Известен продольный протаскивающий транспортер, нрет мущественно для стволообрабатывающих .манпгн, включаюш,нй приводной и ведомый шкивы, снабженные реверсивным замкнутым тяговым органом, на верхней и нижней ветвях которого закренлены перемещаемые в направляющих каретки с челюстными захватами.
Цель изобретення - иовысить ироизводительность и обеспечить перемещение захватов на всю длпну транспортера.
Достигается это тем, что челюсти каждого захвата выполпены с возможностью поворота в продольной вертикальной илоскости. Расстояние между внеишими сторонами челюстей верхнего захвата, находящегося в нерабочем положении, не превышает расстояния между внутренними сторонами челюстей нижнего захвата, находящегося в рабочем положении.
Челюсти каждого захвата свободно пасажены па оси, жестко закренленные на поворотных в горизонтальной плоскости кронштейпах, которые установлены с обенх сторон каретки и niapnnpHO соединены посредством тяг с иоиеречной скобой, жестко соедииенной средней частью с тяговым органом транснортера. Основания челюстей снабжены выступами со скосами, взаимодействующими с упорами, имеющими аналогичные скосы и жестко закрепленными на нанравляющих в
зоне начала рабочего хода захватов. Этим обеснечивается автоматический подъем и опусканне челюстей, а также закрытие и раскрытие захватов.
Чтобы предотвратить пробуксовку тягового органа на приводном шкиве и обеспечить центрирование ветвей тягового органа по оси протаскиван1 я, нижняя ветвь тягового органа снабжена натяжными блоками, а приводной шкив уетановлен на валу с возможностью перемещения относительно его продольиой оси и вынолнен с винтовой направляющей для тягового органа. Патяжной блок установлен у приводного под углом к вертикальHoii плоскости, соответствующим наклону отрезка тягового органа, расположенного между крайней нижней точкой положения тягового оргаиа на приводном шкиве и верхней точкой направляющей натяжного блока.
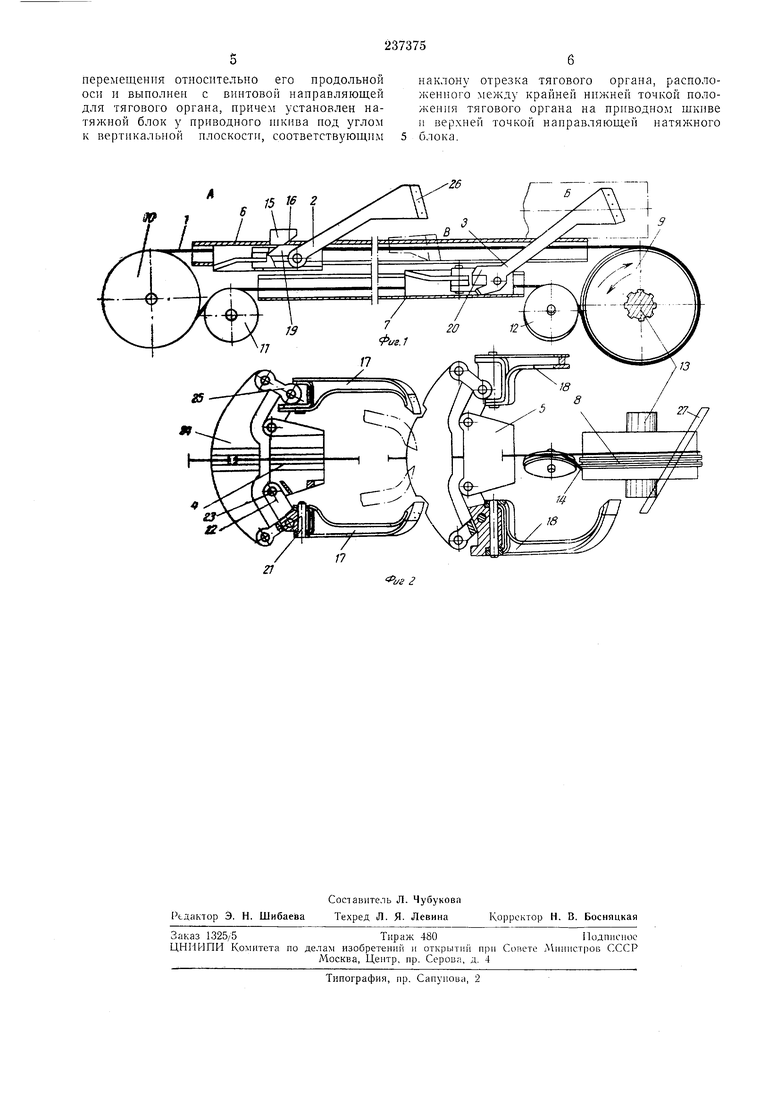
Па фиг. 1 представлен описываемый транспортер, вид сбоку; на фиг. 2 - то же, вид сверху.
Транспортер состоит из замкнутого тросового тягового органа /, расположенного в вертикальной плоскости по оси протаскивания. Па верхней и нижней ветвях тягового органа закреилены захваты 2 и 3. Каретки и 5 захватов установлены в направляющ1 х 6 и 7, разнесенных по высоте. Тяговьи орган заиасован на винтовой направляющей 8 нривод1ЮГО шкива Я ведомом шкиве 1G и натяжных блоках // и 12. Приводной шкив насажен на шлицевой вал 13 с возможностью нопсречного иеремегцения ио иему. Дли уменьЕнения трения между HiKiiBOM 10 и валом 13 соединение их может бьпт) выиолнено с нрнменонием шариков.
Блок 12 расноложен под некоторым углом к вертикальной нлоскостн ио оси нротаскиваиия, совнадающим с наклоном к ней части 14 иижней ветви тягового органа. В .зоне начала рабочего хода у шкива 10 на наирасляющих 6 и 7 жестко закреплены уноры 15 со скосами 16, а основания челюстей 17 и 18 снабжены соответствуюндими выступами 19 и 20. Захват 2 состоит нз двух челюстей 17, свободно иасаженных иа оси 21. Оси жестко закреплены на иоворотных в горизонтальной илоскостн кронштейнах 22, установленных с обеих сторон каретки 4 иа осях 23. Кронштейны 22 шарнирно соединены с понеречноГ скобой 24 упорными пальца, 25. Скоба 24 в средней части соединяется с тяговы.м органом. Челюсти 17 на концах имеют заостренные наконечники 26, которые могут быть выполнены ирямо.шнейнымп нлн зубчатыми. Нижний захват 3 аналогичен верхнему, но имеет другие размеры, расстояние между че.тюстями 18 превышает поперечные габарпты верхнего захвата.
Над прнводным шкивом 9 установлен отбойный ториевой ш,пт 27, скошенный в сторону сброски.
Работает транспортер следующим образом.
При подходе захвата 2 к исходному положению А выступы 19 челюстей 17 отклоняются вниз, поднимая тем самым челюсти в рабочее положение. В это время челюсти 18 захвата 3, находяш,егося в положении Б, опупдены в горизонтальное иоложение, комель обрабатываемого дерева оказывается между челюстями 17 захвата 2.
При включении привода транспортера посредством шлицевого вала 13 приводится во враш:ение шкив 9, а верхняя ветвь тягового органа начинает движеиие, увлекая за собой скобу 24. Скоба 24 через пальцы 25 воздействует на кронштейны 22, которые поворачиваются вокруг осей 23. Челюсти 17 смыкаются и наконечники 26 врезаются в поверхность ствола, надежно захватывая его.
Начинается рабочий ход захвата 2 от А к Б. Одновременно нижний захват 3 движется в противоиоложном направлении.
В процессе врашения приводного шкнва 9 витки тягового органа, запасованного на нем в БИНТОВОЙ направляющей 8, переходят с одних ручьев на другие. Однако вследствие подвижности шкива 9 относительно вала 13 ветви тягового органа остаются лежать в вертикальной плоскости по оси протаскивания, не изгибаясь и не смещаясь в стороны.
ииерции, увлекая за собой челюсти 17, в результате чего они раскрываются скобой 24.
Как только челюсти выйдут из зацепления со стволом, они под собственным весом свободно опускаются в горизонтальное положение В, а комель ствола, встречаясь со скоН1еииым отбойным щитом 27, отклоняется в сторону. Центр тяжести бревна также сме цается в том же направленип, и дерево сакгопроизвольно сбрасывается с транспортера.
В это время иижний захват 3 занимает иоложение А II в описаииом выше порядке также приводится в рабочее состояние. Расстояние между крайними положениями захватов
должно песколько превышать максимальную длину обрабатываемых стволов, что обеспечивает беспрепятственный сброс и укладку под обработку очередного дерева. Для рабочего хода нижнего захвата включается реверс иривода и ириводной шкив начинает вращаться в обратном направлении, смещаясь соответственно по валу.
Предмет изобретения
1. Продольный протаскивающий траиспортер, преимущественно для стволообрабатывающих машин, включающий приводной и ведомый шкивы, снабженные реверсивным замкнутым тяговым органом, на верхней и нижией ветвях которого закреплены перемещаемые в паправляющих каретки с челюстными захватами, отличающийся тем, что, с целью повышения производптельности и перемещения захватов на всю длину транспортера, челюсти каждого захвата выпо.тнены с возможностью поворота в продольной вертикальной плоскости, причем расстояние между внешними сторонами челюстей верхнего захвата, находящегося в нерабочем положении, не
превышает расстояния между внутренними сторонами челюстей нижнего захвата, находящегося в рабочем положении.
2.Транспортер по п. 1, отличающийся тем, что, с целью автоматического подъема и опусканля челюстей, а также закрытия п раскрытия захватов, челюсти каждого из последних свободно насажены на осп, жестко закрепленные на поворотных в горизонтальной плоскости кронштейнах, которые установлены с
обеих сторон каретки и итарнирно соединены посредством тяг с поперечной скобой, жестко соединенной средней частью с тяговым органом транспортера, а основания челюстей снабжены выступами со скосами, взаимодействующими с имеющими аналогичные скосы упорами, жестко закрепленными на направляющих в зоне начала рабочего хода захватов.
3.Транспортер по пп. 1 и 2, отличающийся тем, что, с целью предотвращения пробуксовки тягового органа на приводном шкиве и центрцровання ветвей тягового органа по оси протаскивания, нижняя ветвь тягового органа снабжена натяжными блоками, а нриводперемещения относительно его продольной оси и выполнен с винтовой направляющей для тягового органа, причем установлен натяжной блок у приводного нгкива под углом к вертикальпой плоскости, соответствующим
наклону отрезка тягового органа, расположенного eждy крайней нижней точкой положения тягового органа на приводном шкиве и верхней точкой направляющей натяжного блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПРОТАСКИВАНИЯ И СБРОСКИ СТВОЛОВ ДЕРЕВЬЕВ ПРИ ОБРАБОТКЕ ИХ В СУЧКОРЕЗНОЙ МАШИНЕ | 1966 |
|
SU178966A1 |
| Устройство для подачи стволов деревьев к деревообрабатывающим станкам | 1975 |
|
SU568589A1 |
| Устройство для вытрамбовывания котлованов | 1989 |
|
SU1733563A2 |
| Протаскивающее устройство машины для обрезки сучьев | 1984 |
|
SU1230831A1 |
| СТАНОК ДЛЯ ПРОДОЛЬНОЙ ОКОРКИ ЛЕСОМАТЕРИАЛОВ | 1971 |
|
SU309825A1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ НЕСИНХРОННЫХ АВТОМАТИЧЕСКИХ ЛИНИЙ | 1993 |
|
RU2083349C1 |
| Протаскивающее устройство машины для обрезки сучьев | 1978 |
|
SU743866A1 |
| Протаскивающее устройство сучкорезной машины протяжного действия | 1981 |
|
SU1011367A1 |
| ПОЛОЧНЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР | 2009 |
|
RU2406672C1 |
| Протаскивающее устройство сучкорезной машины | 1979 |
|
SU887162A1 |
да 1
