Предлагаемый механизм служит для разметки поверхностей второго лорядка общего .вида (эллипсоида, эллилтичеокото параболоида, двухполостного гиперболоида, гилерболитического цилиндра и других поверхностей) и механизирует процесс.
Кроме Т01ГО, с (ПОМОЩЬЮ механизма можно наносить на неречисленных поверхностях необходимые линии, осуществляя их разметку. Механизм может быть использован для привода рабочего инструмента в обрабатывающих станках, в приспособлениях для пространственной разметки и в других случаях, где необходимо обработать или разметить пространственные кулачки, щаблоны, эксцентрики и другие детали.
Механизм содержит основание с двумя стой|ками, одна из которых переста1вная, и смонти,рован«ый на основании и стойках пространственный шарнирный многозвенник, состоящий из ведущего рьгчага, направляющих звеньев и двух ловоротных рычагов, в месте пересечения которых установлен исполнительный элемент.
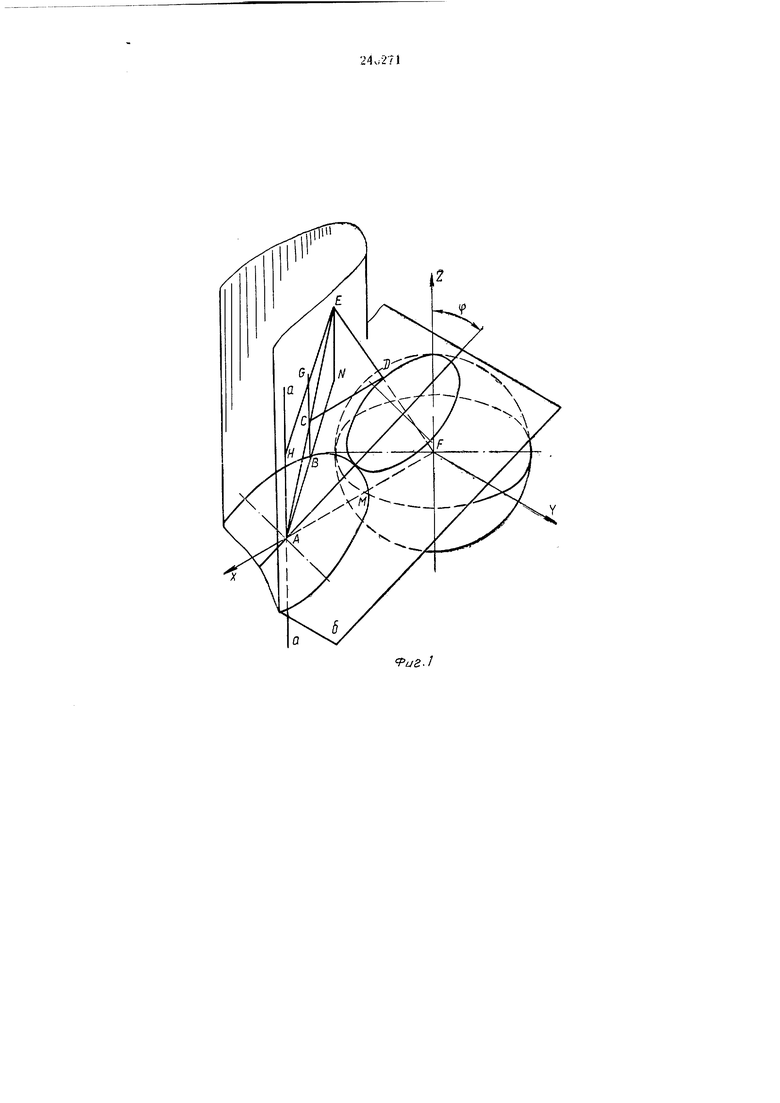
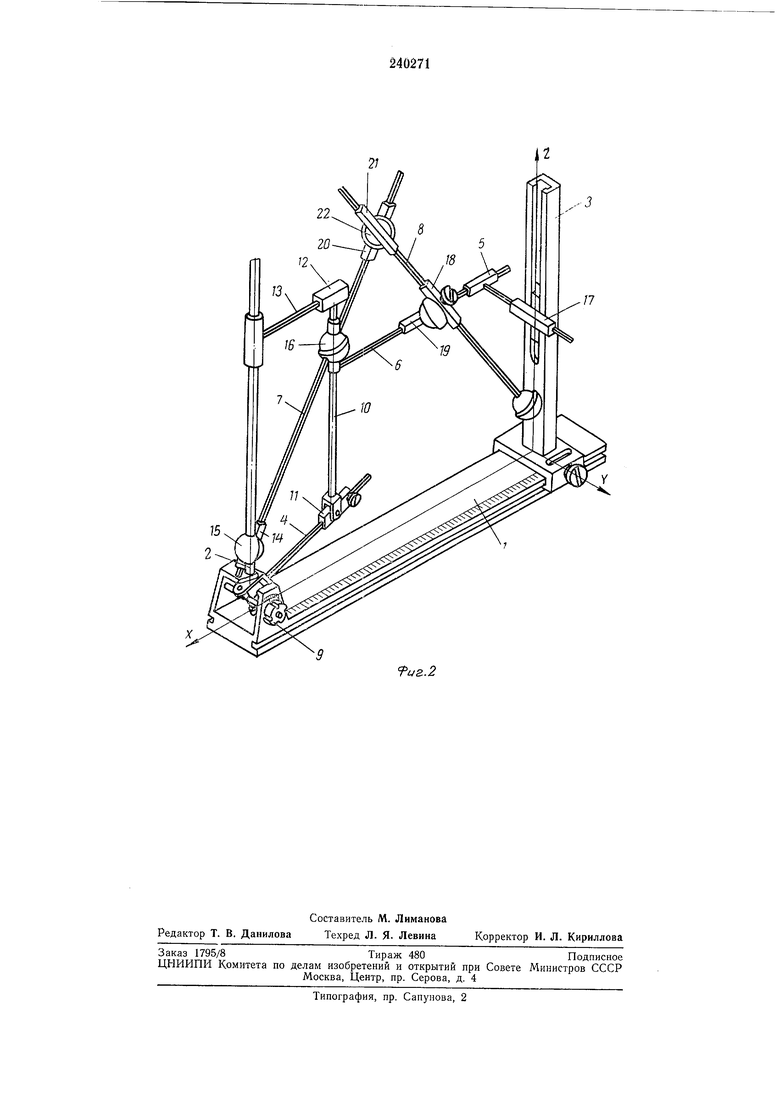
На фиг. 1 изображено геометрическое построение точки, принадлежащей поверхности второго порядка; на фиг. 2 - механизм, общий вид.
рического места точек пространства, для которых отношение расстояния от данной точки к направленному расстоянию до данной прямой имеет постоянное значение.
Под направленным расстоянием от точки до прямой понимают величину отрезка, проведенного из точки до пересечения с прямой параллельно Некоторой плоскости, которая составляет угол ф с прямой и перпендикулярна к плоскости, определяемой заданными точкой F и прямой аа.
.Поверхность второго порядка при равном значении отношения е будет различна: при - трехосным эллипсоидом, при е зшф - эллиптическим параболоидом, при -двухполостным гиперболоидом, при - гиперболическим цилиндром, при -однополостным гиперболоидом.
Построение точки поверхности второго порядка (см. фиг. 1) производят следующим образом.
Расстояние AF от точки F до прямой аа де„ ,,FM
лят точкой М в отношении е .
AM
Под утлом ф к прямой аа проводят плоскость б так, что она в то же время будет перпендикулярна плоскости XFZ.
11ЫМИ аа. Радиусом MF вычерчивают сферу с центром в тОЧке F.
Через А строят произвольмую прямую АС, а из точки пересечения ее с цилиндром - прямую CD, па,раллель,ную AF.
Если D - точка встречи прямой CD со сферой, то продолжедие радиуса FD и прямая АС пересекаются в точке Е, прииадлежащей поверхности второго лорядка.
Через точку С проводят о,бразую|щую цилиндра, а из точки Е - прямую ЕН, параллельную .плоскости б.
Если точка Е находится на -поверхности второго порядка, должно выполняться услоEF FM
вие е.
ЕН AM
Это paBfiHCTiBo вытекает из рассмотрения двух пар подобных треугольников AEF, CED и АЕН, CEG.
Описанно е построение ороизводят при помощи предлагаемого механизма. Он содержит основание / с двумя стойками 2 н 3, при этом стойка 3 переставная вдолъ основания. На стойках и основании смонтирован пространственный шарнирный многозвенник, состоящий из ведущего рычага 4, .направляющих звеньев 5, 6 н двух поворотных рычагов 7 и 5.
Рычаг 4 шарнирно присоединен IK основанию 1 и может устанавлнваться нод углол ф к оси стойки 2 и фиксироваться в этом положении ВИнто-м 9.
К ведущему рычагу 4 шарнирно присоединена вертикальная тяга 10.
Шарнирное соединение .рычага 4 и тяги 10 может переставляться с помощью ползуна 1L Тяга JO при помощн ползуна 12 соединена с рычагом 13, втулка которого свободно перемещается по стойке 2.
Поворотный рычаг 7 кинематически связан с пальцем .14 шарнира 15, установленного на стойке 2. В средней части рычага 7 установлен шарнир 16, соединенный с тягой 10, внутренняя часть которого соединена с цилиндрической втулкой, расположенной на тяге 10. С этой втулкой жестко соединены направляющие звенья 5 и 5 и крестообразный ползун 17,
входящий в направляющий паз стойки 3. С ползуном соединено направляющее звено 5. Поворотный рьмаг 8 ша-рнирно связан со стойкой 3. В необходимом месте -рычага 8 зажимным устройством 18 установлена сферическая кинематическая пара, соединенная при помощн 19 со звеном 6.
Па поворотных рычагах 7 и 8 имеются ползуны 20 и 21, соединенные в пересечении между рычагами ша.рниром 22, в котором установлен исполнительный элемент механизма, который образует поверхность второго порядка. Работает механизм следующим образом. На необходимом расстоянии от стойки 2
устанавливают стойку 3. Расстояние между стойками делят в заданном отношении по шкале, нанесенной на основании /. Отсчеты расстояний от точки деления до осей стоек 2 и 3 снимают и устанавливают их на ведущем
и поворотном рычагах 4 vi 8 путем перестановки ползунов .11 и 12. В исходном положении механизма рычаг 4 устанавливают под требуемым углом к оси стойки 2. При вращении рычага 4 вертикальная тяга 10 описывает
цилиндр, а рычаг 7 -пучок цря.мых, пересекающнх этот цилиядр.
Далее рычаг 4 перемещается параллельно оси ОХ, а сферическая кинематическая пара в средней части рычага 5-по поверхности c4ieры. Исполнительный элемент в пересечении рычагов 7 и S образует поверхность второго порядка.
Предмет изобретения
Механизм для разметки поверхностей второго порядка общего вида, отличающийся тем, что, с целью механизации процесса, он содержит основание с двумя стойками, одна из которых переставная, и смонтированный на основании и стойках пространственный шарнирный многозвенник, состоящий из ведущего рычага, направляющих звеньев и двух поворотных рычагов, в месте пересечения уста.новлен иополнительный элемент.
15, Ди

| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ ОБРАЗОВАНИЯ И РАЗМЕТКИ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА | 1969 |
|
SU241181A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1973 |
|
SU405502A1 |
| ОБРАЗОВАНИЯ И РАЗМЕТКИ ПОВЕРХНОСТИ | 1969 |
|
SU242625A1 |
| Захватное устройство для цилиндрических длинномерных изделий | 1986 |
|
SU1440842A1 |
| Прибор для вычерчивания эллипсов | 1976 |
|
SU640867A1 |
| МЕХАНИЗМ ЗИГЗАГ ДЛЯ ШВЕЙНЫХ МАШИН | 1967 |
|
SU204114A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| УСТРОЙСТВО ДЛЯ СТРУЙНОЙ ОБРАБОТКИ ПОВЕРХНОСТИ НАГРЕВА КОТЕЛЬНОГО АГРЕГАТА | 2005 |
|
RU2289079C1 |
| Чертежный прибор | 1981 |
|
SU977214A1 |