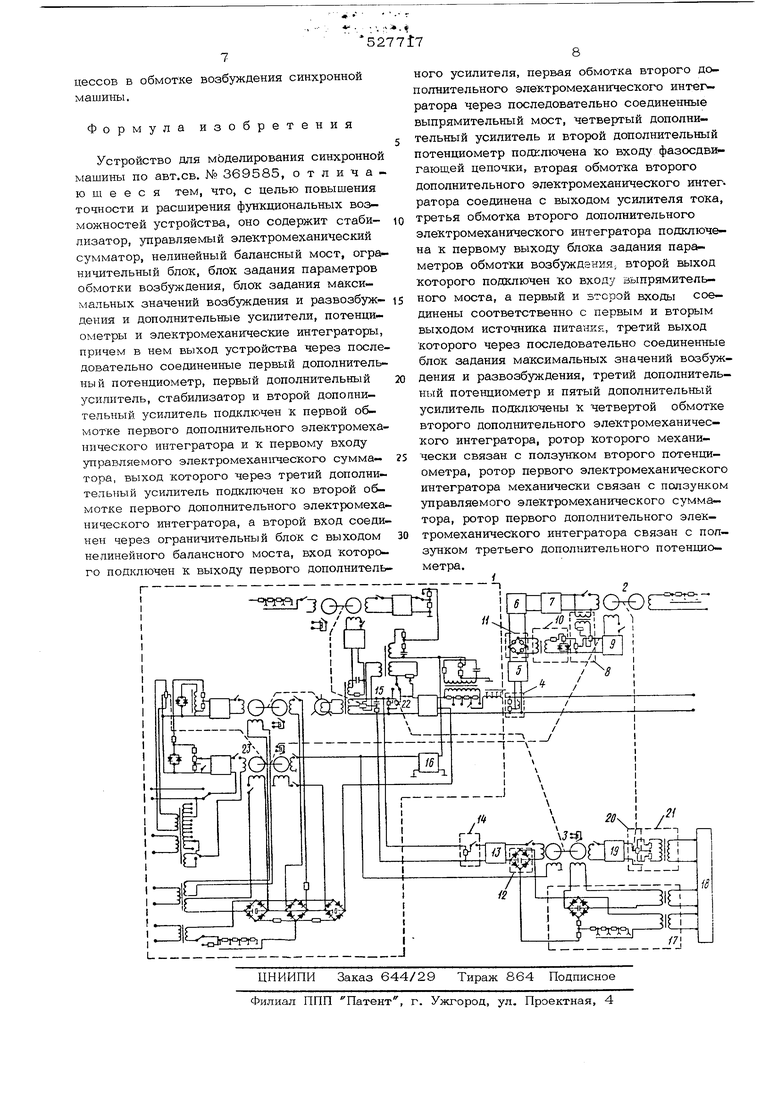
попнительный потенциометр, первый дополнительный усилитель, стабилизатор и второй дополнительный усилитель подключен к первой обмотке первого дополнительного электромеханического интегратора и к первому входу управляемого электромеханического сумматора, выход которого через третий дополнительный усилитель подключен ко второй обмотке первого дополнительного электромеханического интегратора, а второй вход соединен через ограничительный блок с выходом нелинейного балансного моста, вход которого подключен к выходу первого дополнителЕэного усилителя, первая обмотка второго дополнительного электромеханического интегратора через последовательно соединенные выпрямительный мост, четвертый дополнительный усилитель и второй дополнительный потенциометр подключена ко входу фазосдвигаюшей цепочки, вторая обмотка второго дополнительного электромеханического интегратора соединена с выходом усилителя тока, третья обмотка второго дополнительного электромеханического интегратора подключена к первому выходу блока задания параметров обмотки возбуждения, второй выход которого подключен ко входу выпрямительного моста, а первый и второй входы соединены соответственно с первым и вто- ръ;м выходом источника питания, третий вы- 30 ход которого через последовательно соединенные блок задания максимальных значений возбуждения и развозбуждения, третий дополнительный потенциометр и пятый дополнительный усилитель подключены к четвертой обмотке второго дополнительного электромеханического интегратора, ротор которого механически связан с ползунком второго потенциометра, ротор первого элек тромеханического интегратора механически связан с ползунком управляемого электромеханического сумматора, ротор первого дополнительного электромеханического интегратора связан с ползунком третьего дополнительного потенциометра. На чертеже дана принципиальная схема устройства для моделирования синхронной машины. К совокупности блоков 1 устройства по авт. св. №369585 предлагаемое устройство содержит первый и второй дополнительные электромеханические интеграторы 2 и 3 (например, двигатель-генераторыj Выхо устройства через последовательно соединен ные первый дополнительный потенциометр 4 первый дополнительный усилитель 5, стабилизатор 6 и второй дополнительный усилитель 7 подключен к первой обмотке первог дополнительного электромеханического инте
ратора 2 и к первому входу управляемого электромеханического сумматора 8. Один из выходов последнего через третий дополнительный усилитель 9 подключен ко второй обмотке интегратора 2, а второй его вход через ограничительный блок 10 соединен с выходом нелинейного балансного моста 11, вход которого подключен к выходу усилителя 5.
Первая обмотка второго дополнительного электромеханического интегратора 3 через выпрямительный мост 12, четвертый дополнительный усилитель 13 и второй Дополнительный потенциометр 14 подключена к выходу фазосдвигаюшей цепочки 15. Вторая обмотка интегратора 3 соединена с выходом усилителя тока 16, а третья его обмотка подключена к первому выходу блока 17 задания параметров обмотки возбуж- дения, второй выход которого подключен ко входу выпрямительного моста 12. Входы блока 17 соединены с выходами источника питания 18.
Четвертая обмотка интегратора 3 связана с источником питания 18 через последовательно соединенные пятый дополнительный усилитель 19, третий дополнительный потенциометр 20 и блок 21 задания максимальных значений возб ткдения и развозбуждения Ротор интегратора 3 механически связан с ползунком второго потенциометра 22. Ротор первого электромеханического интегратора 23 механически связан с ползунком сумматора 8, а ротор первого дополнительного электромеханического интегратора 2 связан с иол.зукком потенциометра 20. Интегратор 2 совместно с эпемектами 4 11 служит для воспроизведения действия регулятора возб лдения. Интегратор 3 совместно с элементами 12-14, 17-21 слркит для воспроизведения эле7 ;тро 1агнитных процессов в обмотке возбуждения синхронной машины. На вход усилителя тока 16 подается напряжение, пропорциональное току в выходной цепи устройства, моделирующего синхронную машину. Фаза токов в первой и второй обмотке интегратора 3 с помошью настройки фазы выходного напряжения усилителя 13 устанавливается так, чтобы при 1 0, где 1 - ток статора по продольной оси ротора d , вращающий момент от действия токов этих обмоток равен нулю. При наличии тока I вращающий момент определяется уравнением M U,,U,,5mU,,i;,,, где и, , - напряжение на выходе уси13 соответственно. лителей Если на потенциометре 22 установить сопротивление, пропорциональное Х - Х, ,I,(Xj-x;), rfleIj KaU,sinU,U,3, t Кд- коэффициенты пропорциональности. В установившемся состоянии врашаюший момент М уравновешивается противоположн направленным врашаюшим моментом, создаваемым другой парой обмоток интегратора 3, При увеличении тока I,, вызванного, на ример, коротким замыканием, появляется избыточный момент ()() 1, - значения тока при корот ДеI ком замыкании и предшествующем установившемуся режиму соответственно. Поскольку величина (Ь -I)(Xj-XjxapaKTe ризует изменение синхронной э.д.с. Б маши ны, то л М КдЕ . Под действием избыточного момента ротор интегратора 3 приходит во вращение, увлекая за собой механически связанный с ним ползунок потенциометра 22, что вызывает уменьшение переходной э.д.с. Б„ синх хронной машины и тока J. до тех пор, по ка не восстановится баланс вращающих моментов, воздействующих на ротор интеграто ра 3, Изменение величины Е за любой промежуток времени д{/, в течение которого вели чины Е и В можно считать неизменяю щимися. можно представить уравнением -/Р -Е 1- т ЧТ SoSo где Т, - постоянная времени обмотки возбуждения синхронной машины; Eg- э.д.с. холостого хода синхронной машины, соответствующая в каждый данны момент напряжению возбудителя; ....1,а,Х -стлпкротхкая э.д.с. машины Ч О Оо / причем .o,, Постоянную времени 1 можно воспроизво дить, устанавливая с помощью блока 17 за Дания параметров обмотки возбуждения соо ветствующую величину постоянного тока в обмотках интегратора 3. Так как при корот ком замыкании напряжение на выходе устройства, моделирующего генератор, уменьш ется, то на выходе нелинейного балансного моста 11 и на выходе усилителя 9 напряж ние появляется. Напряжение же на выходе усилителя 7, благодаря действию стабилиза тора 6, не меняется. Поэтому ротор интегратора 2 начинает вращаться, увлекая за собой ползунок потенциометра 20, который увеличивает напряжение на входе усилителя 19, что соответствует увеличению тока возбуждения моделируемой синхронной машины. В результате вращающий момент от действия тока в обмотке, включенной на усилитель 19, начинает увеличиваться, и скорость вращения ротора интегратора 3, первоначально вызванная увеличением тока при моделировании короткого замыкания, начинает замедляться до тех пор, пока не установится баланс вращающих моментов. При моделировании короткого замыкания в статоре ротор интегратора 23 в блоке 21 вращается, увлекая за собой механически связанный с ним ползунок управляемого электромеханического сумматора 8, при этом вращающий момент и скорость ротора интегратора 2 увеличивается. Изменение напряжения и„ , снимаемого с электромеханического сумматора 8 определяется уравнением .. «4 где Кз,К - постоянные коэффициенты. Таким образом, в систему возбуждения введен сигнал по первой производной тла. Сигнал по второй его производной можно также ввести на вход з силителя 9, продифференцировав сигнал по первой прскзволтои. Процесс при небольших отклонениях -лг.. ряжения на выходе устройства анапогичег: вышеописанному и отличается лишь тем, что в этом случае скорость ротора интегратора 2 и рост напря ; ення, снимаемого с потенциометра 20, воспроизводящего дегютБия тока возбуждения: синхронной Mamniibi. будут пропорциональны отклонению напряжения на выходе устройства. Уровень напряжения на выходе генератора устанавливается с помощью потенциометра 4, а наклон характеристики регулирования с помощью ограничительного блока 10. Коэффициенты усиления по отклонению напряжения и первой производной угла устанавливаются с помощью электромеханического сумматора 8, С помощью блока 21 устанаштиваются величины максимальных значений возбуждения и развозбуждения генератора, а с помощью блока 17 - постоянная времени обмотки возбуждения. Такое выполнение устройства позволяет овысить точность устройства в целом и расширить его ф тжлиональные возможности за счет более полного учета действия регуятора возбуждения и электромагнитных про
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ СИНХРОННОЙ МАШИНЫ | 1973 |
|
SU369585A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ УПРАВЛЯЕМОГОРЕАКТОРА | 1969 |
|
SU252735A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ СИНХРОННОГОГЕНЕРАТОРА | 1969 |
|
SU238901A1 |
| Вентильный электродвигатель | 1984 |
|
SU1257770A1 |
| Способ управления бесщеточной синхронной машиной | 1988 |
|
SU1624657A2 |
| Синхронный электродвигатель | 1986 |
|
SU1387153A1 |
| Устройство для моделирования синхронной машины | 1982 |
|
SU1125633A1 |
| МАШИННО-ВЕНТИЛЬНЫЙ КАСКАД | 1971 |
|
SU312343A1 |
| Способ управления бесщеточной синхронной машиной | 1985 |
|
SU1305821A1 |
| Устройство для защиты ротора синхронной машины от перегрева | 1980 |
|
SU886131A1 |
