борной установки вправо и влево и многопоэиционный переключатель. По сигналам датчиков блок 46 формирует управляющие сигналы на последователь. ную перезаколку свай 2-5 с помощью приводов 7 заглубления и подъема
свай, приводов 6 напорного хода на заданную длину шага. Рабочий цикл совмещен с поворотом грунтозаборной установки. Работа установки не прекращается и при шагании. 1 з.п. ф-лы 5 ил.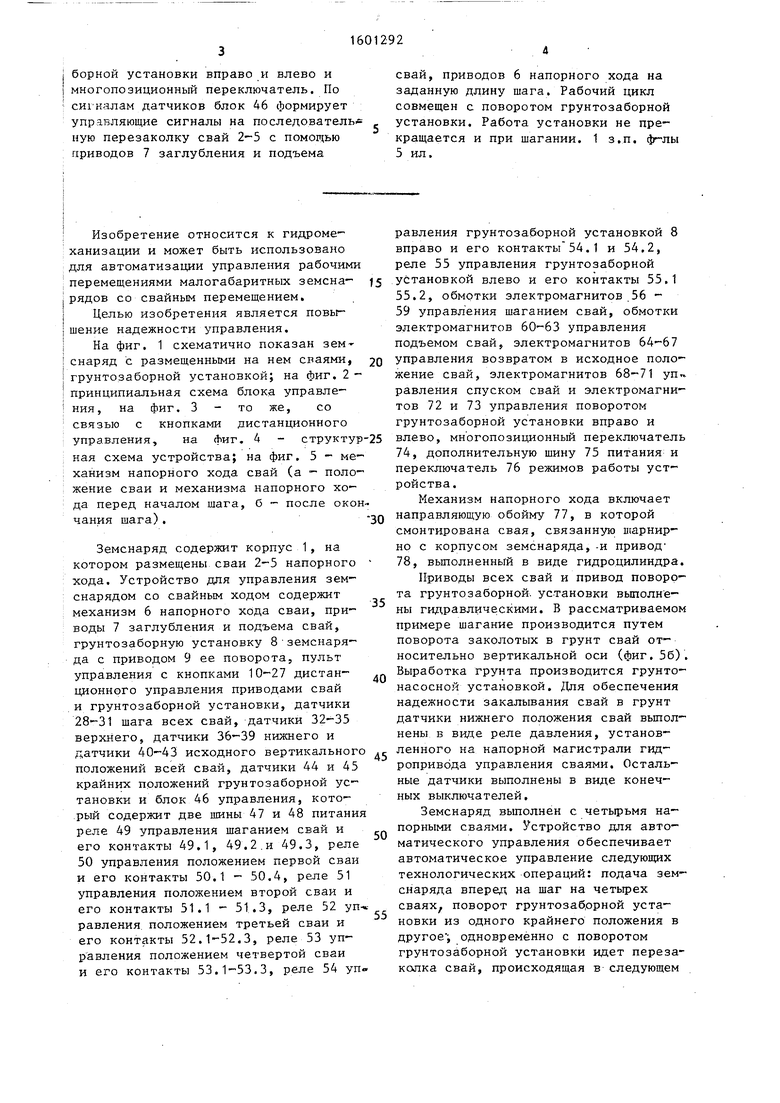
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ГЛУБИНЫ РАЗРАБОТКИ | 1969 |
|
SU248556A1 |
| Устройство управления производственными механизмами | 1991 |
|
SU1779543A1 |
| Устройство для определения положения экскавационной машины в пространстве | 1980 |
|
SU937622A1 |
| Групповая установка для сбора, замера и транспорта нефти и газа | 1960 |
|
SU140396A1 |
| Устройство для переноса трубных заготовок и его система управления | 1982 |
|
SU1103925A1 |
| Устройство для шагового позиционирования объекта | 1985 |
|
SU1335930A1 |
| Устройство для программного управления перемещением объекта | 1981 |
|
SU957170A1 |
| Устройство автоматизации обслуживания абонентов секретного отдела | 1968 |
|
SU1697093A1 |
| Многоканальное устройство сигнализации | 1979 |
|
SU855707A1 |
| Устройство для управления технологической линией | 1986 |
|
SU1381426A1 |
Изобретение относится к гидромеханизации и может быть использовано для автоматизации управления рабочими перемещениями малогабаритных земснарядов со свайным перемещением. Цель изобретения - повышение надежности управления. Для этого информация о положении свай 2-5 от датчиков 28-31 шага всех свай, датчиков 32-35 верхнего положения всех свай, датчиков 36-39 нижнего положения всех свай и датчиков 40-43 исходного вертикального положения всех свай поступает на информационные входы блока 46 управления. Туда же поступает информация с датчиков 44 и 45 крайних положений грунтозаборной установки земснаряда с приводом 9 ее поворота. Блок 46 управления содержит две шины питания, реле управления шаганием свай, четыре реле управления положением свай, два реле управления грунтозаборной установкой, электромагниты управления шаганием свай, подъемом свай, возвратом в исходное положение, управлением спуском свай, поворотом грунтозаборной установки вправо и влево и многопозиционный переключатель. По сигналам датчиков блок 46 формирует управляющие сигналы на последовательную перезаколку свай 2-5 с помощью приводов 7 заглубления и подъема свай, приводов 6 напорного хода на заданную длину шага. Рабочий цикл совмещен с поворотом грунтозаборной установки. Работа установки не прекращается и при шагании. 1 з.п. ф-лы, 5 ил.
Изобретение относится к гидромеханизации и может быть использовано для автоматизации управления рабочими перемещениями малогабаритных земсна- рядов со свайным перемещением.
Целью изобретения является повышение надежности управления.
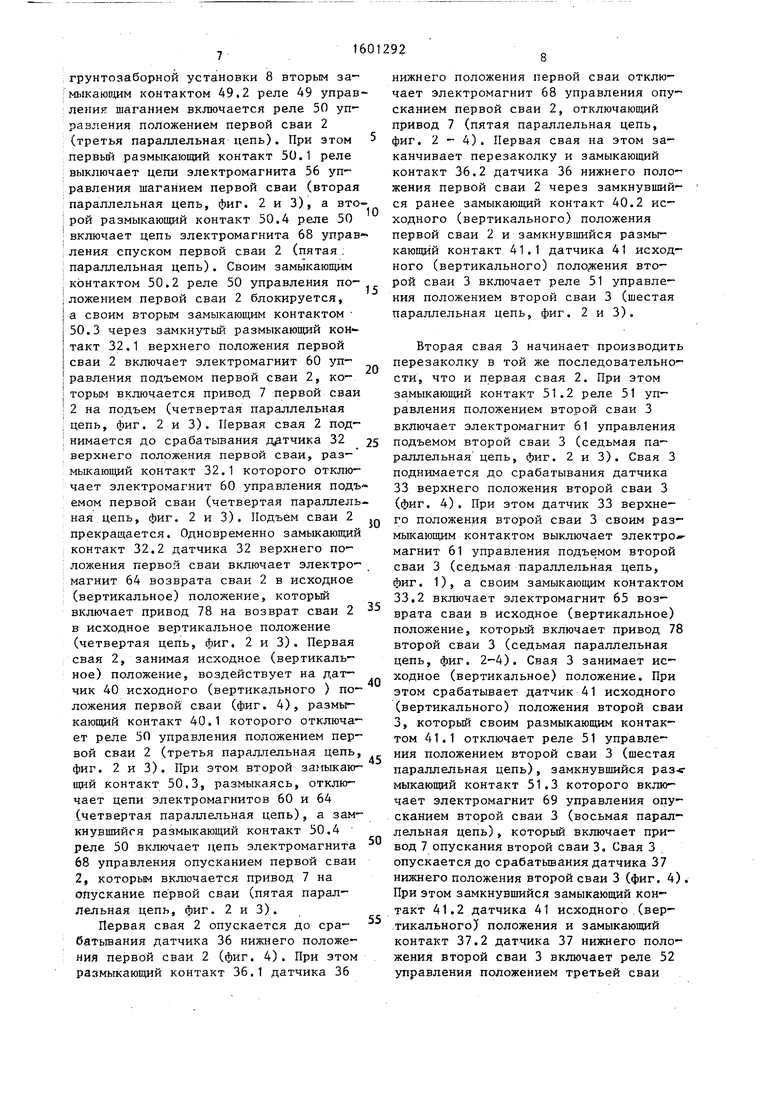
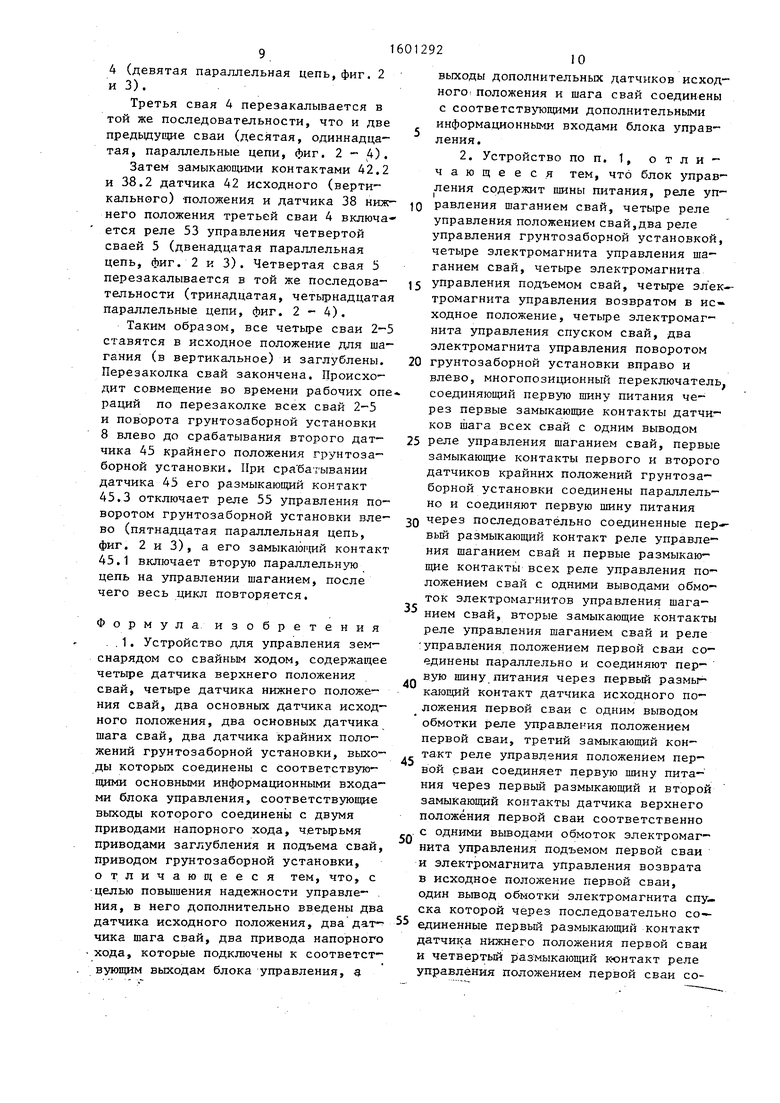
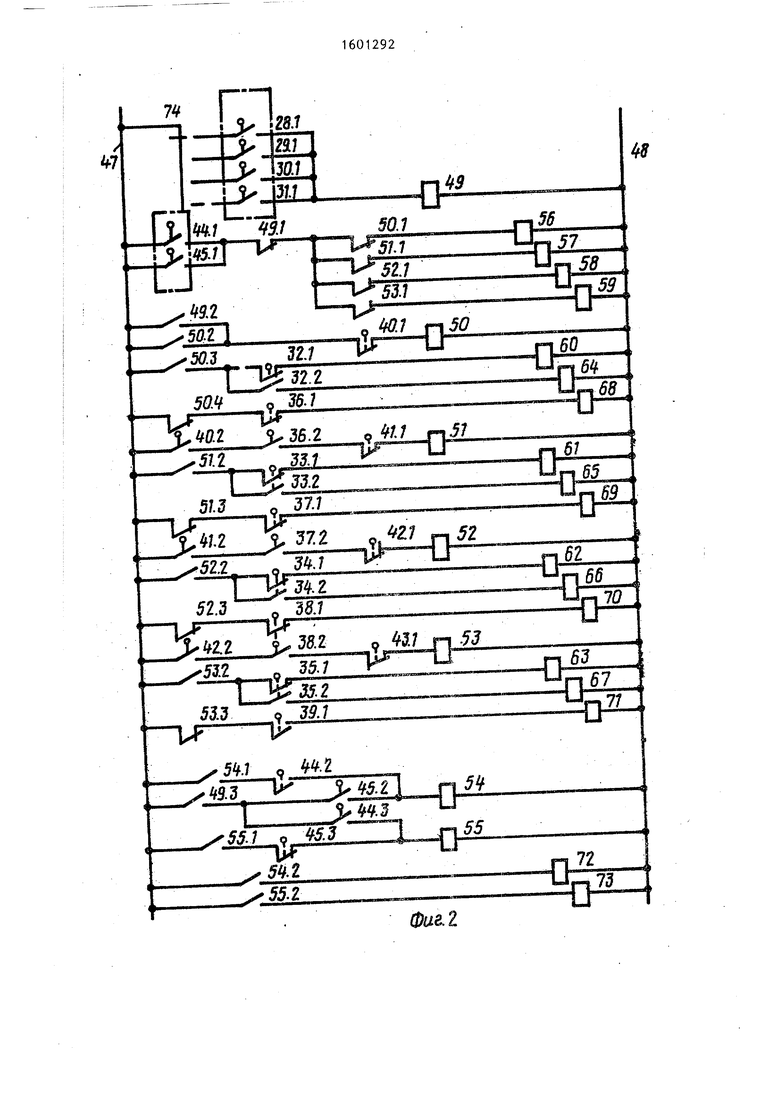
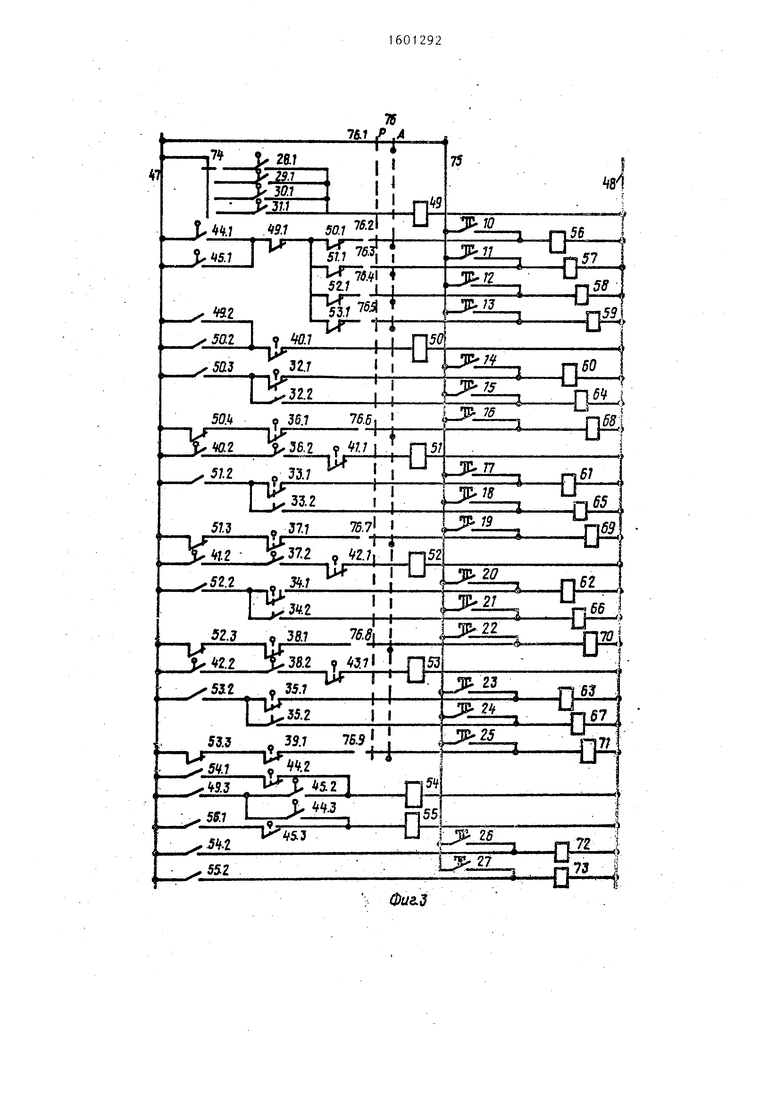
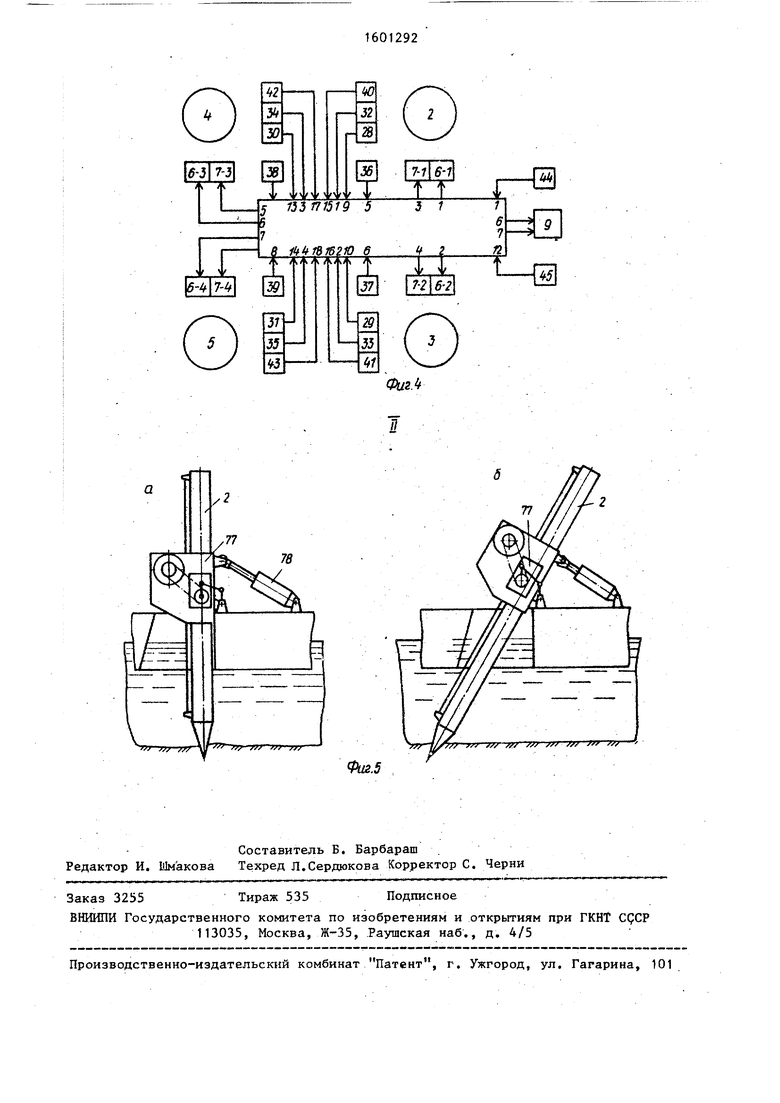
На фиг. 1 схематично показан земснаряд с размещенными на нем сваями, грунтозаборной установкой; на фиг. 2 - принципиальная схема блока управления, на фиг. 3 - то же, со связью с кнопками дистанционного управления, на фиг, 4 - структур ная схема устройства; на фиг. 5 - механизм напорного хода свай (а - положение сваи и механизма напорного хода перед началом шага, б - после окончания шага).
Земснаряд содержит корпус 1, на котором размещены сваи 2-5 напорного хода. Устройство для управления земснарядом со свайным ходом содержит механизм 6 напорного хода сваи, приводы 7 заглубления и подъема свай, грунтозаборную установку 8земснаряда с приводом 9 ее поворота, пульт управления с кнопками 10-27 дистан- ционного управления приводами свай и грунтозаборной установки, датчики 28-31 шага всех свай, датчики 32-35 верхнего, датчики 36-39 нижнего и датчики 40-43 исходного вертикального положений всей свай, датчики 44 и 45 крайних положений грунтозаборной установки и блок 46 управления, который содержит две шины 47 и 48 питани реле 49 управления шаганием свай и его контакты 49.1, 49.2.и 49.3, реле 50 управления положением первой сваи и его контакты 50.1 - 50.4, реле 51 управления положением второй сваи и его контакты 51.1 - 51.3, реле 52 уп равления положением третьей сваи и его контакты 52.1-52.3, реле 53 управления положением четвертой сваи и его контакты 53.1-53,3, реле 54 уп
5
0 5 0
Q
5
55
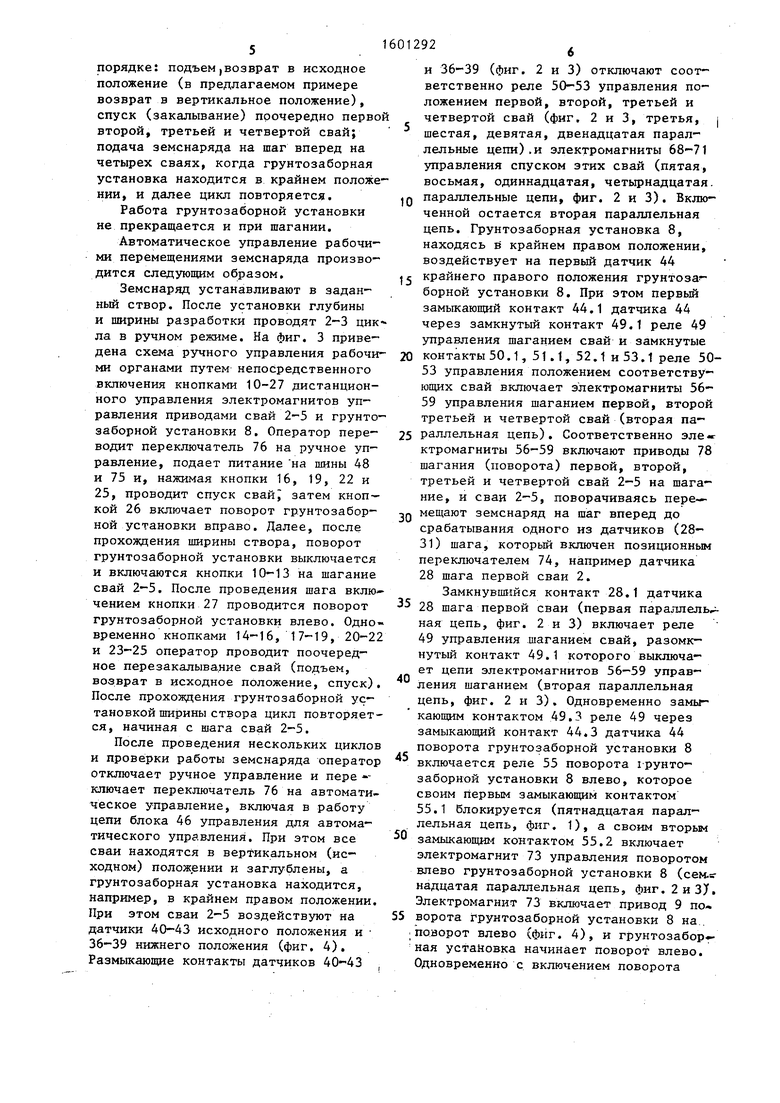
равления грунтозаборной установкой 8 вправо и его контакты 54.1 и 54.2, реле 55 управления грунтозаборной установкой влево и его контакты 55.1 55.2, обмотки электромагнитов .56 - 59 управления шаганием свай, обмотки электромагнитов 60-63 управления подъемом свай, электромагнитов 64-67 управления возвратом в исходное положение свай, электромагнитов 68-71 уп™ равления спуском свай и электромагнитов 72 и 73 управления поворотом грунтозаборной установки вправо и влево, мнЪгопозиционный переключатель 74, дополнительную шину 75 питания и переключатель 76 режимов работы устройства.
Механизм напорного хода включает направляющую обойму 77, в которой смонтирована свая, связанную шарнир- но с корпусом земснаряда, -и привод 78, выполненный в виде гидроцилиндра.
Приводы всех свай и привод поворота грунтозаборной. установки вьшолн е- ны гидравлическими. В рассматриваемом примере шагание производится путем поворота заколотых в грунт свай относительно вертикальной оси (фиг. 56). Выработка грунта производится грунто- насосной установкой. Лля обеспечения надежности закалывания свай в грунт датчики нижнего положения свай вьшол- нены в виде реле давления, установленного на напорной магистрали гидропривода управления сваями. Остальные датчики выполнены в виде конечных выключателей.
Земснаряд выполнен с четырьмя напорными сваями. Устройство для автоматического управления обеспечивает автоматическое управление следующих технологических операций: подача земснаряда вперед на шаг на четьфех сваях, поворот грунтозаборной установки из одного крайнего положения в дpyгoe j одновременно с поворотом грунтозаборной установки идет перезаколка свай, происходящая в следующем
порядке: подъем,возврат в исходное положение (в предлагаемом примере возврат в вертикальное положение), спуск (закалывание) поочередно перво второй, третьей и четвертой свай; подача земснаряда на шаг вперед на четырех сваях, когда грунтозаборная установка находится в крайнем положении, и далее цикл повторяется.
Работа грунтозаборной установки не прекращается и при шагании.
Автоматическое управление рабочими перемещениями земснаряда производится следующим образом.
Земснаряд устанавливают в заданный створ. После установки глубины и ширины разработки проводят 2-3 цикла в ручном режиме. На фиг. 3 приведена схема ручного управления рабочими органами путем непосредственного включения кнопками 10-27 дистанционного управления электромагнитов управления приводами свай 2-5 и грунтозаборной установки 8. Оператор переводит переключатель 76 на ручное управление, подает питание на шины 48 и 75 и, нажимая кнопки 16, 19, 22 и 25, проводит спуск свай затем кнопкой 26 включает поворот грунтозабор- ной установки вправо. Далее, после прохождения ширины створа, поворот грунтозаборной установки выключается и включаются кнопки 10-13 на шагание свай 2-5. После проведения шага включением кнопки 27 проводится поворот грунтозаборной установки влево. Одновременно кнопками 14-16, 17-19, 20-22 и 23-25 оператор проводит поочередное перезакалывание свай (подъем, возврат в исходное положение, спуск). После прохождения грунтозаборной установкой ширины створа цикл повторяется, начиная с шага свай 2-5.
После проведения нескольких циклов и проверки работы земснаряда оператор отключает ручное управление и пере -- ключает переключатель 76 на автоматическое управление, включая в работу цепи блока 46 управления для автоматического управления. При этом все сваи находятся в вертикальном (исходном) положении и заглублены, а грунтозаборная установка находится, например, в крайнем правом положении. При этом сваи 2-5 воздействуют на датчики 40-43 исходного положения и 36-39 нижнего положения (фиг. 4). Размыкающие контакты датчиков 40-43
10
15
20
6
и 36-39 (фиг. 2 и 3) отключают соответственно реле 50-53 управления положением первой, второй, третьей и четвертой свай (фиг. 2 и 3, третья, i шестая, девятая, двенадцатая параллельные цепи).и электромагниты 68-71 управления спуском этих свай (пятая, восьмая, одиннадцатая, четырнадцатая, параллельные цепи, фиг. 2 и 3). Включенной остается вторая параллельная цепь. Грунтозаборная установка 8, находясь в крайнем правом положении, воздействует на первый датчик 44 крайнего правого положения грунтоза - борной установки 8. При этом первьш замьжаюшлй контакт 44.1 датчика 44 через замкнутый контакт 49.1 реле 49 управления шаганием свай и замкнутые контакты 50.1, 51 .1, 52.1 и 53.1 реле 50- 53 управления положением соответству- юпщх свай включает электромагниты 56- 59 управления шаганием первой, второй третьей и четвертой свай (вторая па- 25 раллельная цепь). Соответственно эле ктромагниты 56-59 включают приводы 78 шагания (поворота) первой, второй, третьей и четвертой свай 2-5 на шагание, и сваи 2-5, поворачиваясь пере- 20 мещают земснаряд на шаг вперед до срабатывания одного из датчиков (28- 31) шага, который включен позиционным переключателем 74, например датчика 28 шага первой сваи 2.
Замкнувшийся контакт 28.1 датчика 28 шага первой сваи (первая параллель, ная цепь, фиг. 2 и 3) включает реле 49 управления шаганием свай, разомкнутый контакт 49.1 которого выключает цепи электромагнитов 56-59 управления шаганием (вторая параллельная цепь, фиг. 2 и 3). Одновременно замыкающим контактом 49.3 реле 49 через замыкающий контакт 44.3 датчика 44 поворота грунтозаборной установки 8 включается реле 55 поворота i-рунто- заборной установки 8 влево, которое своим первым замыкающим контактом 55.1 блокируется (пятнадцатая параллельная цепь, фиг. 1), а своим вторьм замыкающим контактом 55.2 включает электромагнит 73 управления поворотом влево грунтозаборной установки 8 (сем.- надцатая параллельная цепь, фиг. 2 и ЗУ. Электромагнит 73 включает привод 9 по« ворота грунтозаборной установки 8 на . поворот влево (фиг. 4), и грунтозабор ная установка начинает поворот влево. Одновременно с включением поворота
40
45
50
55
грунтозаборной установки 8 вторым за- мыкаюидим контактом 49.2 реле 49 управления шаганием включается реле 50 управления положением первой сваи 2 (третья параллельная цепь). При этом первый размыкающий контакт 50.1 реле выключает цепи электромагнита 56 управления шаганием первой сваи (вторая параллельная цепь, фиг. 2 и 3), а вто рой размыкающий контакт 50.4 реле 50 включает цепь электромагнита 68 управления спуском первой сваи 2 (пятая . параллельная цепь). Своим замыкающим контактом 50.2 реле 50 управления положением первой сваи 2 блокируется, а своим вторым замыкающим контактом 50.3 через замкнутый размыкающий контакт 32.1 верхнего положения первой сваи 2 включает электромагнит 60 управления подъемом первой сваи 2, которым включается привод 7 первой сваи 2 на подъем (четвертая параллельная цепь, фиг. 2 и 3). Первая свая 2 поднимается до срабатывания датчика 32 верхнего положения первой сваи, размыкающий контакт 32.1 которого отключает электромагнит 60 управления подъ емом первой сваи (четвертая параллельная цепь, фиг. 2 и 3). Подъем сваи 2 прекращается. Одновременно замыкаюшд й контакт 32.2 датчика 32 верхнего положения первой сваи включает электромагнит 64 возврата сваи 2 в исходное (вертикальное) положение, которьш включает привод 78 на возврат сваи 2 в исходное вертикальное положение (четвертая цепь, фиг. 2 и 3). Первая свая 2, занимая исходное (вертикальное) положение, воздействует на датчик 40 исходного (вертикального ) положения первой сваи (фиг. 4), размыкающий контакт 40.1 которого отключает реле 50 управления положением первой сваи 2 (третья параллельная цепь фиг. 2 и 3). При этом второй замыкающий контакт 50,3, размыкаясь, отключает цепи электромагнитов 60 и 64 (Четвертая параллельная цепь), а замкнувшийся размыкающий контакт 50.4 реле 50 включает цепь электромагнита 68 управления опусканием первой сваи 2, которым включается привод 7 на опускание пе рвой сваи (пятая параллельная цепь, фиг. 2 и 3).
Первая свая 2 опускается до сра- батьшания датчика 36 нижнего положения первой сваи 2 (фиг. 4). При этом размыкающий контакт 36.1 датчика 36
0
5
0
5
5
0
5
0
5
нижнего положения первой сваи отключает электромагнит 68 управления опусканием первой сваи 2, отключающий привод 7 (пятая параллельная цепь, фиг. 2-4). Первая свая на этом заканчивает перезаколку и замыкающий контакт 36.2 датчика 36 нижнего положения первой сваи 2 через замкнувшийся ранее замыкаюш й контакт 40.2 исходного (вертикального) положения первой сваи 2 и замкнувшийся размы- кaюшJ й контакт 41.1 датчика 41 исходного (вертикального) положения второй сваи 3 включает реле 51 управления положением второй сваи 3 (шестая параллельная цепь, фиг. 2 и 3).
Вторая свая 3 начинает производить перезаколку в той же последовательности, что и первая свая 2. При этом замыкающий контакт 51.2 реле 51 управления положением второй сваи 3 включает электромагнит 61 управления подъемом второй сваи 3 (седьмая параллельная цепь, фиг. 2 и 3). Свая 3 поднимается до срабатывания датчика 33 верхнего положения второй сваи 3 (фиг. 4). При этом датчик 33 верхнего положения второй сваи 3 своим размыкающим контактом выключает злектро-- магнит 61 управления подъемом второй сваи 3 (седьмая параллельная цепь, фиг. 1), а своим замыкающим контактом 33.2 включает электромагнит 65 возврата сваи в исходное (вертикальное) положение, который включает привод 78 второй сваи 3 (седьмая параллельная цепь, фиг. 2-4). Свая 3 занимает исходное (вертикальное) положение. При этом срабатывает датчик 41 исходного (вертикального) положения второй сваи 3, который своим размыкающим контактом 41.1 отключает реле 51 управления положением второй сваи 3 (шестая параллельная цепь), замкнувшийся разчг мыкающий контакт 51.3 которого включает электромагнит 69 управления опусканием второй сваи 3 (восьмая параллельная цепь), который включает привод 7 опускания второй сваи 3, Свая 3 опускается до срабатьшания датчика 37 нижнего положения второй сваи 3 (фиг. 4) . При этом замкнувшийся замыкающий контакт 41.2 датчика 41 исходного (вертикального) положения и замыкающий контакт 37.2 датчика 37 нижнего положения второй сваи 3 включает реле 52 управления положением третьей сваи
4 (девятая параллельная цепь, фиг. 2 и 3).
Третья свая 4 перезакалывается в той же последовательности, что и две предыдущие сваи (десятая, одиннадцатая, параллельные цепи, фиг. 2 - 4). Затем замыкающими контактами 42.2 и 38.2 датчика 42 исходного (вертикального) -положения и датчика 38 нижнего положения третьей сваи 4 включается реле 53 управления четвертой сваей 5 (двенадцатая параллельная цепь, фиг. 2 и 3). Четвертая свая 5 перезакалывается в той же последовательности (тринадцатая, четырнадцата параллельные цепи, фиг. 2-4).
Таким образом, все четыре сваи 2ставятся в исходное положение для шагания (в вертикальное) и заглублены. Перезаколка свай закончена. Происходит совмещение во времени рабочих one раций по перезаколке всех свай 2-5 и поворота грунтозаборной установки 8 влево до срабатывания второго датчика 45 крайнего положения грунтозаборной установки. При сра батывании датчика 45 его размыкающий контакт 45.3 отключает реле 55 управления поворотом грунтозаборной установки влево (пятнадцатая параллельная цепь, фиг. 2 и 3), а его замыкаюгщй контакт 45.1 включает вторзто параллельную цепь на управлении шаганием, после чего весь цикл повторяется.
Формула изобретения . .1. Устройство для управления земснарядом со свайным ходом, содержащее четыре датчика верхнего положения свай, четыре датчика нижнего положения свай, два основных датчика исходного положения, два основных датчика шага свай, два датчика крайних положений грунтозаборной установки, выходы которых соединены с соответствующими основными информационными входами блока управления, соответствующие выходы которого соединены с двумя приводами напорного хода, четырьмя приводами заглубления и подъема свай, приводом грунтозаборной установки, отличаюп;ееся тем, что, с целью повышения надежности управления, в него дополнительно введены два датчика исходного положения, два дат- чика шага свай, два привода напорного хода, которые подключены к соответствующим выходам блока управления, а
1601292
10
10
20
выходы дополнительных датчиков исходного- положения и шага свай соединены с соответствующими дополнительными информационными входами блока управления.
кающий контакт датчика исходного по- ложения первой сваи с одним выводом обмотки реле управления положением первой сваи, третий замыкающий кон такт реле управления положением первой сваи соединяет шину пита- НИН через первый размыкающий и второй замыкающий контакты датчика верхнего положения первой сваи соответственно
Q с одними выводами обмоток электромагнита управления подъемом первой сваи и электромагнита управления возврата в исходное положение первой сваи, один вьшод обмотки электромагнита спуска которой через последовательно со единенные первьй размыкающий контакт датчика нижнего положения первой сваи и четвертый размыкающий к-онтакт реле управления положением первой сваи соединен с первой шиной питания, после довательно соединенные вторые замыка ющие контакты датчика исходного положения первой сваи и датчика нижнего положения первой сваи соединяют первую шину питания через первый размыкающий контакт датчика исходного по- :ложения второй сваи с одним вьшодом :обмотки реле управления положением ;второй сваи, второй замыкающий кон- :такт которого соединяет первую пшну питания через первый размыкающий и :второй замыкающий контакты датчика 1 верхнего положения второй сваи соот- Iветственно с одними выводами обмоток электромагнита управления подъемом ; второй сваи и электромагнита управле- :ния возврата в исходное положение вто рой сваи, один вывод обмотки элект- ромагнита спуска которой через после- довательно соединенные первый размыка- |ющий контакт датчика нижнего положения второй сваи и третий размыкающий контакт реле управления положением второй сваи соединен с первой шиной ;питания, последовательно соединенные :вторые замыкаюпще контакты датчика ис« ходного положения второй сваи и датчика нижнего положения второй сваи со единяют первую шину питания через первый размыкающий контакт датчика исходного положения третьей сваи с одним выводом обмотки реле управления положением третьей сваи, второй замы кающий контакт которого соединяет пер вую шину питания через первый размыкающий и второй замыкающий контакты датчика верхнего положения третьей сваи соответственно с одними выводами обмоток электромагнита управления подъемом третьей сваи и электромагнита управления возврата в исходное положение третьей сваи, один вьшод обмотки электромагнита спуска которой через последовательно соединенные пер вый размыкающий контакт датчика нижнего положения третьей сваи и третий размыкающий контакт реле управления положением третьей сваи соединен с первой щиной питания, последовательно соединенные вторые замыкающие контакты датчика исходного положения третье сваи и датчика нижнего положения третьей сваи соединяют первую шину пита
ния через первый размыкающий контакт 1 датчика исходного положения четвертой сваи с одним выводом реле управления положением четвертой сваи, второй зад0 s д
40
45
50
55
мыкающий контакт которого соединяет первую шину питания через первый размыкающий и второй замыкающий контакты датчика верхнего положения четвертой сваи соответственно с одними выводами обмоток электромагнита управления подъемом четвертой сваи и электромагнита управления возврата в исходное положение четвертой сваи, один вывод электромагнита спуска которой через последовательно соединенные первый замыкаюший контакт датчика нижнего положения четвертой сваи и третий размыкающий контакт реле управления четвертой сваи соединен с первой шиной питания, первый замыкающий контакт первого реле управления грунто- заборной установки соединяет первую шину питания через второй размыкающий контакт первого датчика крайнего положения грунтозаборной установки с одним выводом обмотки первого реле управления грунтозаборной установки, второй замыкагошлй контакт которого соединяет первую шину питания с одним выводом обмотки первого электромагнита управления поворотом грунтозабор-. ной установки вправо, третий замыкающий контакт реле управления шаганием свай соединяет первую шину питания через второй замыкающий контакт второго датчика крайнего положения грунтозаборной установки с одним выводом обмотки первого реле управления грунтозаборной установки и через третий замыкающий контакт первого датчика крайнего положения грунтозаборной установки с одним выводом обмотки второго реле управления грунтозаборной установки, первый замыкающий контакт которого соединяет первую шину питания через третий размыкающий контакт второго датчика крайнего положения грунтозаборной установки с одним вьшодом обмотки второго реле управления грунтозаборной установки,второй замыкающий контакт которого соединяет первую шину питания с одним выводом второго электромагнита управления поворотом грунтозаборной установки влево, другие выводы обмоток всех реле и электромагнитов соединены с второй шиной питания, выходы элект-- ромагнитов управления шаганием свай и возврата в исходное положение являются выходами блока управления для связи с приводами напорного хода, выходы электромагнитов управления подъ 131601292
sjo™ ,„° г :г„г™,. zzr - ,
MH подъема „ свай Zr ° грунтозаборной
элек.р„„аг„„™в .правл нГя „L OTсв::а „°„Г со Г ,
.рун.„,а6ор„„й у..а„свк„ вправо /,л:, инф р ионИг Г
4
Фаг. 2
W
Ш
Фи2.5
28
3 Ms-f
XT
Щ

| Свирщевский Ю | |||
| И | |||
| Принципы и основы теории проектирования машин для регулировочных мероприятий на реках, водоприемниках | |||
| - Минск: Высшая школа, 1978, с | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
