имеет натяжное -приспособление, установленное на направляющих соответствующей каретки, нрн этом каждая блочная поддержка может быть выполнена в виде двух пар сдвоенных блокоВ;, установленных на звеньях исполнительного механизма и основании при помощи осей, размещенных в щеках, щарнирно закрепленных на кронштейнах. Каждое звено исполнительного механизма должно иметь не менее двух блочных поддержек, одна из которых устанавливается на самом звене, а другая - на оси щарнирного соединения его с другим звеном. Кроме того, приспособление каждой нодвижной каретки, фиксирующее гибкий тяговый орган, может быть выполнено в виде стонорных кулачков и взаимодействующих с ними храповых колес, расположенных по обе стороны подвижной каретки на кронштейне, соединяющем каретку со штоком гидронилиндра ее привода, а натяжное приспособление каждой замкнутой трособлочной €истемы целесообразно выполнить в виде обводного блока, установленного на оси, опирающейся концами на винтовце пары, размещенные в подпружиненных разъемных корпусах, подвижно установленных на салазках и снабженных ограничительными ребрами.
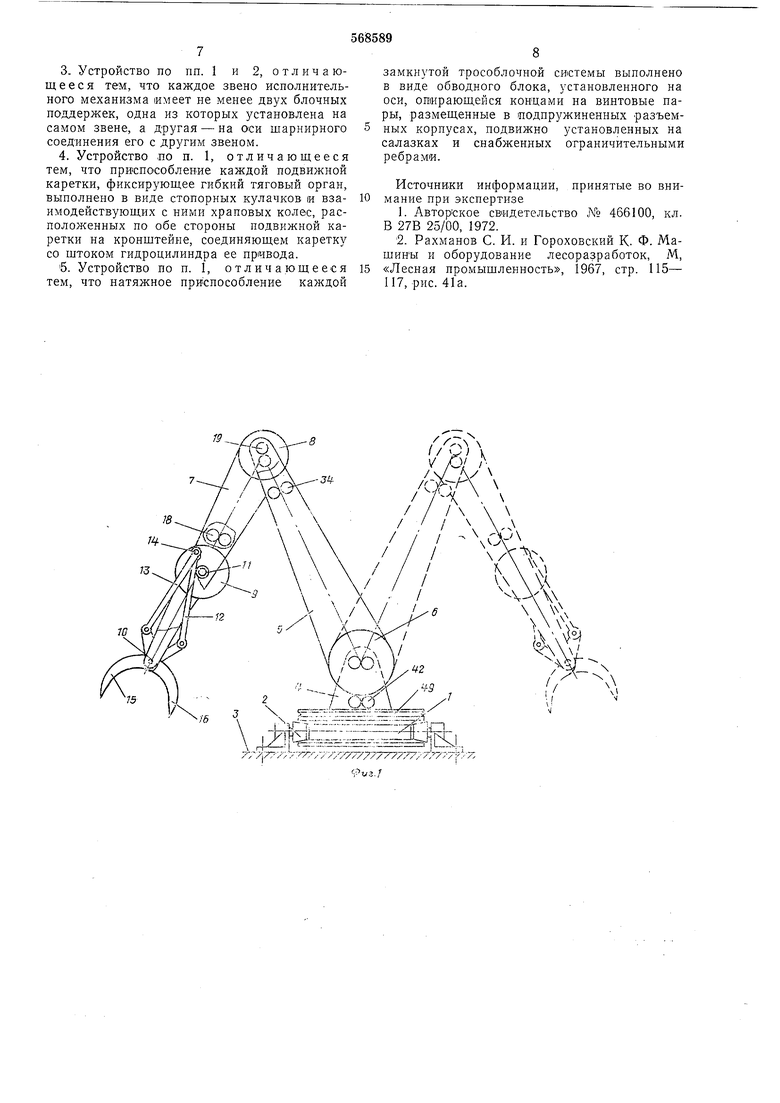
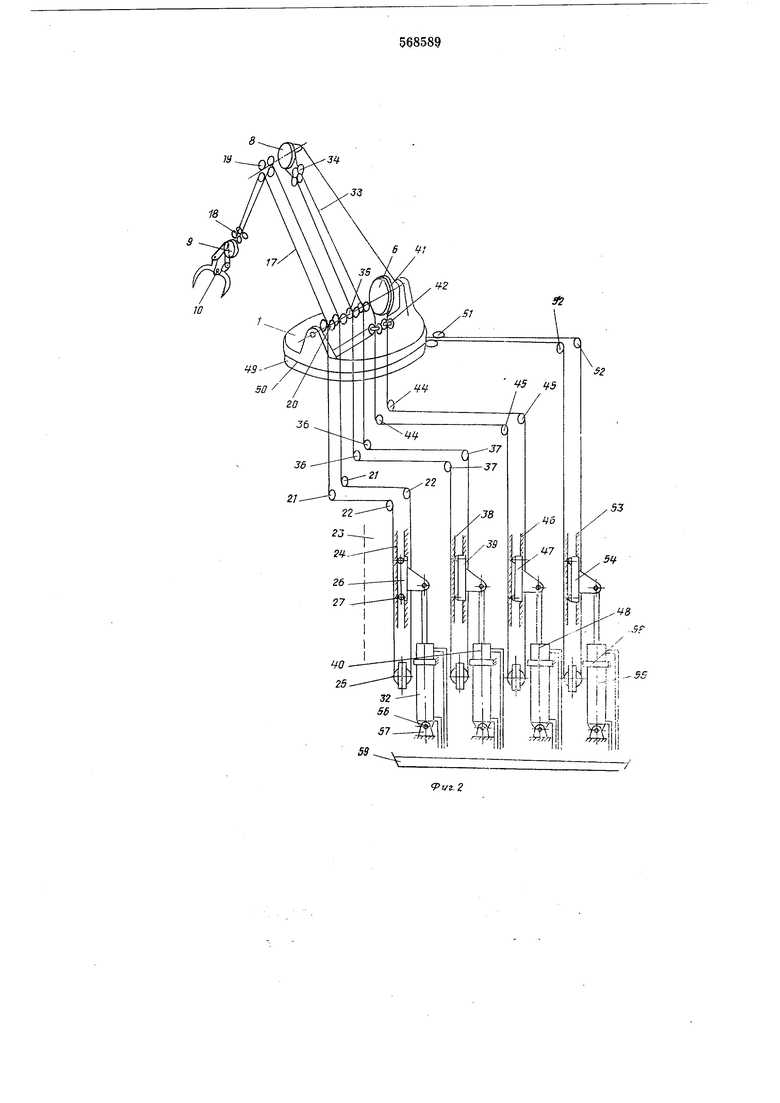
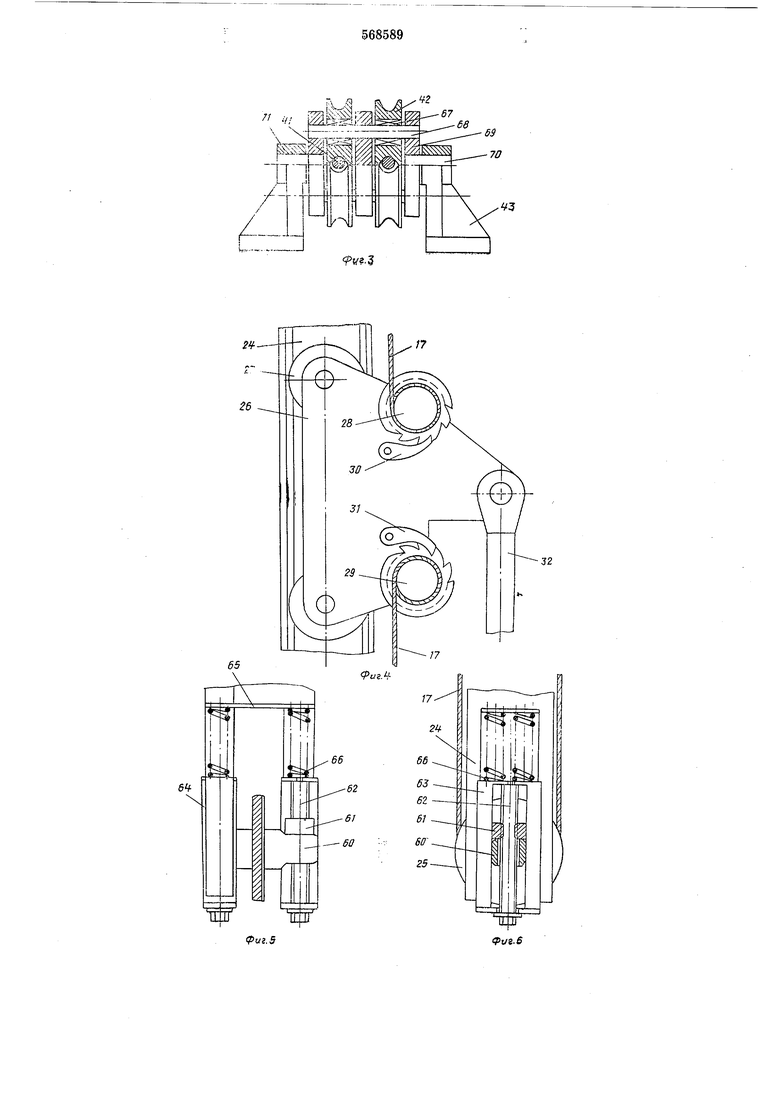
На фиг. 1 схематически изображено устройство для подачи СТВОЛОВ деревьев к деревообрабатывающим станкам, общий вид (пунктирной линией показано положение устройства при обслуживании второго станка); на фиг. 2 - схема трособлочных систем с приводами; на фиг. 3 - блочная поддержка; на фиг. 4 - подвижная каретка, вид сбоку; на фиг. 5 - натяжное приспособление; на фи.г. 6 - то же, вид сбоку.
Устройство для подачи стволов деревьев к деревообрабатывающим станкам содержит поворотное в горизонтальной плоскости основание 1, установленное на опорных катках 2, закрепленных на станине 3. На основании 1 в кронштейнах 4 установлена стрела 5 с жестко связанным с ней барабаном 6, снабл енная рукоятью 7, также с жестко связанным с ней барабаном 8. Барабан 9 челюстного захватного органа 10 установлен свободно на подшипниках 11 и связан с ним через тяги 12 и 13, одним концом закрепленные на шарнире 14 барабана 9, а другим - шарнирно сочлененные с кривошипами челюстей 15 и 16.
На барабане 9 уложен и закренлен гибкий тяговый орган 17, обе ветви которого через спаренные блочные поддержки 18, установленные на рукояти 7, спаренные блочные поддержки 19, размещенные в щарнире крепления рукояти 7 к стреле 5, снаренные блочные поддержки 20, установленные в шарнире крепления стрелы 5 на кронштейнах 4, блоки 21, блоки 22, установленные в номешении 23 расположения гидродилиндров над направляющими 24, а также через обводной блок 25 связаны с кареткой 26, подвижно установленной на катках 27. Проходя через блоки 21, тяговый орган меняет направление. Каждая ветвь гибкого тягового органа 17 имеет натяжное приспособление 28 и 29 с фиксаторами 30 и 31. Каретка 26 специальным кронштейном связана со штоком гидроцилиндра 32.
На барабане 8 привода рукояти 7 уложен и закреплен гибкий тяговый орган ЗЗ, который через спаренные блочные ноддержки 34, установленные на стреле 5, спаренные блочные поддержки 35, установленные на шарнире соединения стрелы 5 с кронштейнами 4, блоки 36, а также через блоки 37, расположенные над направляющими 38, связан с кареткой 39, установленной в направляющих 38 с возможностью перемещения от гидроцилиндра 40.
На барабане 6 привода стрелы 5 уложен и
закреплеи гибкий тяговый орган 41, ветви которого через спаренные блочные поддержК1И 42, установленные при помощи опор 43 на основании 1, блоки 44, а также через блоки 45, установленные над направляющими 46,
связаны с кареткой 47, установленной в направляющих 46 с возможностью перемещения от гидроцилиндра 48.
По наружному периметру специально установленного на новоротном основании 1
кольца 49 уложен и закреплен гибкий тяговый орган 50, ветви которого через блочные поддержки 51 и блоки 52, установленные над направляющими 53, закреплены на каретке 54, перемещаюпейся в направляющих 53 при
помощи гидроцилиндра 55. Гидроцилиндры 32, 40, 48 и 55 закренлены шарнирно на пальцах 56, ненодвижно установленных в кронштейнах 57, и жестко закреплены хомутами 58. Под гидроцилиндрами расположена открытая сверху емкость 59 для сбора рабочей жидкости.
Обводной блок 25 установлен на оси 60, опирающейся на гайки 61, которые имеют возможность поступательного перемещения
при вращении винтов 62, проходящих через отверстие в оси 60. Гайки и оси установлены с возможностью скольжения в корнусах 63, которые в свою очередь установлены с возможностью перемещения в специальном проеме направляющих 24, 38, 46 и 53 подвижных кареток 26, 39, 47 и 54. Корпуса 63 имеют ограничительные ребра 64, фиксирующие их в (проемах направляющих. В прое.ме между корпусом 63 свободного блока 25 и упорной
стенкой 65 в направляющих размещены демпферные пружины 66.
Блочные поддержки состоят из двух пар сдвоенных блоков 42 для прохода обеих ветвей гибкого тягового органа привода каждого из звеньев исполнительного механизма. Блоки при помощи подщипников 67 установлены на осях 68, которые размещены в щеках 69. В щеки запрессованы пальцы 70, которыми собранная блочная поддержка шарнирно
закреплена в буксах 71, например, кронштейнов 43.
Работа устройства для подачи стволов деревьев к деревообрабатывающим станкам осуществляется следующим образом.
Перед захватом ствола разжимают челюсти 15 и 16 захватного органа. Для этого включают гидроцилиндр 32, его шток, втягиваясь, перемещает подвижную каретку 26 по направляющим 24, установленным параллельно движению щтока гидроцилиндра. Гибкий тяговый орган 17 сообщает барабану 9 вращательное движение. Тяги 12 и 13, закрепленные на шарнире 14 барабана 9, смещаются, поворачивая челюсти 15 и 16. Захват 10 опускают на ствол. Затем реверсируют ход щтока гидроцилиндра 32 и зажимают ств-ол. При этом барабан 9 поворачивается при номощи гибкого тягового органа 17 в обратную сторону и смещает тяги.
Включением гидроцилиндра 40 перемещают каретку Э9 но направляющим 38, которая Увлекает за собой гибкий тяговый орган 33. Последний приводит во вращение барабан 8. Рукоять 7 поднимается и отделяет зажатое захватом 10 дерево от пачки. После этого включают гидроцилиндр 48, который перемещает каретку 47. Последняя гибким тяговым органом 41 поворачивает барабан 6, и стрела 5 поднимается до определенного положения. Затем реверсируют ход щтоков пидроцилиндров 40 и 48, и манипулированием стрелы 5 и рукояти 7 размещают захват 10 с деревом в зоне обработки. Производят разжим захвата.
Последовательным включением гидроцилиндров 40 и 48 возвращают звенья исполнительного механизма в исходное положение, ориентируя захват 10 на пачку стволов деревьев, и цикл подачи ствола повторяется. При разбросе стволов и для обеспечения правильной укладки их в зону обработки включают гидроцил«нд,р 55, который перемещает каретку 54, увлекающую гибкий тяговый орган 50. Последний поворачивает основание 1 в горизонтальной плоскости.
Каждая из подвижных кареток 26, 39, 47 и 54 оборудована специальными приспособлениями 28 и 29 для предварительного натяжения ветвей гибкого тягового органа, а также для подбора оптимальной зоны работы каждого из механизмов устройства. Например, для того, чтобы увел тчить угол поворота устройства в горизонтальной плоскости вправо, на подвижной каретке 54 ветвь гибкого тягового органа 50 приспособлением 29 ослабляют, предварительно освободив храповое колесо от фиксатора 31, а затем его вновь стопорят. Фиксатором 30 освобождают храповое колесо приспособления 28, которое вращают, выбирая слабину в замкнутом контуре тягового органа 50, а затем стопорят. При одном и том же ходе щтока гидроцилиндра 55 сектор поворота основания 1 переместится вправо. Аналогичную регулировку зон работы
производят и для других механизмов устройства.
После регулировки зоны работы механизма вращением винтов 62, установленных в корпусах 63, оси 60 смещают, создавая блоками 25 монтажное натяжение гибкого тягового органа. От ударных и резких динамических нагрузок или изменения температуры корпуса 63 натял ных приспособлений предохраняются пружинами 66, положение которых определяется упорными стенками 65.
В связи с передачей усилий от гидроцилиндров через гибкие тяговые органы возможно обслуживание о.цним устройством
двух зон обработки поворотом основания 1 Устройства на 180° или увеличением поворота барабана 8 рукояти 7 в щарнире стрелы 5 с переходом захвата 10 на рукояти 7 через «себя в вертикальной плоскости.
Формула изобретения
1. Устройство для подачи стволов деревьев к деревообрабатывающим станкам, включающее поворотное в горизонтальной плоскости
основание с установленным на нем исполнительным механизмом, состоящим из поворотных в вертикальной плоскости и щарнирно соединенных друг с другом стрелы и рукояти с челюстным захватом органом, а также гидронилиндры привода челюстей захватного органа, рукояти, стрелы и основания, отличаю- щ е е с я тем, что, с целью повышения эффективности работы и расширения технологических возможностей, гидроциляшдры привода кинематически связаны с соответствующими звеньями исполнительного механизма при помощиГибких тяговых органов, заиасованных в барабаны, блочные поддержки и обводные блоки и закрепленных с образованием замкнутых трособлочных систем на подвижно установленных в направляющих каретках, соединенных со олтоками соответствующих гидроцилиндров, при этом барабан трособлочной системы привода челюстей захватного органа
свободно установлен при помощи оси на рукояти исполнительного механизма, барабан привода рукояти жестко закреплен на ней в шаонире соединения ее со стрелой и барабан привода стрелы жестко закреплен на ней в
П1арнире соединения ее с основанием, имеющим ручей для запасовки гибкого тягового оргаиа привода его поворота в горизонтальной плоскости, а каждая подвижная каретка снабжена приспособлением, фиксирующим
гибкий тяговый орган, и каждая замкнутая трособлочная система имеет натяжное приспособление, установленное на направляюHUIX соответствующей каретки. 2. Устройство по п. 1, отличающееся
тем, что каждая блочная поддержка выполнена в виде двух пар сдвоенных блоков, установленных на звеньях исполнительного механизма и основании при помощи осей, размещенных в щеках, щарнирно закрепленных
на кронщтейнах. 3.Устройство по пп. 1 и 2, отличающееся тем, что каждое звено исполнительного механизма имеет не менее двух блочных поддержек, одна из которых установлена на самом звене, а другая - на оси шарнирного соединения его с другим звеном. 4.Устройство по п. 1, отличающееся тем, что приспособление каждой подвижной каретки, фиксирующее гибкий тяговый орган, выполнено в виде стопорных кулачков и взаимодействующих с ними храповых колес, расположенных по обе стороны подвижной каретки на кронщтейне, соединяющем каретку со штоком гидроцилиндра ее привода. б. Устройство по п. I, отличающееся тем, что натяжное при способление каждой замкнутой трособлочной системы выполнено в виде обводного блока, установленного на оси, опирающейся концами на винтовые пары, размещенные в подпружиненных разъемных корпусах, подвижно установленных на салазках и снабженных ограничительными ребрами. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство .№ 466100, кл. В 27В 25/00, 1972. 2. Рахманов С. И. и Гороховский К. Ф. Машины и оборудование лесоразработок, М, «Лесная промышленность, 1967, стр. 115- 117, рис. 41а.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи стволов деревьев к деревообрабатывающим станкам | 1984 |
|
SU1402557A1 |
| Транспортное средство для бесчокерной трелевки деревьев | 1981 |
|
SU981041A1 |
| ПРОТАСКИВАЮЩЕЕ УСТРОЙСТВО МАШИНЫ ДЛЯ ОБРЕЗКИ СУЧЬЕВ | 1972 |
|
SU426820A1 |
| ПРОДОЛЬНЫЙ ПРОТАСКИВАЮЩИЙ ТРАНСПОРТЕР | 1969 |
|
SU237375A1 |
| Механизм управления гидравлическим экскаватором | 1982 |
|
SU1027352A1 |
| Машина для очистки лож водохранилищ от древесины | 2019 |
|
RU2743241C2 |
| Транспортное средство для формирования и перевозки пачки длинномерных грузов | 1981 |
|
SU988608A1 |
| Протаскивающее устройство машины для обрезки сучьев | 1978 |
|
SU743866A1 |
| Устройство для подвода энергии к подвижному потребителю | 1986 |
|
SU1492407A1 |
| Манипулятор | 1975 |
|
SU547195A1 |
V lUiiA - .1X, л ,
г ------ -
77 i77-x 7: 77;-7v/ ;7777777/V7x;- ,
w
x-t- : -
,. , i/vH Г ,1-№Ш
il
