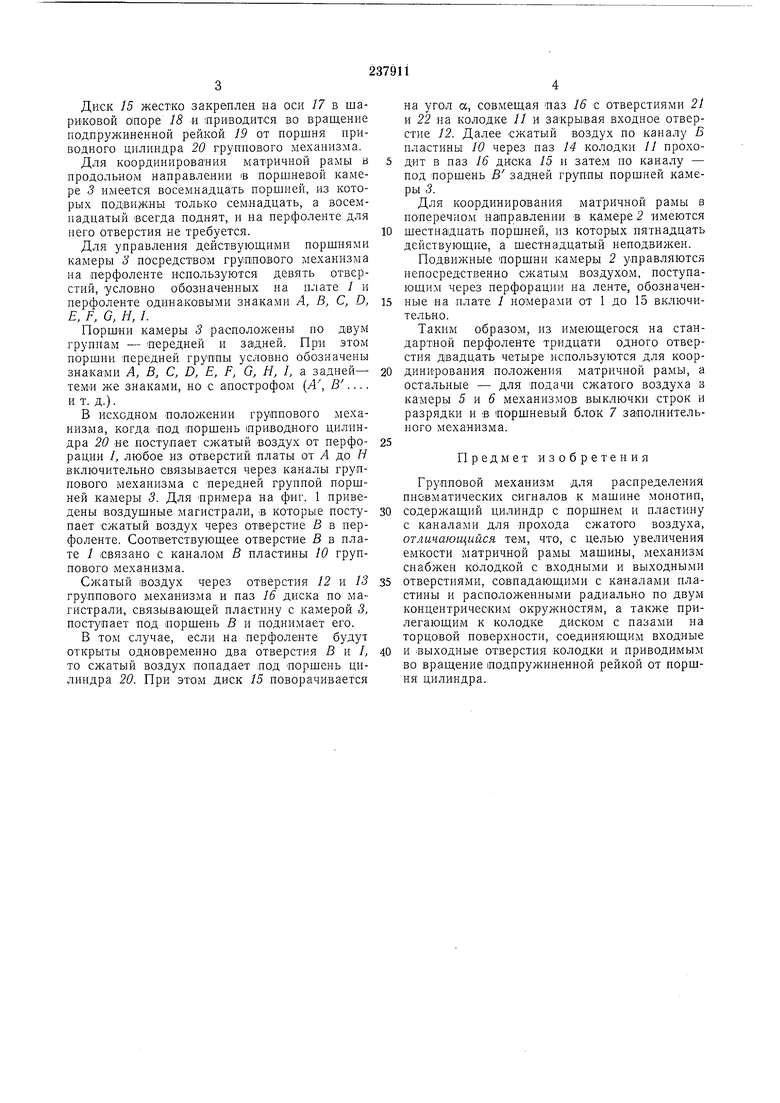
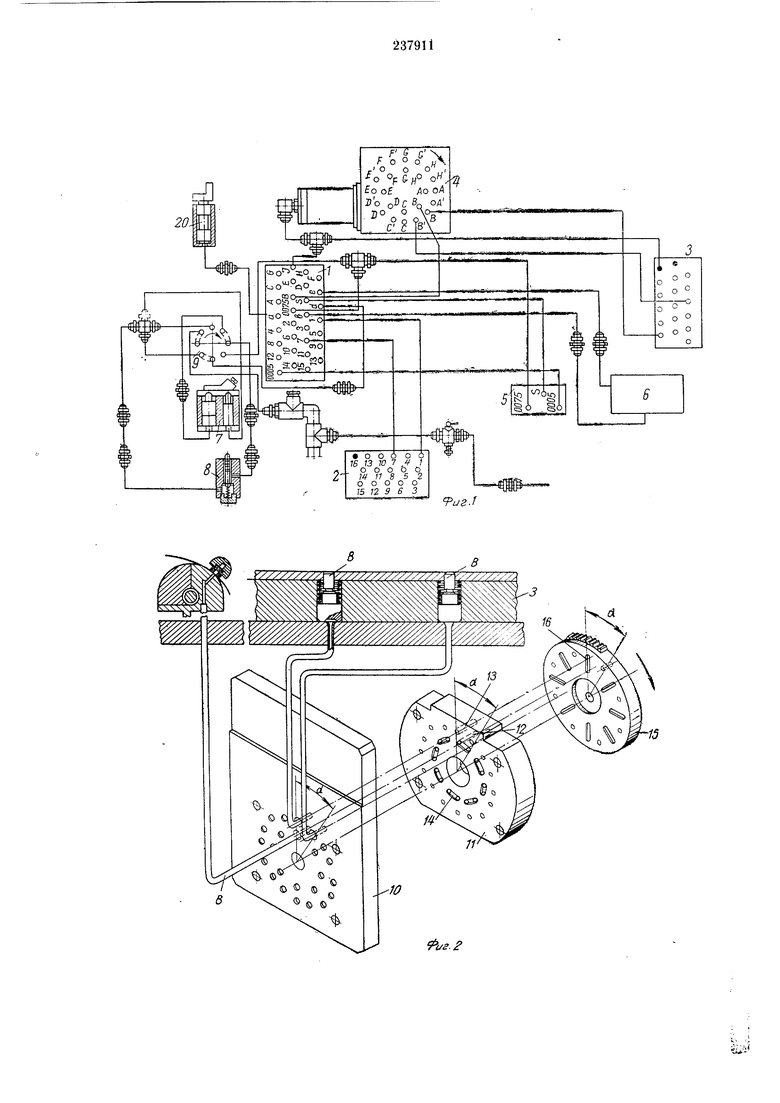
Известен групповой механизм для распре-деления нневматических сигналов к машине монотип, включающий цилиндр с поршнем и пластину с каналами для прохода сжатого воздуха. Предлагаемый групповой механизм дает возможность увеличить емкость матричной рамы машины, для чего он снабжен колодкой с входными и выходными отверстиями и прилегаюшим к колодке диском с пазал и на торцовой поверхности. При этом входные и выходные отверстия колодки совпадают с каналами пластины и расположены по двум концентрическим окружностям. Диск соединяет входные и выходные отверстия колодки и приводится во вращение подпружиненной рейкой от порщня цилиндра. На фиг. 1 изображена пневматическая схема управления машины, содержащей групповой механизм; на фиг. 2 - общий вид группового механизма; на фиг. 3 - его привод в продольном и по А-Л разрезах. Подключенная к пневмосети плата 1 с входными отверстиями, частично перекрываемыми перфолентой, соединена воздушными магистралями с камерами 2 и 3, имеющими порщни для установки матричной рамы монотипа (на чертежах не показана) в поперечном я продольном направлениях, групповым механизмом -4, механизмом выключки строк с поршневой камерой 5, механизмом разрядки с поршневой камерой 6, заиолнительным механизмом с поршневым блоком 7 и клапаном 8 для фиксирования перфоленты и переключателем 9 для отливки шрифта в гранку. Используемая перфолента и.меет стандартную ширину, допускающую размещение, например, тридцати одного отверстия. Чтобы кодировать координаты расширенной матричной рамы при стандартней ширине перфоленты, в групповой механизм, распределяющий сигналы по отдельным группам поршней одной или нескольких камер, включили неподвижную пластину 10 с каналами, расположенными по двум концентрическим окружностям, одни из которых для входа сжатого воздуха от платы 1, а другие - для передачи его в одну из камер 2 или 3. За пластиной установлена колодка 11с входными J2 п выходными 13 отверстиям:И, совпадающими с каналами пластины 10 п расположенными также по двум концентрическим окружностям. Между каждой парой отверстий имеются пазы 14. К колодке 11 прилегает диск 15 с радиально расположенными на торцовой поверхности пазами 16, которые в исходном положении диска соединяют в.ходные отверстия 12 с выходнымн отверстиями 13 колодки.
Диск 15 жестко закреплен на оси 17 в шариковой опоре 18 и привадится во вращение подпружиненной рейкой 19 от поршня приводного цилиндра 20 группового механизма.
Для координирования матричной рамы в продольном нанравлении В норшневой камере 3 имеется восемнадцать поршней, из которых подвижны только семнадцать, а восемнадцатый всегда поднят, и на перфоленте для него отверстия не требуется.
Для управления действующими поршнями камеры 3 посредством группового механизма на перфоленте используются девять отверстий, условно обозначенных на нлате / и перфоленте одинаковыми знаками А, В, С, D, Е, F, G, Н, I.
Поршни камеры 3 расположены по двум группам - передней и задней. При этом поршни передней группы условно обозначены знаками А, В, С, D, Е, F, G, Н, I, а задней- темп же знаками, но с апострофом (А , В .... и т. д.).
В исходном положении группового механизма, когда под поршень приводного цилиндра 20 не поступает сжатый воздух от перфорации /, любое из отверстий платы от А до U включительно связывается через каналы группового механизма с передней группой поршней камеры 3. Для примера на фиг. 1 приведены воздушные магистрали, в которые поступает воздух через отверстие В в перфоленте. Соответствующее отверстие В в плате 1 связано с каналом В пластины 10 группового механизма.
Слсатый воздух через отверстия 12 и 13 группового механизма и паз 16 диска по магистрали, связывающей пластину с камерой 3, поступает под поршень В и поднимает его.
В том случае, если на перфоленте будут открыты одновременно два отверстия В и /, то сжатый воздух попадает под поршень цилиндра 20. При этом диск 15 поворачивается
на угол а, совмещая паз 16 с отверстиями 21 и 22 на колодке // и закрывая входное отверстие 12. Далее сжатый воздух по каналу В пластины 10 через паз 14 колодки 11 проходит в паз 16 диска 15 и затем ио каналу - под поршень В задней группы поршней камеры 3.
Для координирования матричной рамы в поперечном направлении в камере 2 имеются
шестнадцать поршней, из которых пятнадцать действующие, а шестнадцатый неподвижен.
Подвижные поршни камеры 2 управляются непосредственно сжатым воздухом, поступающим через перфорации на ленте, обозначенные на илате 1 номерами от 1 до 15 включительно.
Таким образом, из имеющегося на стандартной перфоленте тридцати одного отверстия двадцать четыре используются для координирования положения матричной рамы, а остальные - для подачи сжатого воздуха в камеры 5 Н 6 механизмов выключки строк и разрядки и в поршневый блок 7 заполнительного механизма.
Предмет изобретения
Групповой механизм для распределения пневматических сигналов к машине монотип,
содержащий цилиндр с поршнем и пластину с каналами для прохода сжатого воздуха, отличающийся тем, что, с целью увеличения емкости матричной рамы машины, механизм снабжен колодкой с входными и выходными
отверстиями, совпадающими с каналами пластины и раснолол :енными радиально по двум концентрическим окружностям, а также прилегающим к колодке диском с пазами на торцовой поверхности, соединяющим входные
и выходные отверстия колодки и приводимым во вращение подпружиненной рейкой от поршня цилиндра.

.
