Изобретение относится к электрическим приспособлениям для запуска двигателя, точнее, к системам автоматического запуска и управления режимами двигателя.
Известные системы запуска и управления, применяемые при эксплуатации летательных аппаратов, выполнены на реЛе различных типов. Из-за свойственных реле недостатков (залипание и пезамыкание контактов, недостаточная герметичность, большой вес) системы, выполненные на них, имеют сравнительно небольшую надежность и большой вес.
Целью изобретения является создание микроэлектронного прибора для запуска и управления режимами двигателя, обеспечивающего все режимы его работы как в воздухе, так и на земле.
В устройстве предложенной конструкции временной механизм выполнен в виде логически полной микроэлектронной схемы типа «трапеция, на вход и выход которой подключены преобразователи аналог-код.
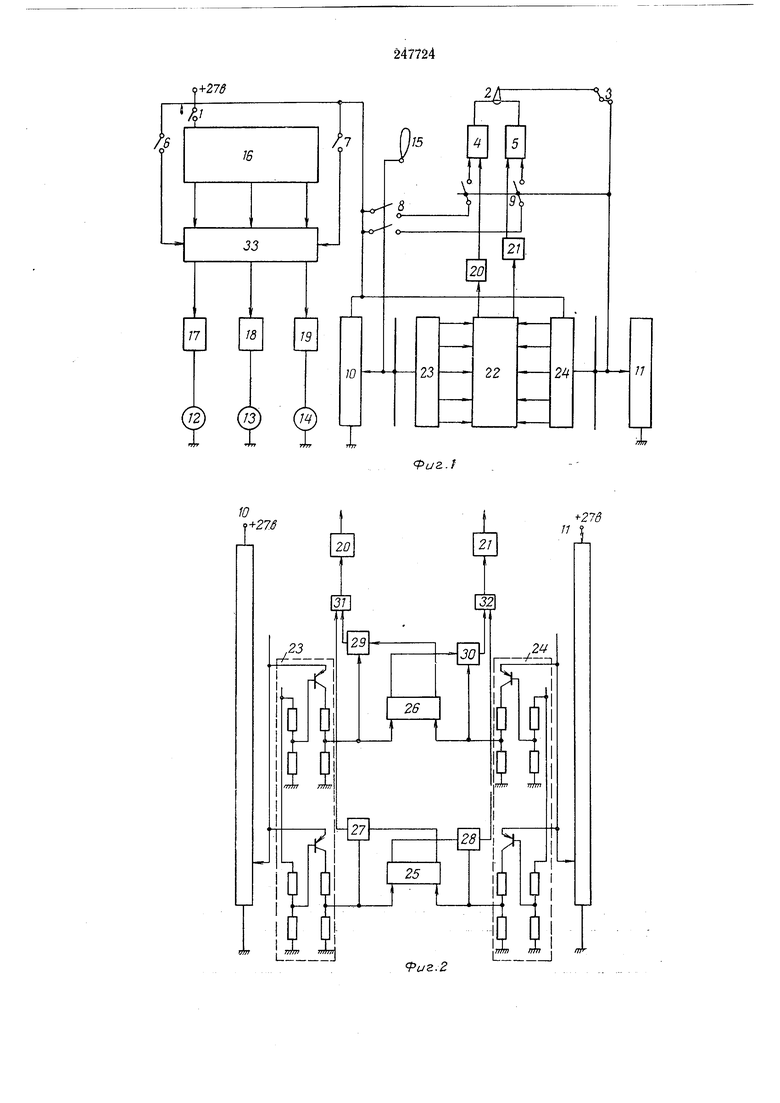
На фиг. 1 представлена блок-схема микроэлектронного устройства для запуска и управления режимами двигателя; на фиг. 2 - логическая схема управления всережимным соплом.
5 - гндр.оагрегаты форсажа и максимала соответственно; 6 - датчик числа оборотов; 7 - тумблер включения дополнительных режимов; 8, 9 - конечные выключатели дофорсажных режимов; 10, 11 - датчики рассогласования и обратной связи соответственно; 12-14 - исполнительные клапаны; 15 - ручка управления режимами; 16 - электронные часы; 17- 21 - электронные усилители; 22-микроэлектронный, блок всережимного управления; 23, 24 - преобразователь аналог-код; 25, 26 - триггер; 27-30 - схемы совпадения; 31, 32- схемы объединения; 33 - логическое устройство запуска.
В предложенном микроэлектронном приборе для запуска и управления режимами двигателя автомат времени выполнен в виде электронных часов 16, дающих необходимую сетку времени. Эти сигналы поступают на логическое устройство 33, откуда при наличии разрешающих сигналов от датчика 6 числа оборотов тумблера включения прокрутки проходят на усилители 17-19, а затем на исполнительные клапаны 12-14. Запуск производится кнопкой 1.
Режим двигателя зависит от положения ручки 15, замыкающей конечные выключатели 5, что приводит к включению гидроагрегатов 4 и 5, которые перемещают створки 2 сопла, механически связанные с конечными выключателями 9. При достижении соплом определенного положения гидроагрегаты 4, 5 выключаются. Таким образом, существует однозначное соответствие между положением ручки 5 и углом раскрытия створок сонла на дофорсажных режимах.
Всерел имное управление обеспечено микроэлектронным блоком 22. Сигнал рассогласования с датчика 10, введенный ручкой 15, приводит к включению одной, нескольких или всех секций преобразователя аналог-код 23 (в зависимости от величины сигнала рассогласования). Включенные секции этого преобразователя в свою очередь включают пропорциональное число элементов рассогласования в блоке 22 всережимного управления. Сигнал, полученный в блоке 22, в зависимости от знака подается на усилитель 20 и гидроагрегат 4 или на усилитель 21 и гидроагрегат 5, перемещающие створки сопла, механически связанные с датчиком 11 обратной связи. По мере передвижения ползунка по датчику 11 включаются секции преобразователя аналог-код 24, которые в свою очередь отключают соответствующее число элементов рассогласования в блоке 22. После того как сигнал рассогласования будет выбран датчиком обратной связи, на преобразователе аналог-код 24 будег включено столько же секций, сколько на преобразователе аналог-код 23, что приведет к взаимной компенсации элементов рассогласования в блоке всережимного управления и тем самым прекращению подачи сигнала на перемещение створок сопла. Створки сопла останутся в новом положении, соответствующем положению ручки 15.
На фиг. 2 представлена логическая схема управления всерел имным соплом. Предположим, что сигнал на датчике рассогласования 10 таков, что включилась нервая секция преобразователя аналог-код 23. Это значит, что появились сигналы на левом входе триггера 25 и схеме совпадения 27. Приходящий с правого выхода триггера 25 сигнал открывает схему совпадения 27 и через схему объединения 31 проходит на вход усилителя 20 и гидроагрегат форсажа 4, что приводит к перемещению створок соила. Ползунок датчика 11 обратиой связи достигает уровня, при котором включается первая секция преобразователя аналог- код 24.
На левом входе триггера 25 п схемы совпадения 28 появляются сигиалы. Если на обоих входах триггера есть сигнал, то на выходах сигналы отсутствуют. Это значит, что на схемах совпадения 27, 28 сигналы отсутствуют.
Сигнал на гидроагрегате форсажа 4 пропадает, створки сопла и механически связанный с ним ползунок датчика 11 останавливаются. Если увеличить сигнал на датчике рассогласования 10 до включения второй секции преобразователя аналог-код 23, то на входе схемы совпадения 29 и правом выходе триггера 26 появится сигнал, приводящий к появлению сигнала на выходе схемы совиадения 29 и
включению через схему объединения 31 и усилитель 20 гидроагрегата форсажа 4. В свою очередь, гидроагрегат форсажа подтягивает через створки сопла ползунок датчика 11 до напряжения включения второй секции преобразователя аналог-код 24. Тем самым на выходах триггера 26 сигналы исчезают, что приводит к выключению гидроагрегата форсажа и остановке створок сопла. Если уменьщить сигнал на датчике рассогласования 10 до выключения второй секции преобразователя аналог-код 23, то на входе схемы совпадения 29 и левом входе триггера 26 сигнал исчезает, а на входе схемы совпадения 30 и правом входе триггера 26 сигнал остается. Это значит, что на левом выходе триггера 26 появляется сигнал. На выходе схемы совпадения 30 появляется сигнал, который пройдя схему объединения 32, усилитель 31; включает гидроагрегат максимала 5, который
перемещает створки сопла в противоположном направлении. Ползунок на датчике обратной связи 11 перемещается до напряжения выключения второй секции преобразователя аналог-код 24 и тем самым пропадания на схеме
совпадения 30 сигнала. Гидроагрегат максим-ала 5 огключается, и створки сопла останавливаются. На датчиках рассогласования 10 и обратной связи // необходимым количеством секций преобразователя аналог-код 23, 24
молшо задать необходимое количество точек дискретного управления.
Предмет изобретения
Устройство для запуска и управления режимами двигателя, содержащее временнбй механизм, управляющий исполнительными гидроагрегатами створок реактивного сопла по сигналам от ручки унравления, и датчик обратной связи, отличающееся тем, что, с целью cнилveния веса и повыщения надежности, временной механизм выполнен в виде логически полной микроэлектронной схемы типа «трапеция, на вход и выход которой подключены преобразователи аналог-код.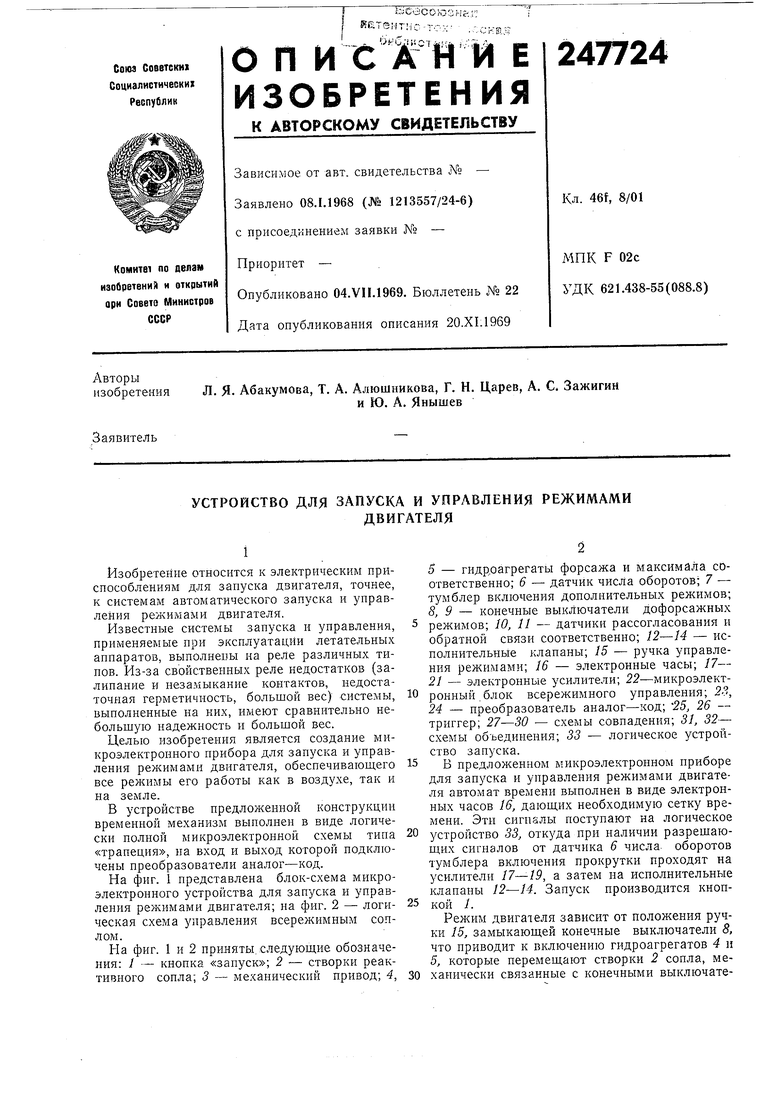
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466287C1 |
| ЦИФРОВОЙ КОМПЕНСАТОР ПЕРЕМЕННОГО ТОКА С ДИСКРЕТНЫМ УРАВНОВЕШИВАНИЕМ | 1967 |
|
SU197751A1 |
| ЦИФРОВОЙ СЛЕДЯЩИЙ КОМПЕНСАТОР | 1967 |
|
SU205138A1 |
| АВТОМАТИЧЕСКИЙ КОНТРОЛЬНО-ПРОПУСКНОЙ ПУНКТ | 1973 |
|
SU399890A1 |
| АВТОМАТИЧЕСКИЙ КОНТРОЛЬНО-ПРОПУСКНОЙ ПУНКТ | 1972 |
|
SU435547A1 |
| ЦИФРОВАЯ СЕЙСМОРАЗВЕДОЧНАЯ СТАНЦИЯ | 1973 |
|
SU396648A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631974C2 |
| КРЫЛАТАЯ РАКЕТА | 2013 |
|
RU2534838C1 |
| Устройство для синхронизации раздельных носителей звука и изображения | 1979 |
|
SU930201A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |