Известны автогрейдеры, содержащие раму с pai6oi4HiM органоМ, .механизм, Имити,рующ1ий на1КЛ01Н рабочего органа, жидкостный уровень и гидравлический привод рабочего Органа.
Предлагаемый автог.рейдер отличается тем, что жидкостный уровень в качестве датчика в электрическую депь управления с нргеводом И механически связан с имитируюЩИЛ1 наклон |рабочего органа .механизм:С1М.
Жидкостный уровень выполнен в виде электролитического вращающегося потенциометра, механически связанного с нодвижным контактом, изменяющим величину сопротивления реостата, который установлен несоосно с валом имитирующего наклон рабочего органа механизма.
Конструкция грейдера позволяет повысить точность поддержания углового положения рабочего органа.
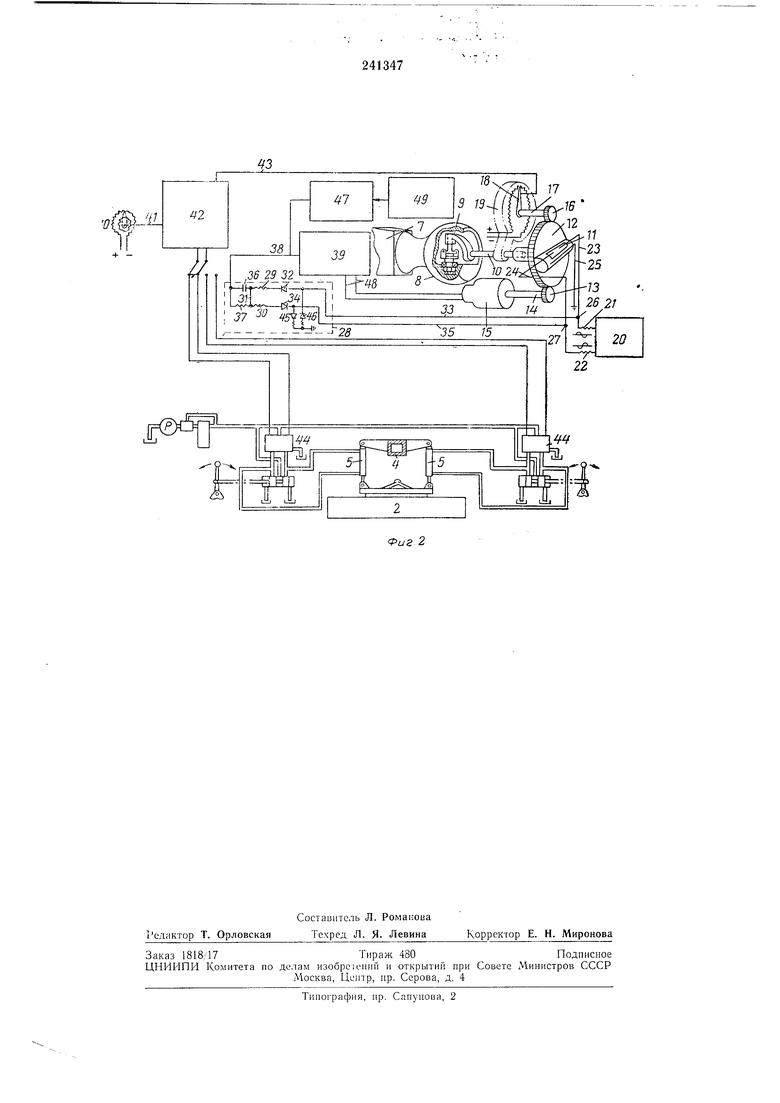
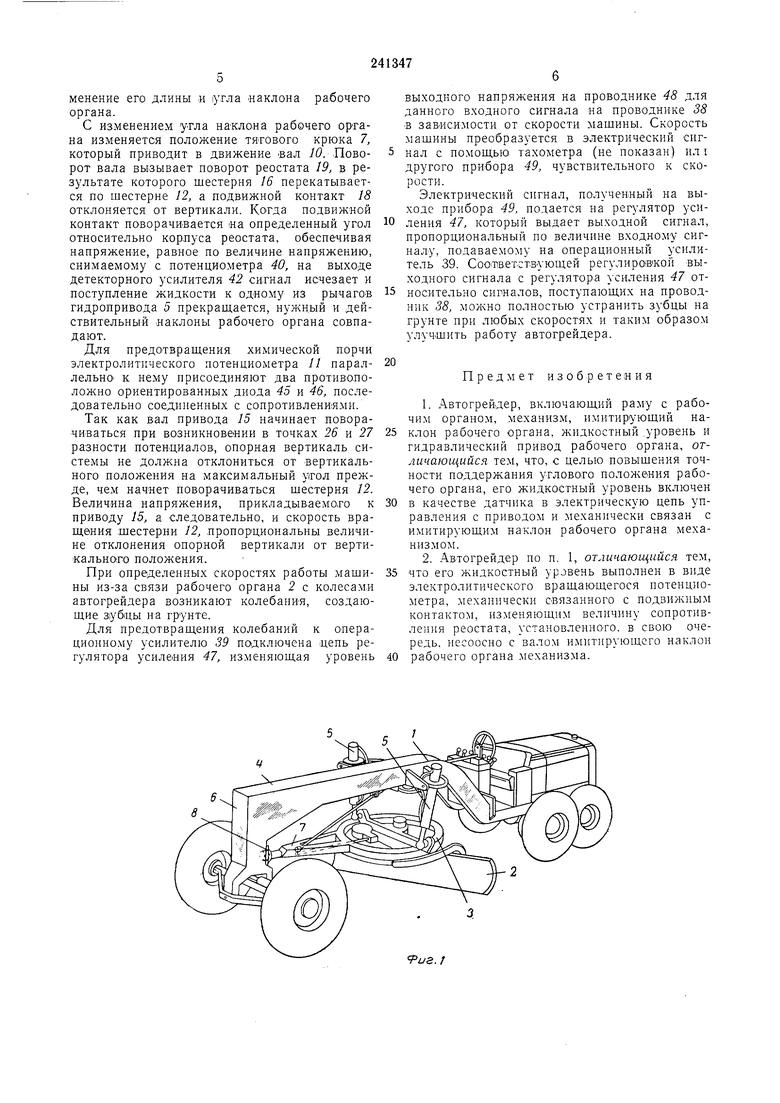
На фиг. 1 изображен описываемый автогрейдер в общем виде; на фиг. 2 - схема, поясняющая работу жидкостного уровня в системе поддержания углового положения рабочего органа.
Автогрейдер / содержит рабочий орган 2, поддерживаемый кругом 3, укрепленный на основной раме 4 посредством гидравлического привода 5. Круг соединен с буфером 6 автогрейдера тяговым крюком 7 с помощью шарнирного соединения 8.
Внутри щара шарнирного соединения 8 расположен имитирующий наклон рабочего органа механизм 9, который поворачивает вал 10 в результате наклона рабочего органа и поворота тягового крюка 7 вокруг своей оси. Рабочий орган 2 устанавливается в рабочее положение рычагами гидравлического привода 5. После этого фиксируется угол между рамой 4 автогрейдера и рабочим органом 2,
0 изменить который молчно изменением длины одного из рычагов гидропривода 5. Если автогрейдер работает на ровном .грунте, необходимый угол наклона рабочего органа к грунту поддерживается при статич.еском состоянии системы контроля.
Если передние колеса автогрейдера встречают неровность, то рама автогрейдера наклоняется, а так как рычаги гидропривода 5 остаются в том же положении, т. е. угол между рамой и рабочим органом прежний, рабочий орган также изменяет угол наклона к грунту. Для возвращения его в исходное положение необходимо удлинить или сжать один из рычагов гидропривода 5.
Для автоматического поддержания рабоче5го органа под определенным углом к грунт независимо от угла наклона рамы 4 необходимо точно измерить угловое отклонение рамы от исходного положения и скомпенснроропривода 5 изменением угла между рамой и рабочим органом.
В качестве опорной .вертикали для измерения угла наклона в предлагаемом грейдере предусмотрен электролитический потенциометр и, укрепленный на шестерне 12. Шестерня 12 может вращаться на. валу 10 л оцеплена с малой шестерней 13, насаженной на вал 14 привода 15. С шестер ней 12 сцеплена также вторая малая шестерня 16, закрепленная на одном конце вала 17, на другом которого смонтирован подвижной контакт 18 реостата 19, -установлецного на валу 10. Когда вал 10 поворачивается, реостат 19 также поворачивается относительно нецентральной оси. В результате шестерня 16 движется .вокруг шестерни 12, вал 17 врашастся и положение подвижного контакта 18 относительно корпуса реостата 19 изменяется. Сделав большим коэффициент передачи шестерен 12 и 13 (например, 1000 : 1), можно точно определить малые угловые изменения. Опорная вертикаль возвращается в исходное положение приводом 15. Величина трения между шестерней 12 и валом 17 и торможение, вызываемое шестерней 16, не оказывают заметного влияния на точность работы опорной вертикали.
Источником энергии является генератор 20, подающий напряжение на выходные сопротивления 21 и 22, сдвинутые по фазе одно относительного другого на 180°. Сопротивление 21 соединено с электродом 23 потенциометра, сопротивление 22 - с электродом 24.
Если потенциометр занимает горизонтальное положение, то ввиду того, что напряжения на выходах генератора 20 равны и сдвинуты на 180° по фазе и импеданс между электродом 23 и заземленным электродом 25 равен импедансу между электродом 24 и электродом 25, напряжения © точке 26 между сопротивлением 21 и электродом 23 и в точке 27 между сопротивлением 22 и электродом 24 будут также равны. При встрече автогрейдера с неровностью его рама наклоняется, в результате им:пе.дайсы выходными и заземленным электродами .изменяются, вызывая пропорциональные изменения относительных напряжений в точках 26 и 27.
Цепь детектора наклона 28 формируется двумя равными сопротивлениями 29 и 30, соединенными проводником 31. Сопротивление 29 соединено с катодом диода 32, анод которого связан с точкой 26 проБОДником 33. Сопротивление 30 соединено с анодом диода 34, катод которого связан с точкой 27 проводником 35.
Диоды 32 и 34 работают как полуволиовые выпрямители. Диод 32 пропускает только положительную составляющую напряжения с сопротивления 21, диод 34 - только отрицательную составляющую напряжения с сопротивления 22. Таким образом, напряжение на сопротивлении 29 имеет форму положительных импульсов, на сопротивлении 30 - отрицательных импульсов
Если опорная вертикаль находится в «сходном (потенциометр // - в горизонтальном) положении, напряжения на сопротивлениях 21 и 22 равны, т. е. положительные им.пульсы на
сопротивлении 29 равны отрицательным импульсам напряжения на сопротивлении 30 и ii проводнике 31 имеет место нулевой потенциал. Если же опорная вертикаль отклонилась от вертикального положения, то напряжения в Т01чках 26 и 27 не равны, а в проводнике 31 появлЯется положительное или отрицательное напряжение (знак определяется направлением наклона). на выходе дифференцирующей цепочки, состоящей из параллельно соединенных е.мкости 36 и сопротивления 37, появляемся напряжение, которое через проводник 38 подается на вход операционного усилителя 39. При отрицательном напряжеиии на входе операционного усилителя
привод 15 вращается в одном направлении, а при положительном - в другом. Привод будет вращаться до тех пор, пока потенциометр 11 не вернется в исходное (горизонтальное) положение, а напряжения в точках 26 и 27 не
станут равными. Так как угол, на который привод 15 должен повернуть шестерню 12, является точной мерой углового нахло.на рамы автогрейдера, то его можно использовать для определения величины укорочения нли удлинения рычагов гидропривода 5, чтобы удержать рабочий орган 2 под заданным углом. Угол поворота -шестерни 12 измеряется реостатом 19 и его подвижным контактом 18. С управляемого вручную потенциометра 40
снимается напряжение, соответствующее по величине нужному наклону рабочего органа, и через .проводник 41 подается на детекторный усилитель 42 ошибок наклона рабочего органа, снимаемое с подвижного контакта реостата 19, подается к детекторному усилителю 42 через проводник 43. Когда величина напряжения, соответствующая нужному наклону рабочего органа, равна величине напряжения, соответствующей действительному наклону
его, на выходе детекторного усилителя сигнал отсутствует, и наклон рабочего органа не меняется. Таки.м образом, если два сигнала на входе детекторного усилителя 42 равны до момента начала вращения шестерни 12, то во
время вращения шестерни, стремящейся занять опорное положение, сигналы на .входе детекторного усилителя 42 не будут равны, так каК положение подвижного контакта 18 изменится и величина напряжения, снимаемого с подвижного контакта, потенциометра, также изменится.
В результате неравенства величин напряжений, поступающих на вход детекторного усилителя, на выходе его возникает выходное напряжение, которое воздействует на электрогидравлические клапаны 44, управляющие скоростью прохождения жидкости к рычагам гидронривода 5. Жидкость направляется к одменение его длины и угла -наклона рабочего органа.
С изменением утла на-клона рабочего ортана изменяется положение тятового крюка 7, который приводит в движение вал 70. Поворот вала вызывает поворот реостата 19, в результате которого шестерня 16 перекатывается по шестерне 12, а подвижной контакт 18 отклоняется от вертикали. Когда подвижной контакт поворачивается «а определенный угол относительно корлуса реостата, обеспечивая напряжение, равное по величине напряжению, снимаемому с потенциометра 40, на выходе детекторного усилителя 42 сигнал исчезает и поступление жидкости к одному из рычагов гидропривода 5 прекраш,ается, нужный и действительный наклоны рабочего органа совпадают.
Для предотвраш,ения химической порчи электролитического потенциометра И параллельнО к нему присоединяют два противололожно ориентированных диода 45 и 46, последовательно соединенных с сопротивлени ями.
Так как вал привода 15 начинает поворачиваться при возникновении в точках 26 и 27 разности потенциалов, опорная вертикаль системы не должна отклониться от вертикального положения на максимальный угол прежде, чем начнет поворачиваться шестерня 12. Величина напряжения, прикладываемого к приводу 15, а следовательно, и скорость враш,ения шестерни 12, пропорциональны величине отклонения опорной вертикали от вертикального положения.
При определенных скоростях работы машины из-за связи рабочего органа 2 с колесами автогрейдера возникают колебания, создающие зубцы на грунте.
Для предотвращения колебаний к операционному усилителю 39 подключена цепь регулятора усиления 47, изменяющая уровень
выходного напряжения на проводнике 48 для данного входного сигнала на проводнике 38 в зависимости от скорости машины. Скорость машины преобразуется в электрический сигнал с помощью тахометра (не показан) ил i другого прибора 49, чувствительного к скорости.
Электрический сигнал, полученный на выходе прибора 49, подается на регулятор усиления 47, который выдает выходной сигнал, пропорциональный по величине входному сигналу, подаваемому на операционный усилитель 39. Соответствующей регулирО В1кой выходного сигнала с регулятора усиления 47 относительно сигналов, поступающих на проводник 38, можно полностью устранить зубцы на грунте при любых скоростях и таким образом улучшить работу автогрейдера.
Предмет изобретения
1.Автогрейдер, включающий раму с рабочим органом, механизм, имитирующий наклон рабочего органа, жидкостный .уровень и гидравлический привод рабочего органа, огличающийся тем, что, с целью повышения точности поддержания углового положения рабочего органа, его жидкостный уровень включен
в качестве датчика в электрическую цепь управления с приводом и механически связан с имитирующим наклон рабочего органа механизмом.
2.Автогрейдер по п. 1, отличающийся тем, что его жидкостный уровень выполнен в виде
электролитического вращаюшегося потенциометра, механически связанного с подвижным контактом, изменяющим величину сопротивления реостата, установленного, в свою очередь, несоосно с валом имитирующего наклон рабочего органа .механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛИЗАТОР РАБОТЫ ДВИГАТЕЛЯ ВНУТРЕННЕГО | 1973 |
|
SU363262A1 |
| АППАРАТ ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ ФОТОЭЛЕКТРОФОРЕЗОМ | 1973 |
|
SU404290A1 |
| ДИСКРИМИНАТОР ЧАСТОТЫ ДОППЛЕРА | 1971 |
|
SU318252A1 |
| ПЕРЕСТАВИТЕЛЬ КОЛЬЦА ЦЕНТРОБЕЖНОЙ ФОРМЫ ДЛЯ ИЗГОТОВЛЕНИЯ СТЕКЛОИЗДЕЛИЙ | 1972 |
|
SU358830A1 |
| УСТРОЙСТВО для РЕЗКИ СТЕКЛОИЗДЕЛИЙ | 1972 |
|
SU323898A1 |
| УСТРОЙСТВО для ПРОЕКТИРОВАНИЯ СВЕТОВОГО ИЗОБРАЖЕНИЯ | 1973 |
|
SU371737A1 |
| ПОГРУЗЧИК ПЕРИОДИЧЕСКОГО ДЕЙСТВИЯ | 1971 |
|
SU298111A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПРОДУКТОВ ПОЛИКОНДЕНСАЦИИ ОКСАЗОЛИДИНОВ с ПОЛИИЗОЦИАНАТАМИ | 1973 |
|
SU370783A1 |
| ШТАНГОВАЯ КРЕПЬ | 1973 |
|
SU393845A1 |
| РАБОЧИЙ ОРГАН К МАШИНЕ ДЛЯ ЗАПРЕССОВКИ | 1971 |
|
SU317227A1 |