Известны механизмы для образования и разметки криволинейных поверхностей, содержащие рычажную систему, связанную с основанием и состоящую из опорной стойки, ведущего рычага, группы направляющих звеньев, двух поворотных рычагов, плоских и пространственных кинематических пар.
Предлагаемый механизм отличается от известных тем, что его основание выполнено в виде двух взаимно перпендикулярных направляющих, а опорная стойка связана с перемещающимся по ней ведущим рычагом. Последний передает движение с помощью группы направляющих звеньев двум поворотным рычагам, перекрестие которых описывает требуемую поверхность второго порядка.
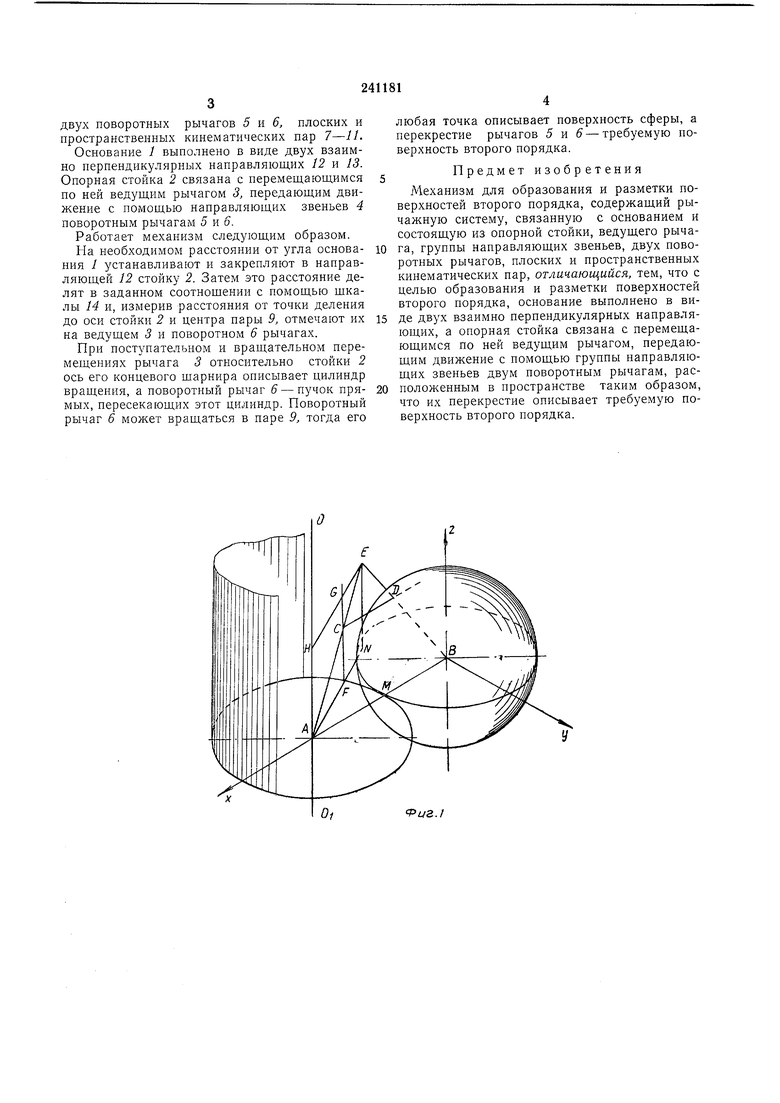
На фиг. 1 изображено геометрическое построение точки, принадлежащей поверхностп второго порядка; на фиг. 2 - описываемый механизм.
Механизм используется для построения поверхности второго порядка как геометрического места точек пространства, для которых отношение расстояния от данной точки к расстоянию до данной прямой имеет постоянное значение е. При различных е вид и размер поверхности меняются.
стным гиперболоидом вращения, при е 1 - параболпческим цилиндром.
Для построения произвольной точки поверхностп (см. фиг. 1) расстояние АВ от точки В до прямой OOi делят точкой А4 в соотношенпи
Радиусом MB описывают сферу с
- в
AM
пентром в точке В, а затем строят цилиндр вращения с осью 00 и радиусом AM.
Через точку А проводят произвольную прямую АС, а из точки пересечения ее с цилиндром- прямую СД, параллельную АВ.
Если Д - точка встречи прямой СД со сферой, то продолжения радиуса ВД и прямой
АС пересекаются в точке Е, принадлежащей
поверхности второго порядка. Через точку С
проводят образующую цплиндра, а из точки Е
опускают перпендпкуляр ЕН на прямую OOi.
Ёслп точка Е паходится на поверхности второго порядка, должно выполняться соотноще/70D i.r
нпе . Это равенство вытекает
ЕН AM
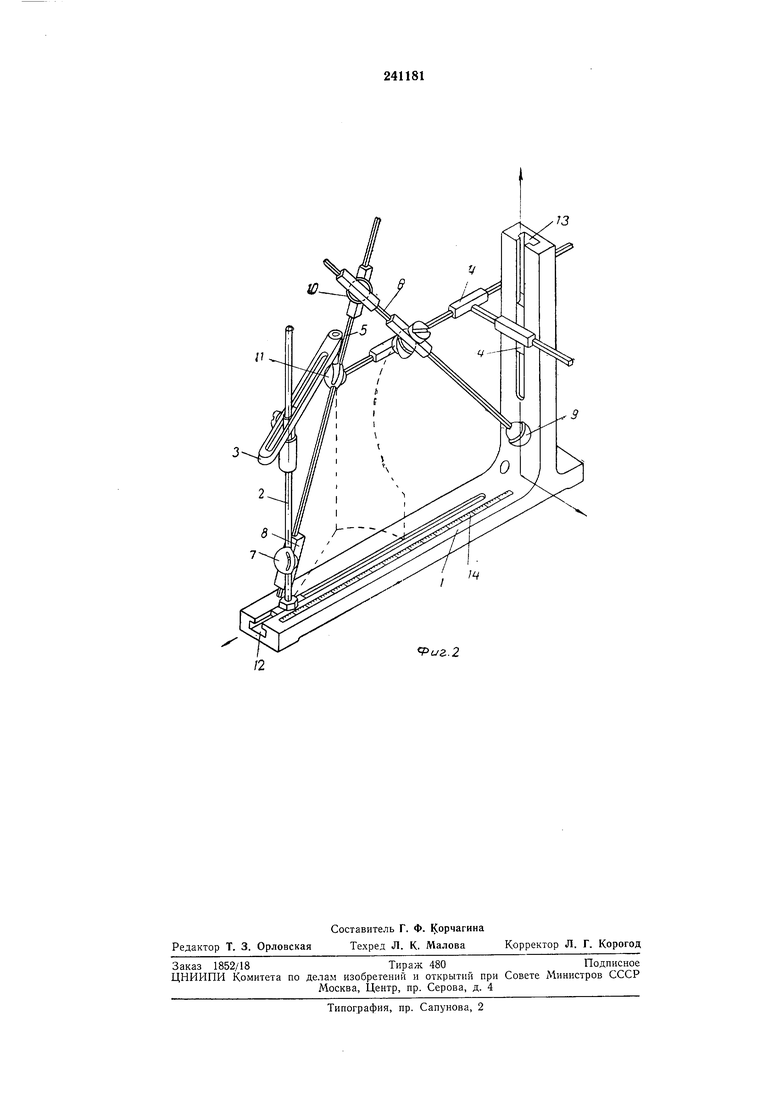
из рассмотрения двух пар подобных треугольников АЕВ, CED. и АЕН. CEG. Описанное построение выполняется предложенным механизмом (фиг. 2).
двух поворотных рычагов 5 к 6, плоских и пространственных кинематических пар 7-11.
Основание 1 выполнено в виде двух взаимно нерпендикулярных направляющих 12 п 13. Опорная стойка 2 связана с перемещающимся по ней ведущим рычагом 3, передающим движение с помощью направляющих звеньев 4 поворотным рычагам 5 и о.
Работает механизм следующим образом.
На необходимом расстоянии от угла основания 1 устанавливают и закрепляют в наиравляющей 12 стойку 2. Затем это расстояние делят в заданном соотнощении с помощью щкалы 14 и, измерив расстояния от точки деления до оси стойки 2 и центра пары 9, отмечают их на ведущем 5 и поворотном 6 рычагах.
При поступательном и вращательном перемещениях рычага 3 относительно стойки 2 ось его концевого щарнира описывает цилиндр вращения, а поворотный рычаг 6 - пучок прямых, пересекающих этот цилиндр. Поворотный рычаг 6 может вращаться в паре 9, тогда его
любая точка описывает поверхность сферы, а перекрестие рычагов 5 и 6 - требуемую поверхность второго порядка.
Предмет изобретения
Механизм для образования и разметки поверхностей второго порядка, содержащий рычажную систему, связанную с основанием и состоящую из опорной стойки, ведущего рычага, группы направляющих звеньев, двух поворотных рычагов, плоских и пространственных кинематических пар, отличающийся, тем, что с целью образования и разметки поверхностей второго порядка, основание выполнено в виде двух взаимно перпендикулярных направляющих, а опорная стойка связана с перемещающимся по ней ведущим рычагом, передающим движение с помощью группы направляющих звеньев двум поворотным рычагам, расположенным в пространстве таким образом, что их перекрестие описывает требуемую поверхность второго порядка.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ РАЗМЕТКИ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА ОБЩЕГО ВИДА | 1969 |
|
SU240271A1 |
| Полуавтомат для разметки мест расположения деталей кроя на швейных изделиях | 1987 |
|
SU1567161A1 |
| МНОГОКРАТНЫЙ ШАРНИРНЫЙ ПАРАЛЛЕЛОГРАММ | 2006 |
|
RU2331805C1 |
| ОБРАЗОВАНИЯ И РАЗМЕТКИ ПОВЕРХНОСТИ | 1969 |
|
SU242625A1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2008 |
|
RU2404385C2 |
| РЫЧАЖНЫЙ ПЯТИЗВЕННЫЙ МЕХАНИЗМ | 2020 |
|
RU2751011C1 |
| Прибор для вычерчивания кривых | 1990 |
|
SU1729814A1 |
| ПРИБОР ДЛЯ ЗАДАНИЯ ЛАЗЕРНОЙ ОПОРНОЙ ПЛОСКОСТИ | 2000 |
|
RU2178546C1 |
| Способ подготовки под сварку патрубков с забойной трубой | 1980 |
|
SU893476A1 |
иг.1
//
з
14
.2
