографом.
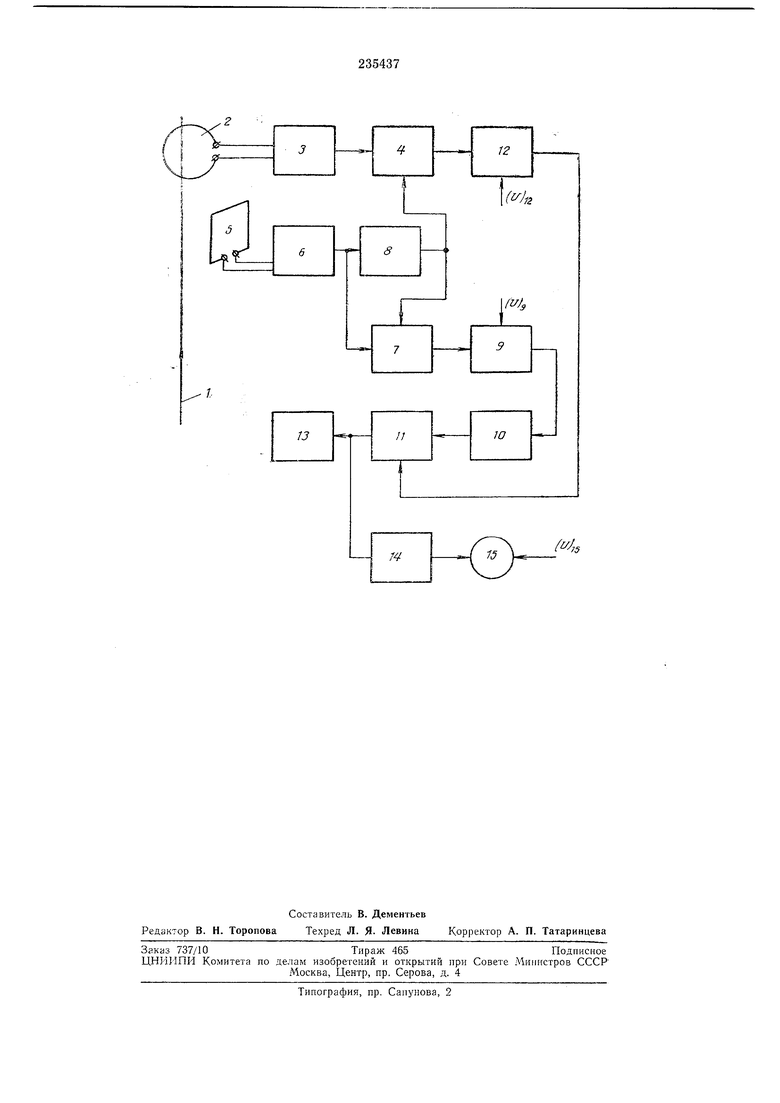
Па чертеже показана блок-схема иредлагаемого устройства.
Опорная траектория задана на поверхности движения токонесущим проводом 1, в котором течет переменный ток ( /-sin(o/, где / - амплитуда тока, со - частота, / - время. Измеряемое отклонение ло некоторой точки О
корпуса самоходной машины отиосите.чьно опорного провода / определяется с помощью датчика 2, который представляет собой кольцевую горизонтальную рамКу, содержащую n-i витков провода, уложенного по окружности с
диаметром D-2. Плоскость этой окружности параллельна иоверхности движения.
огда л;| 0 проекция 1;ентра рамки (датчика 2 на плоскость движения совпадает с проекцией провода / на ту же плоскость, то
пряжения равна нулю. Еслл же О, то , .причем в зависимости от знака фаза
180°, т. е.
изменяется на
этого напряжения соз((;оН-я) /a /is-COSCO/ при Xt)Q и при . Зависимость E f(xo) достаточно линейна при условии, что
.voi 0,4 К 0,25Д.2 + л,
где h-высота рамки датчика 2 относительно ировода 1.
Полученный в датчике 2 сигнал усиливается в /Сз раза с помощью усилителя 3 и подается в амилитудно-фазовый детектор 4.
Детектор получает необходн.мое опорное напряжение неизменной фазы и амплитуды следующим образом. На самоходной хмашине устанавл.ивают второй индукционный датчик 5, представляющий собой вертикальную рамку, содержащую /is витков ировода, уложенного по периметру прямоугольника, плоскость которого перпендикулярна плоско,сти движения и параллельна оси опорного провода 1.
Амплитуда 5 напряжения, индуктируемого в датчике 5 магнитным полед тока, протекающего в Проводе 1, в определенных пределах практически не зависит от величины отклонения Ао, а фаза этого напряжеиия остается неизменной при изменении знака .хо.
После усиления и формирования с помощью усилителя-ограничителя 6 данное напряжение может служить опорным для фазового детектора 4, поскольку имеет такую же частоту, как напряжение на выходе усилителя 5, будучи неизменным по фазе и амплитуде.
Сигнал /5 датчика 5 усиливается в /(с раз с помощью линейного усилителя 6 и детектируется фазовым детектором 7, получающим опорное напряжение от усилителя 8. Полученное на выходе детектора 7 напряжение Uимеет неизменную полярность, поскольку фаза сигнала /s не зависит от знак-а х.
Если амплитуда тока / в опорном проводе получает случайное приращение Д/, то благодаря линейности усилителей 3 и 6 и детекторов 4 и 7 относительные значения п|)иращеипй сигналов /4 и U-; будут одинаковы, т. е. да, , t/4
То же самое будет иметь место п)и c.iy4aiiиом изменении (в ограниченных пределах) высоты h рамки провода / (например, ири переезде машины через неровность на поверхности движения).
Пспользование амплитудно-фазовых детекторов в опорном п сигнальном каналах значительно повышает помехоустойчивость устройства, поскольку ослабляет его восприимчивость к несинхронным иомехам.
Таким образом, величина отногнеиия двух сигналов остается иостоянной ири случайных изменениях / и /. В то же время величииа Дц будет линейно меияться в за зисимости от значения ло, поскольку и х.д, тогда как 67 const (ло).
Остальиые элементы схемы служат для получения импульсного сигнала, пропорционального .
Выходное напряжение Li детектора 7 подается на вход суммирующего устройства 9, на второй вход которого подается постоянное опорное напряжение отрицательной полярности (L)g. Выходной сигнал устройства 9: Оч (L/)9+L7, или с учетом полярности сигналов U - {U), + Uj. Если {U),U-, то с ростом (L) выходной сигнал устройства 9 уменьшается ио абсолютной величине.
Этот сигнал подается иа вход частотно-импульсного модулятора (преобразователя 10), имеющего характеристику
у, 111
Кю - (U), + t/,
ATi,
и,,
где 7„ - -период повторения импульсов
выходного напряжения преобразователя 10.
Выходное импульсное напряжение преобразователя 10 с частотой Р„ используется для запуска устройства 11, представляющего собой преобразователь напряжения в интервал времени (широтио-импульсиый модулятор), выполненный по известной схеме.
Входным сигналом для устройства // служит напряжение, снимаемое с выхода суммирующего устройства 12, на один вход которого иодается напряжение t/.} из фазового детектора, а на другой - ностоянное онорное напряжение отрицательной полярности 6. Тогда Li2 -()i2+(). В результате
входной сигиал широтно-импульсного модулятора будет иметь неизменную полярность при
условии, что ()l2(4).
Выходной сигнал этого модулятора представляет собой пмпульсиое напряжение с частотой повторения Г„ и длительностью T (i (6)io+(гГ:Ь.|). Данный сигнал записывается на магнитную ленту с иомо1цью 1агнитофона 13.
Одновременно тот же сигнал нодается в визуа.тьиьп ипдикатор отклонений от опорной траектории, который содержит диодный интегратор 14 и Вольтметр 15, иоказывающий средисс зпачеиие выходного 1апряже}1ия устройства 11.
AF -
известно U,
вых- ср - иу,
II
где /1-ам11Л1гг да имнульсов, F -частота их повторения, 55т-длительность импульсов.
В описываемом устройстве /l const (л ) Тогда
,П и-А}-Г-} -К (6),2 (:i..)
60 С/аых. ср - - / (у- i - м и II /AIIJ 1 и )f - -
следовательно Ьвых-ср будет пропорциоиальная тем, что Г, и , при л;о1 0 компенсируется постоянным напряжением (U)wТаким образом, выходной сигнал индикатора (подобный же индикатор используется и при воспроизведении магнитной записи в лабораторных условиях) будет проиорционален отклонению самоходной машины от опорной траектории.
Из полученного результата также видно, что случайные колебания амплитуды тока в токонесущем опорном проводе, как и случайные колебания высоты датчика 2, «е будут влиять на результат измерения, т. е. на величину Ло. Не будут также влиять на точность измерения случайные (например, температурные) колебания коэффициентов усиления /Сз и Дв, если их приращения при изменении температуры или питающего напрян ения будут иметь одинаковые знаки и относительные значения.
Вместе с тем, точность регистрации сигнала на магнитной ленте не будет зависеть от случайных колебаний ее нараметров н даже скорости ее движения Уд (поскольку с изменением в ограниченных пределах Кд изменяются Т„ и т так, что их отношение остается неизменным).
Предмет изобретения
Устройство для измерения траектории самоходной машины, содержащее опорный токонесущий провод, горизонтальную и вертикальную paNnvi-датчики с соответствующими линейиы.ми усилителями, усилитель-ограничитель сигнала вертикальной рамки-датчика и амплитудно-фазовый детектор, питаемый линейным усилителем сигнала горизонтальной рамки и усилителем-ограничителем, отличающееся тем, что, с целью устранения зависимости измерения от нестабильности тока в опорном проводе и случайных изменений высоты рамок-датчиков, оно снабл ено дополнительным амплитудно-фазовым детектором, питаемым от лине1шого усилителя сигнала вертикальной рамки и усилителя-ограничителя, выход которого через вычитающее устройство
с фиксированным вычитаемым напряжением соединен со входом частотно-импульсного модулятора, запускающего широтно-имнульсный модулятор, вход которого через вычитающее устройство с фиксированным вычитаемым наиря}кением соединен с выходом основного амплитудно-фазового детектора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ КОЛЕСНОЙ МАШИНЫ | 1969 |
|
SU249110A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ОТКЛОНЕНИЯДВИЖЕНИЯ САМОХОДНОЙ МАШИНЫ ОТНОСИТЕЛЬНОБАЗОВОЙ ЛИНИИ | 1972 |
|
SU422955A1 |
| ФАЗОВРАЩАТЕЛЬ СИГНАЛА ТРЕУГОЛЬНОЙ ФОРМЫ | 2015 |
|
RU2568771C1 |
| РЕЖИМОМЕТРИЧЕСКИЙ ТРАЕКТОГРАФ ДЛЯ ПОЛУЧЕНИЯ | 1969 |
|
SU238807A1 |
| Устройство для импедансного диэлектрического каротажа | 1983 |
|
SU1092376A1 |
| ИСТОЧНИК ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ | 1995 |
|
RU2074492C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ СИСТЕМ | 1971 |
|
SU312560A1 |
| Усилитель мощности | 1983 |
|
SU1133649A1 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОДЗЕМНЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ | 2002 |
|
RU2233460C1 |
| Широтно-импульсный модулятор канала усилителя класса D | 2022 |
|
RU2796945C1 |