Известны пневматические устройства для дистанционного управления судовым двигателем, содержащие командные механизмы, соединенные трубопроводами с сумматором и логическими блоками переключения командных механизмов и подачи топлива, связанными с исполнительными механизмами и получаюи нми импульсы от датчика числа оборотов и сигнализаторов параметров.
Такие устройства обеспечивают дистаннионный автоматизированный пуск двигателя, рсfeepc, управление иодачей топлива при измсИении режимов, остановку двигателя с одного или нескольких дистанционных постов yinpaBдения. Они управляют двигателем либо через всережимный регулятор оборотов, либо путем непосредственного воздействия на исполнительный механизм подачи топлива.
В последнем случае в систему у|правления следует вводить устройства, исключающие статическую работу двигателя в зоне критических чисел оборотов при любом положении задающей рукоятки командного механизма, который удален от двигателя на значительное расстояние, в связи с чем оператор не может следить за уровнем крутильных колебаний гребного вала.
работа в зоне исключается путем звуковой или световой сигнализации о соответствующем положении рукоятки управления (при использовании всережимного астатического регулятора это возможно).
В предлагаемом устройстве на выходе датчика числа оборотов установлен регулятор, поддерживающий число оборотов на границе зоны, который соединен со входом сумматора, получающего рсгулир юии1Й имплльс от блока подачи топлива.
На выходе датчика числа оборотов установлен механизм 1митации разгона двигателя, выполненньи в виде дифференцирующего зве-на, включаемый для проверки исправно.сти при неработающем двигателе.
Эти отличия позволяют исключить работу двигателя в зоне критического числа оборотов и самопроизвольное увеличение числа оборог тов, а также оперативно контролировать исправность логических блоков устройства перед включением в действие.
Помимо этого, предлагаемая система спаб-. жеиа устройством, позволяющим выполнить операции пуска и управления иодачей топлива, ие вводя в действие сам двигатель, т. е. в порядке реГхТаментного контроля исправностн системы при подготовке к выходу в море. Без такого устройства это. невозможно,. так как указанные операции во всех автолштизированных системах заоло.кировапы по фактическому числу оборотов коленчатого вала двигателя: если обороты не достигли пусковых, подача топл-ива не разрешается и т. п.
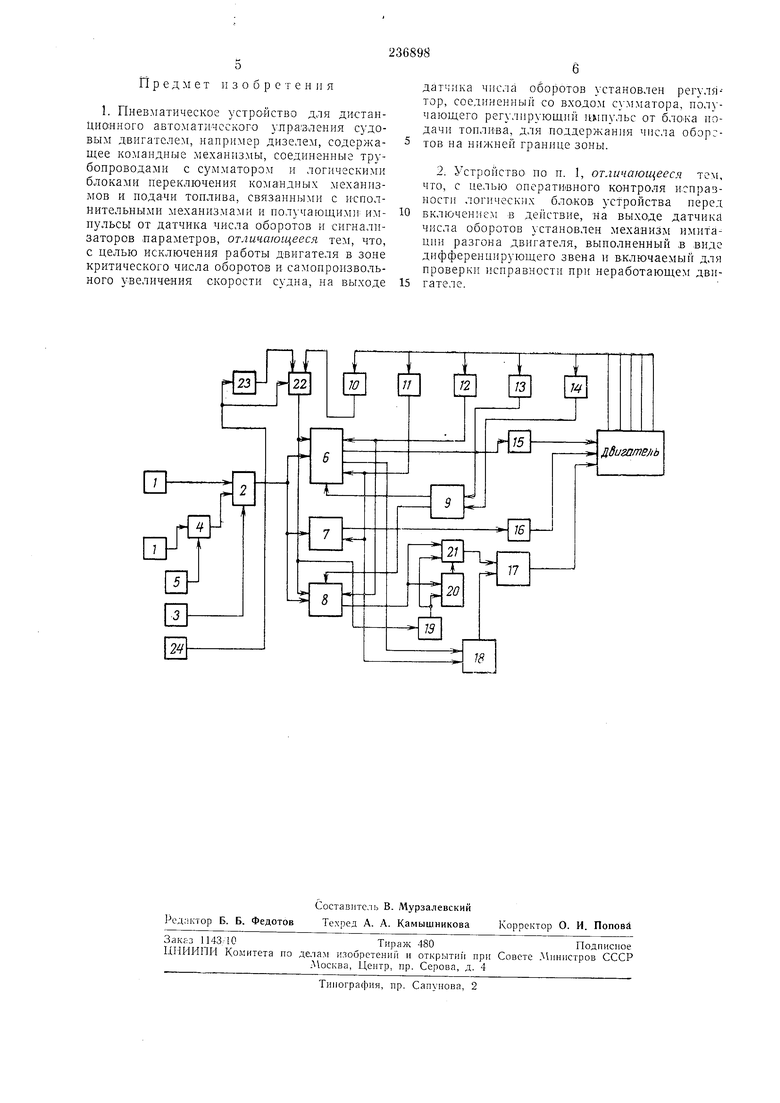
На чертеже представлена блок-схема устройства ДАУ.
Командные механизмы / соединены трубопроводами с блоком 2 переключения постов, который сообп1ается линиями связи с тумблером 3 переключения механизмов и узлом 4 блокировки-с машинным телеграфом 5. Воздушные трубопроводы от блока 2 проведены ко входны.м штуцерам логических блоков пуска 6, реверса 7 и подачи топлива 8, которые получают пневматические сигналы от координатора 9, датчиков 10 и 11 числа оборотов и положения рейки топливных насосов двигателя соответственно. К блокам 5 и 5 подведен выходной трубопровод от сигнализатОра 12 давления масла.
Сигналы реверсных «омаидных механ-измов 1 и сигнализаторов фактического положения органов реверса 13 и распределительных валов 14 подводятся ко входным штуцерам координатора 9, выходные трубонроводы которого подведен) к блокам пуска 6 и подачи топлива 8. Блоки 6, 7 и 8 соединены с соотвeтcтвy oш, исполнительными механизма и - пуска 15, реверса 16 и подачи топлива 17, которые механически связаны соответственно с главным пусковым клапаном, воздухораспределителем и рейкой топливных насосов двпгателя. Исполнительный механизм подачи топлива линиями связи соединен также с блоком 18 ускорения двпжения рейки, который действует при пуске и остановке двигателя и потому трубопроводами соединен с блока.ми пуска 6 и подачи топлива 8.
Штуцер для подвода регулируемой величины пневматического упифидированного. регулятора 19 соединен с выходным трубопроводом датчика 10 числа оборотов, а выходной нтуцер регулятора - с сумматором 20, установленным на трубопроводе между блоком подачи топлива 8 и исполнительным механизмом 17. Для подключения к исполнительному механизму выходных сигналов от сумматора 20 или от блока 8 на этом же трубопроводе установлен коммутатор 21, который также соединен с выходом регулятора. В выходной магистрали датчика числа оборотов 10 установлен второй коммутатор 22, .подкл Очаюш;ий к этой магистрали либо сам датчик, либо имитационное устройство 23. Входным сигналом для имитационного устройства и коммутатора 22 является сигнал от тумблера 24, имеюш,его два положения: «Контроль и «Работа.
Система действует следуюш,им образом.
После подключения тумблером 5 с помощью блока 2 одного из командных механизмов / к линиям задания режимов блоки 6, 7 м 8 последовательно воздействуют на соответствующие исполнительные механизмы. Механизм 16 реверсирует воздухораспределитель для пуска
двигателя в ну/кном направлении, механизм 15 открЕязает пусковой клапан, а механизм 17, управляе 1ый блокол 18, после разворота коленчатого вала на воздухе до nycKOBoii скорости, ОПределяемой датчиком 10, и реверсирования распределительных валов резко передвигает рейку тоилпвных насосов на почти полный ход. При достиже)1ии лшнимально устойчнвых оборотов но сигналам датчиком Ю
0 н 11 блок 18 отключается, а механизм 17 переходит па работу в следующем режиме но команде мсханиз: 1а управления через блок нодачи топлива 8 и устанавливает рейку з положение, соответствующее заданию. При
поступлении команды на остановку двигателя
по сигналу из бло.ка 8 блок 18 резко переставляет механизм 17 и рейку топливных насосов в положение, соответствующее нулевой нодаче топлива, н двигатель останавливается.
LI Операции по реверсу выполняются теми же блокам путем остановки, а зате: 1 пуска дв гателя в новом направлении при поступлении от датчика 10 сигнала о снижении числа оборотов вала до оборотов реверсирования.
Прн достижении двигателем числа о.боротов, находящегося в запретной зоне, регулятор 19, настроенный ia ее границу, начинает Bbipa6aT j BaTb регулирующее воздействие в
0 виде нневматического унифицированного сигнала. Этот сигнал, во-первых, переключает коммутатор 21, во-вторых, алгебраическ суммируясь с командным сигналом в сумматоре 20, уменьшает велргчину си гнала до тех
5 пор, пока положение механизма 17 и топливпь х насосов не будет соответствовать чнслу оборотов на границе зоны. Прн дальнейшем увеличении командного сигнала до уровня, гарантирующего нри всех загрузках
0 судна и других условиях разго дв 5гателя до числа оборотов за предела.ми запретной зоны, коммутатор 21 в)1овь нерекл очается, и меха 1изм 17 работает напрямую от блока iS.
5 Перед пуском двигателя следует для нроверкн системы переключить тумблер 24 в положение «Коптроль, после чего рукоятку на включен ом командном механизме ереставить в любое положение. Пмитацион0 юе устройство 23 в виде дифференцируюП1,его звена, ностепенно увеличивая давление в выходном трубопроводе датчика оборотов 10, который в этом случае отключен коммутатором 22, обеспечивает выдачу сигналов в
блоки 6 и 8, соответствующие пусковым и минимально-устойчивым оборотам коленчатого вала двигателя. Вследствие этого пусковой клапан вначале открывается, зател закрывается, рейка топливных насосов резко переставляется в пусковое положение, а зател возвращается в заданное положенпс, так что оператор, пе пуская двигатель, имеет возможность провер 1ть прав 1льность и точность отработки блоков и И1сполнительных механизмов
Предмет изобретения
1. Пнев гатическое устройство для дистанционного автоматического улра.ЗЛения судовым двигателем, например дизелем, содержащее командные механизмы, соединенные трубопроводами с сумматором и логическими блоками иереключения комаидных механизмов и подачи топлива, связанными с исполнительными механизмами и получающими импульсы от датчика числа оборотов и сигнализаторов параметров, отличающееся тем, что, с целью исключения работы двигателя в зоне критического числа оборотов и самопроизвольного увеличения скорости судна, на выходе
датч;1ка числа оборотов установлен регуля-тор, соединенный со входом сумматора, получающего регулирующий импульс от блОКа подачи топлива, для поддержания числа оборстов на нижней границе зоны.
2. Устройство по п. 1, отличающееся тем, что, с целью оперативного контроля исправности логических бло.ков устройства перед
включением в де1 1ствие, на выходе датчика числа оборотов установлен механизм имитации разгона двигателя, выполненный ,в виде дифференцирующего звена и включаемый для проверки исправности при неработающем двигателе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО | 1969 |
|
SU254355A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ДИЗЕЛЕМ | 1969 |
|
SU244001A1 |
| Система дистанционного управленияСудОВОй СилОВОй уСТАНОВКОй | 1979 |
|
SU822146A1 |
| Пневматическая система дистанционного управления дизелем | 1989 |
|
SU1721279A1 |
| Система дистанционного автоматизированного управления судовыми двигателями | 1974 |
|
SU495234A1 |
| ЭЛЕКТРОННЫЙ РЕГУЛЯТОР УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ДИЗЕЛЕ | 2006 |
|
RU2299342C1 |
| МНОГОКАНАЛЬНЫЙ НЕПРЕРЫВНОШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1973 |
|
SU374578A1 |
| РЕГУЛЯТОР ОБОРОТОВ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГОСГОРАНИЯ | 1971 |
|
SU305272A1 |
| ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1969 |
|
SU243011A1 |
| Устройство автоматического согласования и контроля режимов многоступенчатых насосных и гидротранспортных установок | 1982 |
|
SU1079568A1 |