1
Изобретение относится к приборостроению, в частности к устройствам для измерения угла отклонения движения самоходной машины, например трактора, относительно базовой линии, то есть угла между продольной осью симметрии машины и заданным ей извне произвольным направлением движения (прямой и непрямой базовой линий).
Известны устройства для измерения угла отклонения движения самоходной машины относительно базовой линии, содержандио резонансно-индукционные датчики с ферромагнитными сердечниками, взаимодействуюш,ие с магнитным полем опорного провода, питаемого генератором постоянного тока, следящую систему с входным усилителем и амплитудно-фазовым детектором, соединенным через корректирующий элемент с выходным усилителем.
Однако известные устройства недостаточно точны ввиду зависимости показания от нестабильности и нелинейности характеристик датчиков и усилителей, нестабильности коэффициентов усиления усилителей и амплитуды переменного тока в опорной линии, а также углов крена и дифферента трактора.
Для повыщения точности измерения индукционные датчики расположены в плоскости, параллельной поверхности движения машины, и установлены на общей нланке, соединенной
с индикаторным прибором и приводимой от исполнительного элемента следящей системы, которая снабжена вычитающим элементом, включенным между индукционными датчиками и входным усилителем системы.
С целью сохранения точности измерений при переезде машины через участок с переменным уклоном планка с индукционными датчиками установлена на высоте, равной высоте размещения опорного провода, причем ферромагнитные сердечники датчиков сориентированы периепдикулярно к поверхности движения мащины.
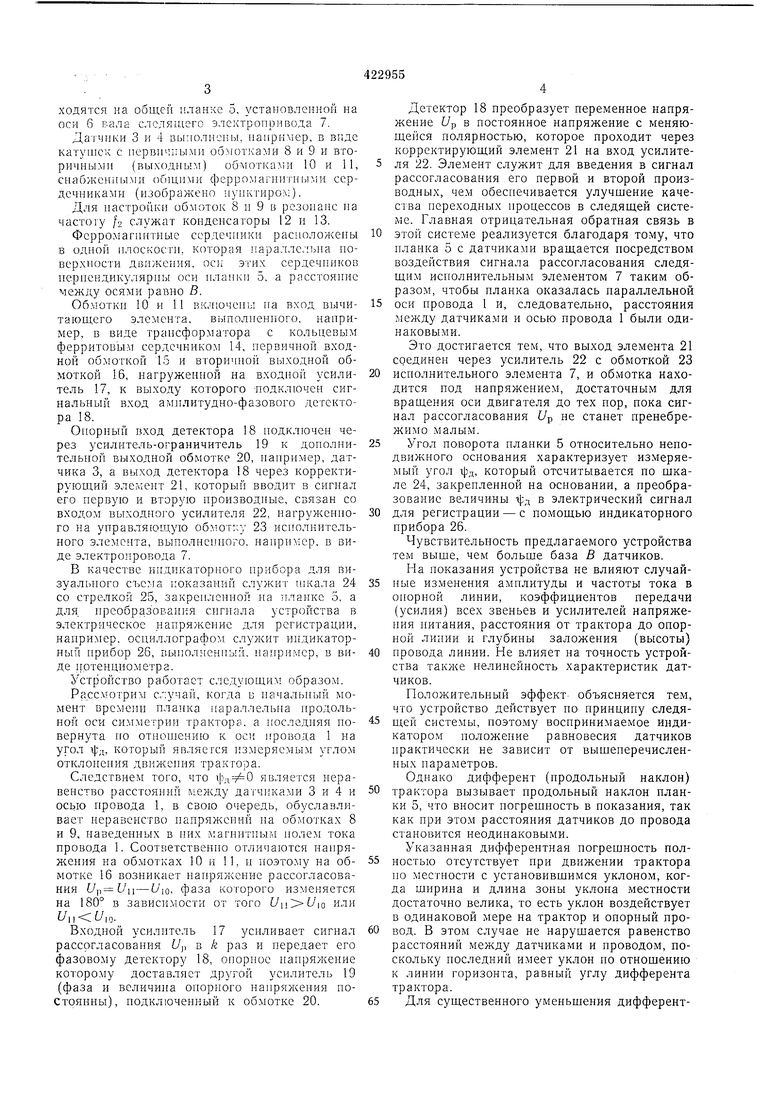
На фиг. 1 и 2 изображена кинематическая и электрическая схемы предлагаемого устройства.
Базовой линией служит лежащий на почве или под нею нровод 1 в изоляции, подключенный одним концом к выходному зажиму генератора 2 переменного тока (частота тока равна fz), а другим - к заземлению, с которым соединен также второй залшм генератора 2. Провод 1 можно укладывать вдоль базовой
линии нроизвольной формы.
Остальные элементы устройства помещаются на испытуемом тракторе. Для восприятия магнитного поля тока, протекающего по проводу 1, служат два одинаковых резонансно-индукционных датчика 3 и 4, которые находятся на общей планке 5, установленной на оси 6 рала следящего электропривода 7.
Датчики 3 и 4 аыиолнсны. наирнмер, в виде катуи1ек с первичными обмотками 8 и 9 и вторичными (выходным) обмотками 10 и 11, снабженными общими ферромагнитными сердечннкамн (изображено нунктнрол;).
Для настройки обмоток 8 и 9 в резонанс на частоту /2 служат конденсаторы 12 и 13.
Ферромагнитные сердечники расположены в одной плоскости, которая араллельна новерхиости движения, оси этих сердечников пернендикуляриы оси нланки 5, а расстояние между осями равно В.
Обмотки 10 и 11 включены на вход вычитающего элемента, выполненного, например, в виде трансформатора с кольцевым ферритовыд сердечником 14, нервичной входной обмоткой 15 и вторичной выходной обмоткой 16, нагруженной на входной усилитель 17, к выходу которого подключен сигнальный вход амплитудно-фазового детектора 18.
Онорный вход детектора 18 нодключен через усилитель-ограничитель 19 к дополнительной выходной обмотке 20, наиример, датчика 3, а выход детектора 18 через корректирующий элемент 21, который вводит в сигнал его нервую н вторую нроизводные, связан со входом выходного усилителя 22, нагруженного на управля ощ,ую обмот;;у 23 исполнительного элемента, выполненного, например, в виде электропровода 7.
В качестве индикаторного нрибора для визуал1)Ного съема показаний служит пьчала 24 со стрелкой 25, закренленной на планке 5. а для нреобразования сигнала устрсзйства в электрическое напрял-сение для регистрации, наиример. осциллографом служит индикаторный нрибор 26, вынолненный, например, в виде потенциометра.
Устройство работает следующим образом.
Рассмотрим случай, когда в начальный момент времени илаика иараллельиа продольной оси симметрии трактора, а последняя новернута но отношению к оси ировода 1 на угол г|-д, который является измеряемым углом отклонения движения трактора.
Следствием того, что является неравенство расстояний между датчиками 3 и 4 и осью нровода 1, в свою очередь, обуславливает неравенство иапряжеиий на обмотках 8 и 9, наведенных в них магнитным нолем тока нровода 1. Соответственно отличаются наиряжения на обмотках 10 и 11, и поэтому на обмотке 16 возникает нанряжение рассогласования L/|-i Ln-UIQ, фаза которого изменяется на 180° в зависимости от того или ,o.
Входной усилитель 17 усиливает сигнал рассогласования 6j, в k раз и передает его фазовому детектору 18, онорное нанряжение которому доставляет другой усилитель 19 (фаза и величина опорного напряжения ноСтоянны), нодключенный к обмотке 20.
Детектор 18 иреобразует неременное напряжение Ур в постоянное напряжение с меняющейся полярностью, которое нроходит через корректирующий элемент 21 на вход усилителя 22. Элемент служит для введения в сигнал рассогласования его первой и второй производных, чем обеснечиваегся улучщение качества нереходных нроцессов в следящей системе. Главная отрицательная обратная связь в
этой системе реализуется благодаря тому, что нланка 5 с датчиками вращается носредством воздействия сигнала рассогласования следящим иснолнительным элементом 7 таким образом, чтобы нланка оказалась нараллельной
оси нровода 1 и, следовательно, расстояния между датчиками и осью нровода 1 были одинаковыми.
Это достигается тем, что выход элемента 21 соединен через усилитель 22 с обмоткой 23
исполнительного элемента 7, и обмотка находится нод напряжением, достаточным для вращения оси двигателя до тех нор, пока сигнал рассогласования 17р не станет пренебрежимо малым.
Угол поворота нланки 5 относительно ненодвижного основания характеризует измеряемый угол 1|)д, который отсчитывается по шкале 24, закренленной на основании, а преобразование величины ij;,-, в электрический сигнал
для регистрации - с помощью индикаторного нрибора 26.
Чувствительность предлагаемого устройства тем выще, чем больще база В датчиков. На показания устройства не влияют случайные изменения амплитуды и частоты тока в опорной линии, коэффициентов передачи (усилия) всех звеньев и усилителей напряжения нитания, расстояния от трактора до опорной линии и глубины заложения (высоты)
нровода линии. Не влияет на точность устройства также нелинейность характеристик датчиков.
Положительный эффект объясняется тем, что устройство действует но нринципу следящей системы, поэтому воспринимаемое индикатором положение равновесия датчиков практически не зависит от выщенеречисленных нараметров. Однако дифферент (иродольный наклон)
трактора вызывает продольный наклон планки 5, что вносит погрещность в показания, так как при этом расстояния датчиков до провода становится неодинаковыми. Указанная дифферентная погрещность полностью отсутствует при движении трактора по местности с установившимся уклоном, когда ширина и длина зоны уклона местности достаточно велика, то есть уклон воздействует в одинаковой мере на трактор и опорный нровод. В этом случае не нарущается равенство расстояний между датчиками и нроводом, поскольку носледний имеет уклон но отношению к линии горизонта, равный углу дифферента трактора.
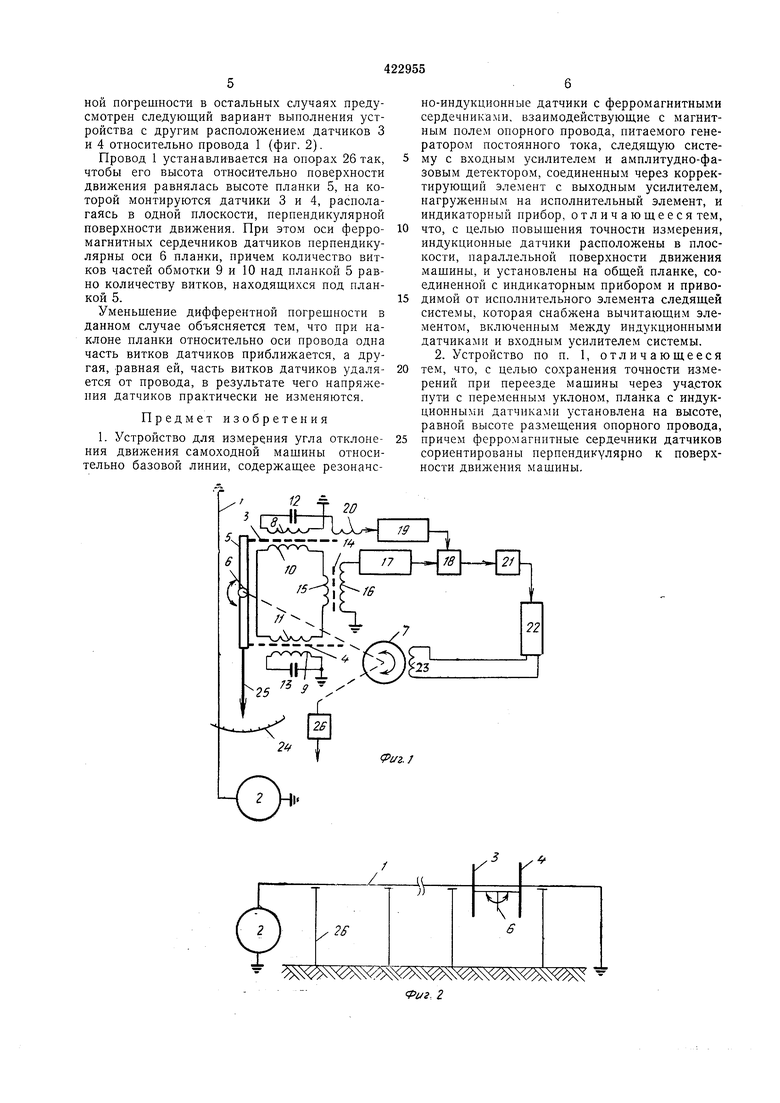
Для существенного уменьшения дифферентной погрешности в остальных случаях предусмотрен следующий вариант выполнения устройства с другим расположением датчиков 3 и 4 относительно провода 1 (фиг. 2).
Провод 1 устанавливается на опорах 26 так, чтобы его высота относительно поверхности движения равнялась высоте планки 5, на которой монтируются датчики 3 и 4, располагаясь в одной плоскости, перпендикулярной поверхности движения. При этом оси ферромагнитных сердечников датчиков перпендикулярны оси 6 планки, причем количество витков частей обмотки 9 и 10 над планкой 5 равно количеству витков, находящихся под планкой 5.
Уменьшение дифферентной погрешности в данном случае объясняется тем, что при наклоне планки относительно оси провода одна часть витков датчиков приближается, а другая, равная ей, часть витков датчиков удаляется от провода, в результате чего напряжения датчиков практически не изменяются.
Предмет изобретения
1. Устройство для измерения угла отклонения движения самоходной машины относительно базовой линии, содержащее резонанс/ 4 пH
V-Oi..-- L
но-индукционные датчики с ферромагнитными сердечниками, взаимодействующие с магнитным полем опорного провода, питаемого генератором постоянного тока, следящую систему с входным усилителем и амплитудно-фазовым детектором, соединенным через корректирующий элемент с выходным усилителем, нагруженным на исполнительный элемент, и индикаторный прибор, отл ич а ющееся тем,
что, с целью повышения точности измерения, индукционные датчики расположены в плоскости, параллельной поверхности движения машины, и установлены на общей планке, соединенной с индикаторным прибором и привоДИМОЙ от исполнительного элемента следящей системы, которая снабжена вычитающим элементом, включенным между индукционными датчиками и входным усилителем системы. 2. Устройство по п. 1, отличающееся
тем, что, с целью сохранения точности измерений при переезде мащины через участок пути с переменным уклоном, планка с индукционными датчиками установлена на высоте, равной высоте размещения опорного провода,
причем ферромагнитные сердечники датчиков сориентированы перпендикулярно к поверхности движения машины.
п
Pif2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения трактора на винограднике | 1961 |
|
SU149119A1 |
| УСТРОЙСТВО для АВТОВОЖДЕНИЯ ТРАКТОРНОГО АГРЕГАТА | 1973 |
|
SU382368A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНЫХ МАШИН ПО ТОКОНЕСУЩЕМУПРОВОДУ | 1972 |
|
SU345890A1 |
| Устройство для регулирования положения рабочего органа дорожной машины | 1985 |
|
SU1247474A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ДОЖДЕВАЛЬНЫХ И ПОЛИВНЫХ АГРЕГАТОВвсЕСсюгнАя ПДТЕЙТ110-ТЕУ1Ш'{101?^ | 1972 |
|
SU327891A1 |
| Следящий привод | 1974 |
|
SU482717A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ КОНТУРА ПАЦИЕНТА ПРИ УВЧ-ТЕРАПИИ | 1992 |
|
RU2012379C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ ТРАКТОРА | 1968 |
|
SU231918A1 |
| Автокомпенсационный измерительплОТНОСТи TOKA B элЕКТРОлиТЕ | 1975 |
|
SU813273A1 |
