Предлагаемое устройство может быть использовано в качестве выходного регистрирующего устройства в вычислительных машинах, при контроле технологических параметров и т. д.
Известны автоматические координатографы, содержащие переключатель датчиков, лодключе«ный к двухкоординатному регистратору с электромеханической следящей системой в каждом канале. Однако в этих устройствах записываемые функции регистрируются в виде отдельных точек, что вызывает необходимость дополнительной обработки графиков.
Предложенный координатограф отличается от известных тем, что в каждом канале последовательно основной следящей системе через переключатель датчиков подключена дополнительная электромеханическая следящая система, выход которой связан со входом усилителЯ основной следящей системы, а выход усилителя через переключатель подключен к двигателям основной и дополнительной следящих систем. Это позволяет не тлоько наносить отдельные точки функции, но и соединять их прямыми линиями либо по какомунибудь иному закону.
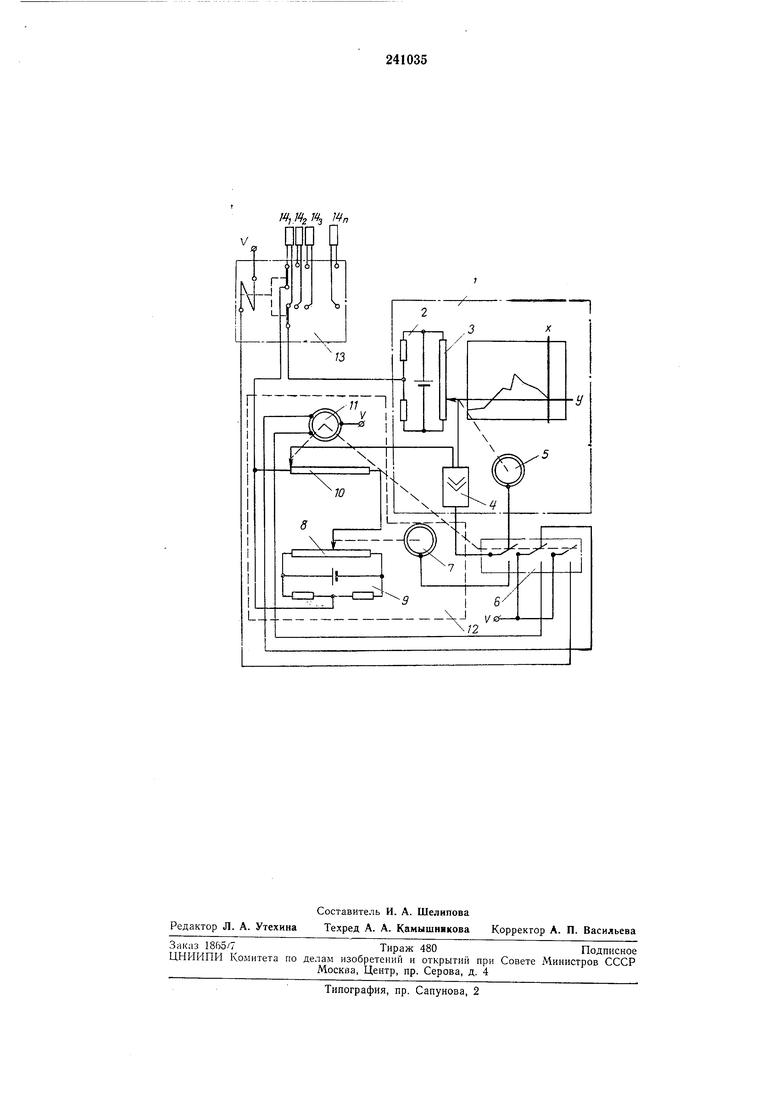
Блок-схемка предлагаемого координатографа представлена на че ртеже.
Двухкоординатный регистратор 1 содержит следящую систему, состоящую из измерительного мостика 2 с реохордо1М 3, электронного усилителя 4 и реверсивного двигателя 5.
Двигатель 5, вал которого связан с ползунком реохорда 3, включен на выход усилителя 4 через коммутирующее устройство 6, которое подключает к усилителю либо двигатель 5, либо балансный двигатель 7. Вал двигателя 7
механически связан с ползунком реохорда 8, входящего в мост 9, который с реохордОМ 10, синхронным двигателем 11, перемещающим ползунок реохорда 10 из одного крайнего положения в другое, и балансным двигателем 7
составляет дополнительную следящую систему 12.
Через переключатель 13 поочередно включаются датчики 14 координат. Датчик переключается переключателем 13 по командам от коммутирующего устройства 6. Контакты коммутирующего устройства 6 переключаются в тот момент, когда двигатель 11 приводит ползунок реохорда 10 в крайние положения.
Это переключение приводит к смене направления вращения двигателя //, подключению к выкоду усилителя 4 двигателя 5 или 7 и к подаче или снятию напряжения на привод переключателя 13. на реле или на бесконтактных элеменВ исходном положении схемы (см. чертеж) пер€ключ1атель 13 датчиков находятся в первой позиции, и на. вход прибора подключен датчик 14-i, .переключающее устройство находится в положении, при котором дви.гатель // перемещает ползунок реохорда 10 в позицию, при которой реохорд 10, включенный последовательно с из1Мбрительным мостиком 2 основной следящей системы, исключен из схемы и к выходу усилителя подключен балансный двипатель 5. В это на Вход следящей системы регистратора оказывается включенным только датчик 14, и ползунок реохорда 3, г. с ним рбгистрирую:щий орган по каналу У занимает положение, соответствующее величине напряжения, снимаемого с датчика 14. В тот Момент, двигатель 11 доводит ползунок реохорда 10 до крайнего положен.ия (на схеме левого), переключается коммутирующее устройство, в результате чего на выходе усилителя подключен двигатель 7, а двигатель 5 отключается, и ползунок реохорда 3 зафиксирован в положении, соответствующем напрял ению, снимаемому с датчика Й1, переключатель 13 переходит на вторую позицию и подключает к прибору датчик MZ, двигатель // меняет направление вращения и начинает перемещать ползунок реохорда 10 в другое крайнее положение (на схеме правое). В этом положении схемы напряжение, снимаемое с датчика MZ, оказывается включенным «навстречу напряжению, снимаемому с мостика- 2, которое равно напряжению, спимаемому с датчика 14. Разность этих напряжений автоматически компенсируется на реохорде JO напряжением, подаваемым с мостика 9 посредством перемещения ползунка реохорда 8, снизанного с в-алом двигателя 7. Когда ползунок реохорда 10 подходит к крайнему (правому) положению, при котором последовательно включен датчик MZ, мост 2 с напряжением в диагонали, равным напряжению датчика MI, и реохорд 10, к которому приложено напряжение, равное разности напряжений датчиков }4i и Mz, коммутирующее устройство снов-а переключается. В результате на выходе прибора остается подключенным датчик MZ, к выходу усилителя подключается двигатель 5, а двигатель 7 фиксирует ползунок реохорда 8 в положении, при котором на реохорд 10 подается напряжение, равное разности Н1апряжений датчиков 14 и MZ, а синхронный дви1гатель 11 вновь меняет направление своего вращения. В первый момент после переключения двигатель 5 не вращается, так как схема находится в состоянии равновесия, но как только олзунок реохорда 10 отходит от своего .крайего положения (.правого), на выход усилитея поступает свгнал небаланса, и двигатель 5, тремЯСь восстановить равновесие, начинает еремещать ползунок реохорда 3, а с ним и регистрирующий орган. Перемещение происходит до тех пор, пока ползунок реохорда /( не выведет реохорд 10 из измерительной схемы, а напряжение, поданное на него, т. е. разность напряжений датчиков 14 и 14z, ие ока.жется скомпенсир.ованной на- реохорде 3. Скорость перемещения ползунка реохорда 5 при постоянной скорости- вращения двигателя // пропорциональна вел-ичине напряжения, приложенного к реохорду 10, т. е. разности напрял ений, снимаемых с датчиков 14i и 14z, и будет изменяться во времени линейно или по какому-либо другому закону в зависимости от закона, заложенното в реохорд 10. При достижении ползунко.м реохорда 10 крайнего (левого) положения вновь переключается коммутирующее устройство, и на выход прибора подключается датчик 14з, двигатель 5 отключается от усилителя и фиксирует ползунок реохорда 3 в положении, соответствующем- напряжению, снимаемому с датчика 14 , и- т. д. до тех пор, пока не будут опрошены ,все датчики. Одновременно и аналогично каналу У pta6oтает канал X, но на него поступают сигналы, пропорциональные -координатам по оси X. В результате одновременной работы каналов X и У на плоскость наносятся точки, соответствующие напря.жениям датчиков координат, и каждые две последующие точки будут соединены между собой отрез-ком линии требуемой формы. Пр-едлагаемый координатограф может быть вы-полнен как на сопротивлениях, так и на компенсаторах др-угих типов, например ферродина ги-ческих, дифтрансформаторньгх и т. д. Предмет изобретения Автоматический координ.атотраф, содержащий переключатель датчиков, .подключенный к двухкоо-рдиватному регистратору с электромеханической следящей системой в каждо.м канале, состоящей из измерительной схемы, связанной с электронным усилителем, и реверсивного двигателя, отличающийся тем, что, с целью расширения ,возмол ностей записи, в каждом канале последов1ательно основной следящей системе через переключатель датчиков подключена дополнительная электромеханическая следящая система, вы.ход которой связан с входом усилителя основной следящей си-стемы, а выход усилителя через переключатель подключен к двигателям основной и дополнительной следящих систе.м.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАРУЖНЫЙ ЭЛЕКТРИЧЕСКИЙ ТЕРМОМЕТР | 1969 |
|
SU247555A1 |
| ВСЕСОЮЗНАЯ IПАТЕйТНО-Т?}(НИ«ЕС^{Д,я1toilbJlHC.)^ f-KA | 1972 |
|
SU359564A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯТОЛЩИНЫ полосы | 1965 |
|
SU172703A1 |
| Прибор для измерения твердости по методу роквелла | 1977 |
|
SU741102A1 |
| РЕГИСТРАТОР ХРОМАТОГРАФА | 1969 |
|
SU246916A1 |
| Многоканальное регистрирующее устройство | 1980 |
|
SU924511A1 |
| ЕСЕСОЮЗНАЯi^^>&THTHO-T?^!';^^i?OH.—1 1}'-"~.Л:'ЮТглКЛ Авторы*:..-.и В. Ш. Жоржолиании средств автоматизации | 1973 |
|
SU369531A1 |
| Задающее устройство препаративного хроматографа | 1973 |
|
SU506802A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ СУММАРНОГО ЗНАЧЕНИЯ ПАРАМЕТРА | 2015 |
|
RU2602673C1 |
| Устройство для моделирования синхронной машины | 1975 |
|
SU527717A2 |