Изобретение относится к мукомольной промышленности, а именно к оборудованию по подготовке зерна к помолу.
Известны машины для отделения тяжелых примесей от зерна и тому подобных продуктов, состояш,ие из привода, сообш;ающего им круговое поступательное движение, загрузочного устройства, кузова, набранного из рам, выполненных с вертикальными каналами для нараллельного подвода продукта и с конусообразной рабочей поверхностью, имеюшей цилиндрический борт у основания, горизонтальную плош;адку с козырьком и центрально установленный воронкообразный патрубок для выхода очищенного нродукта.
Входное отверстие для подлежащего очистке продукта размешено в борту каждой конусообразной рабочей поверхности напротив окончания канала, а выходное для примесей- также в борту, но вблнзи козырька. Роль сборлика примесей в известных машинах играют нижние рамы с выходным отверстием, перекрытым заслонкой, периодически открываемой вручную.
Для повышения эффективности очистки и обеспечения автоматического выпуска примесей по мере их накопления в предлагаемой машине сборник примесей снабжен сообщенным с ним перепускными коробками устройством для автоматического контроля процесса
очистки, причем заслонка выпускного отверстия имеет соленоидный привод, управляемый этим устройством.
Устройство автоматического контроля процесса очистки следует выполнить состоящим из кузова, смонтированного в нижней части машины и содержащего две рамы с конусообразной рабочей поверхностью, и датчика веса для управления соленоидным приводом заслонки выпускного для примесей отверстия. Последнее целесообразно выполнить в рабочей поверхности нижней рамы устройства.
Воспринимающий элемент датчика может представлять собой перекрывающую отверстие в рабочей поверхности нижней рамы устройства мембрану с установленной под ней шайбой и служащей для воздействия на рычаг датчика. Воспринимающим элементом датчика быть также сама рабочая новерхность нил:ней рамы устройства, закрепленная на эксцентрично установленных шарнирах и удерживаемая в горизонтальном положении рычагом датчика.
Для ускорения процесса отделения зерна от примесей у борта рабочей поверхности каждой рамы на высоте от днища, равной не более 10 мм, следует равномерно установить под углом планки, а в воронкообразных патрубках каждой рамы - по паре пластин-сбрасывателей.
Для ускорения процесса удаления отделен ных примесей с рабочих поверхностей рам на горизонтальных площадках последних целесообразно смонтировать направляющие гонки.
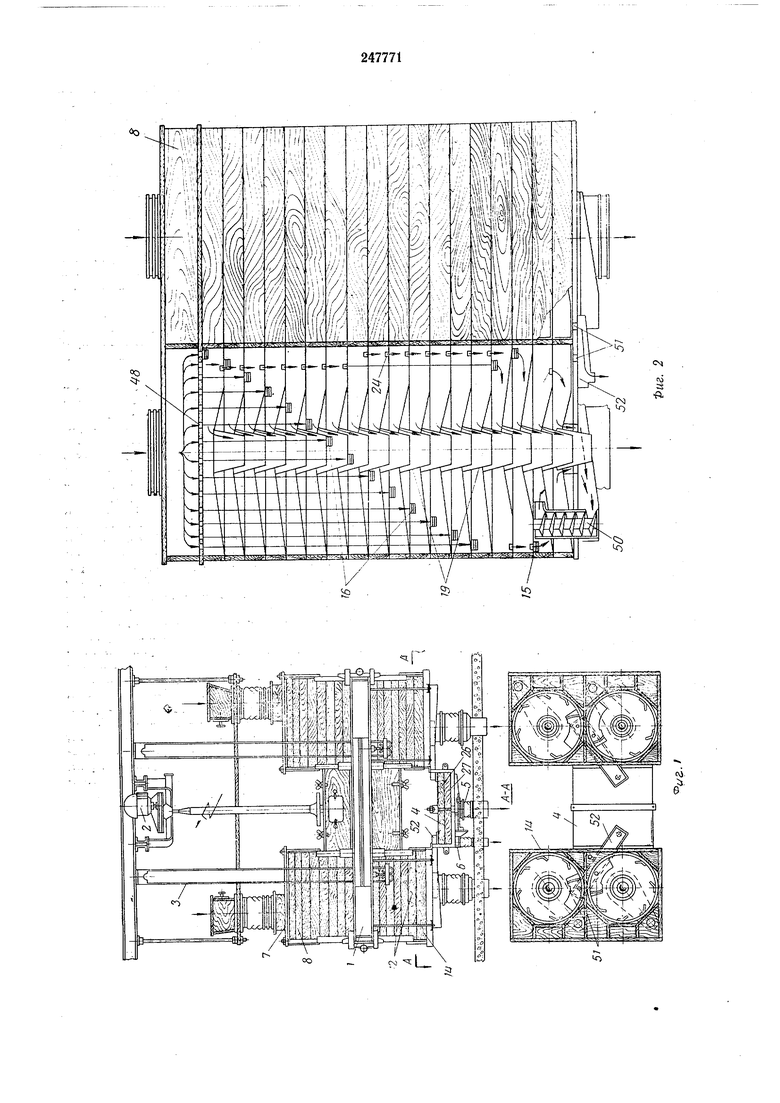
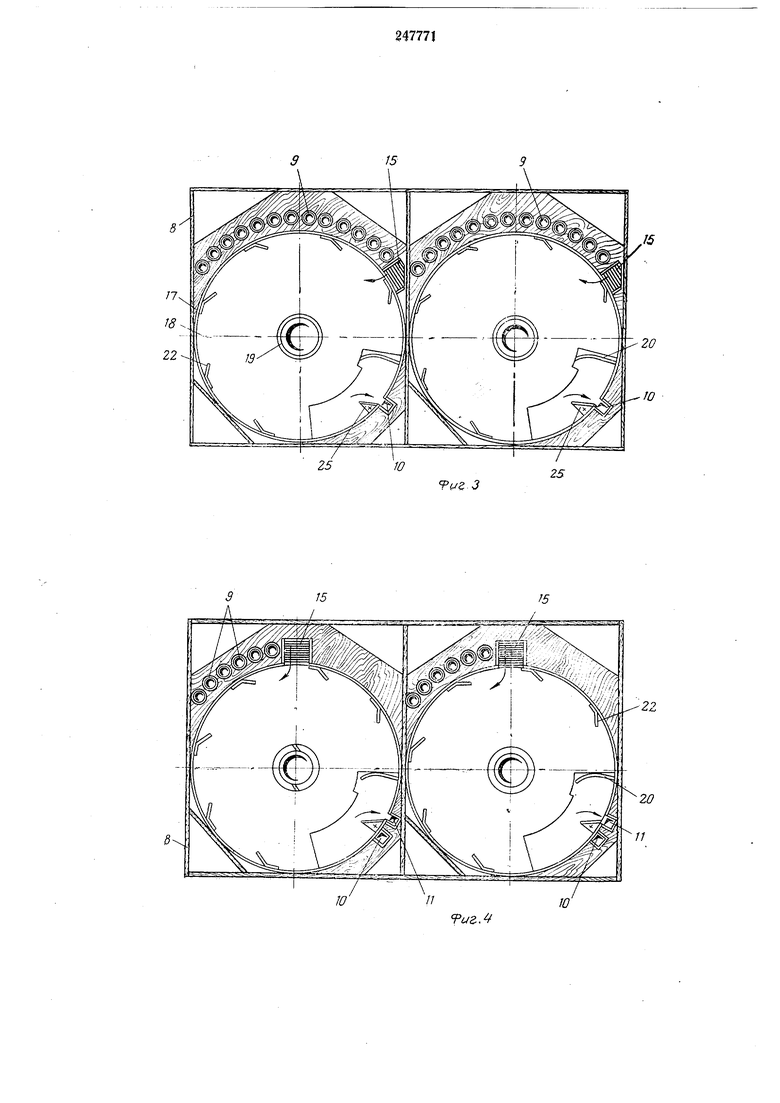
На фиг. 1 схематично изображена предлагаемая мащина в двух проекциях; на фиг. 2- один из кузовов мащины; на фиг. 3 - рабочая рама (с 1 по 7), вид сверху; на фиг. 4 - рабочая рама (с 8 по 14), вид сверху; на фиг.
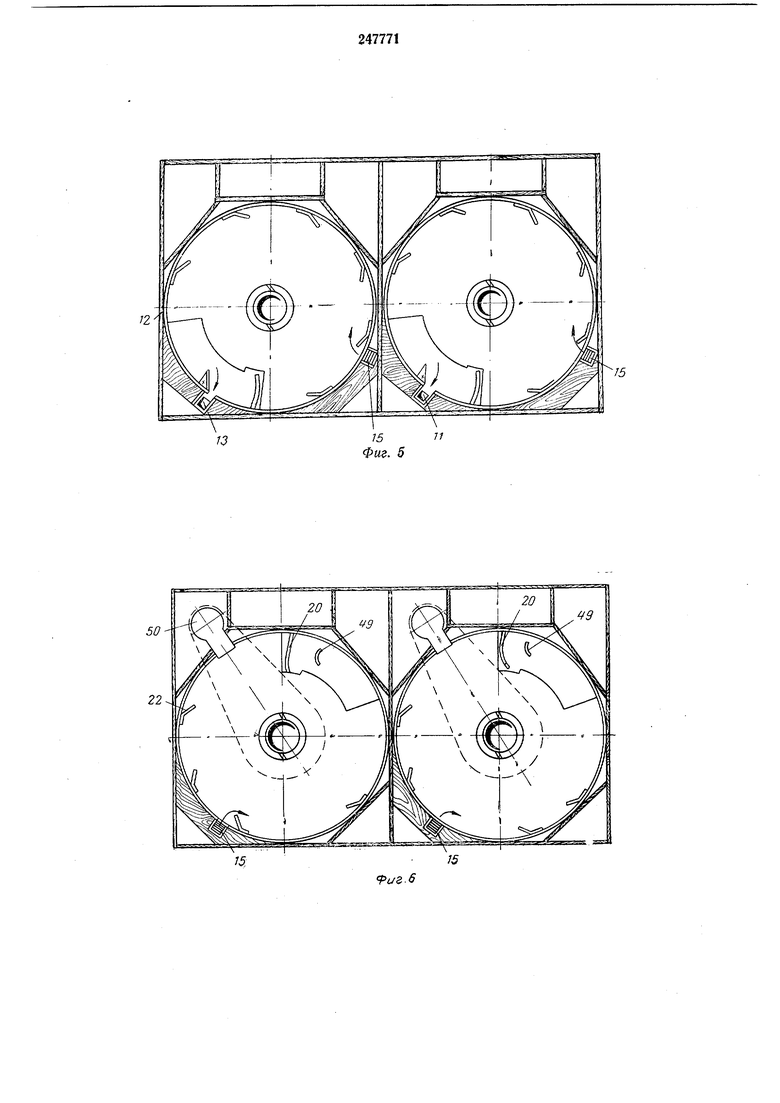
5- контрольная рама, вид сверху; на фиг.
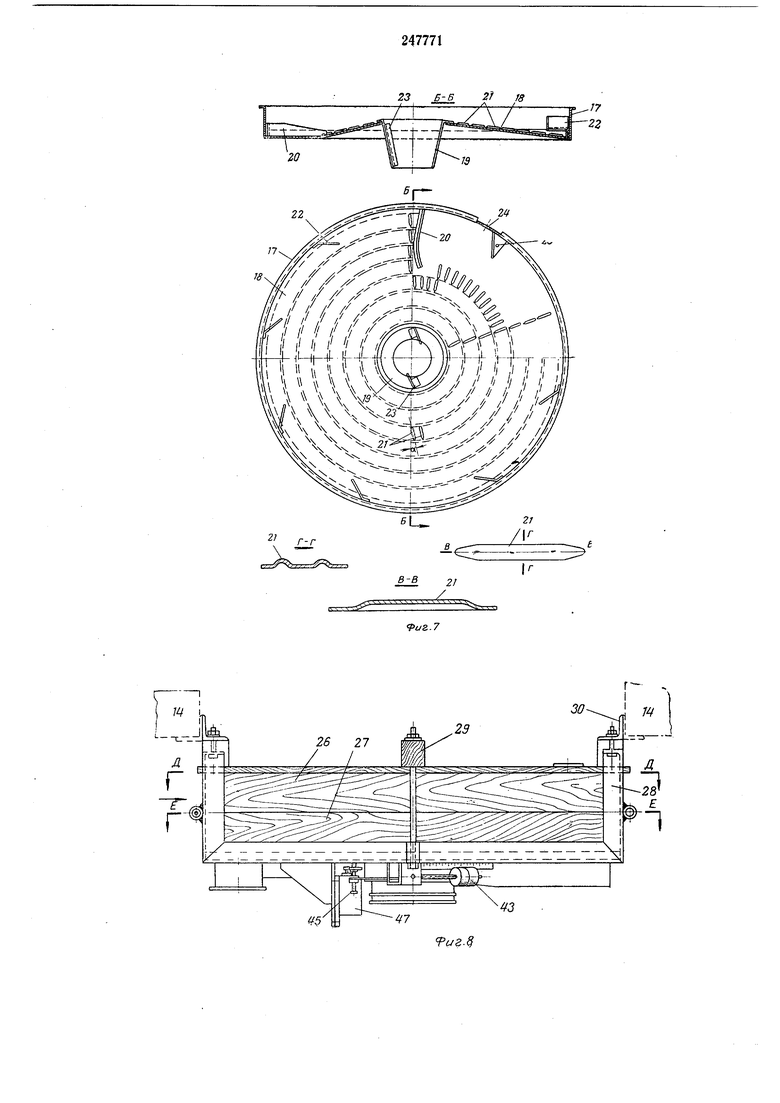
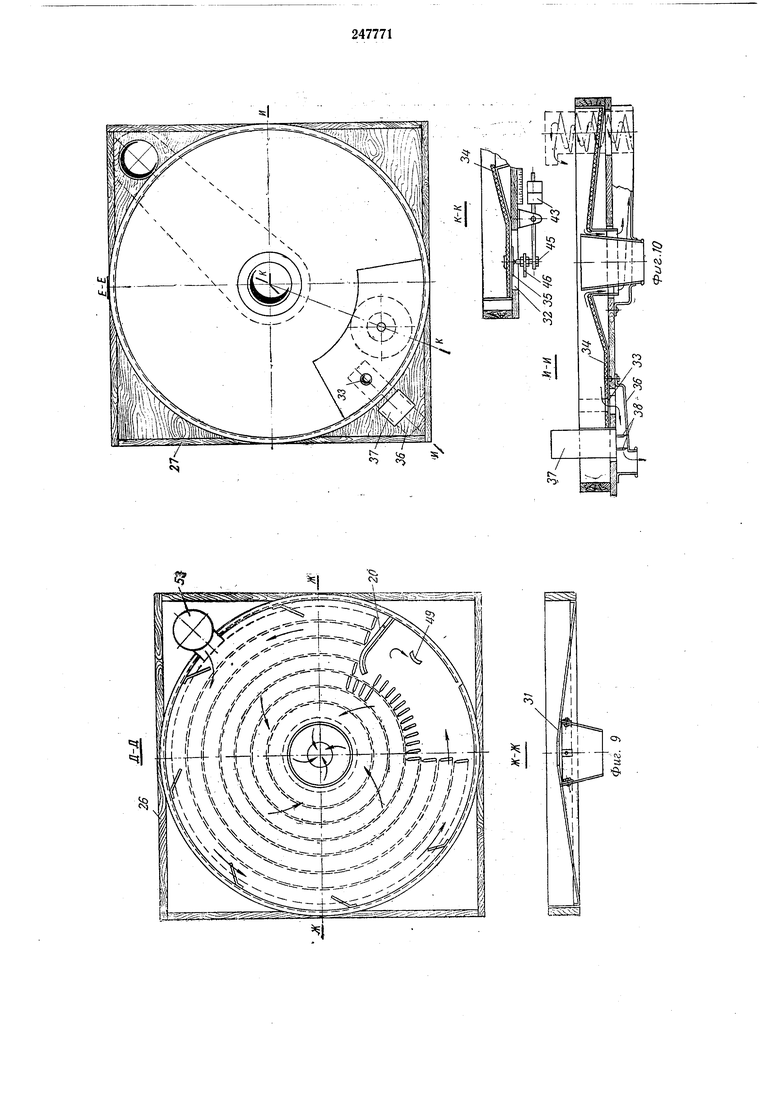
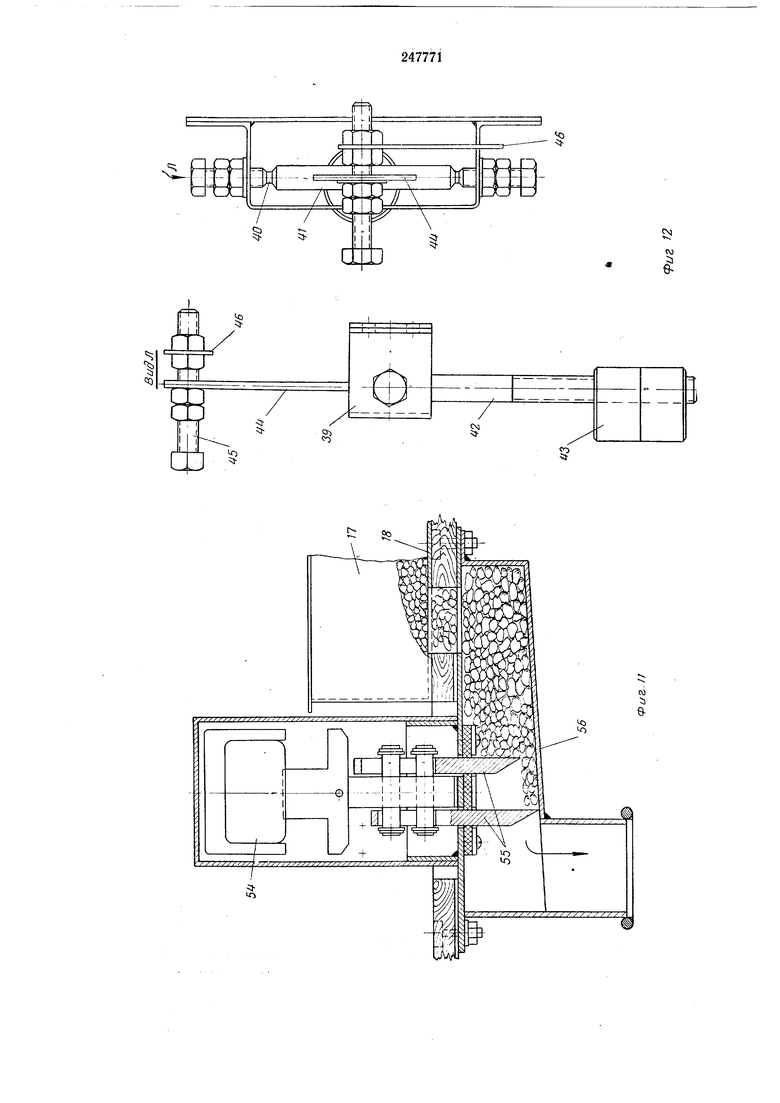
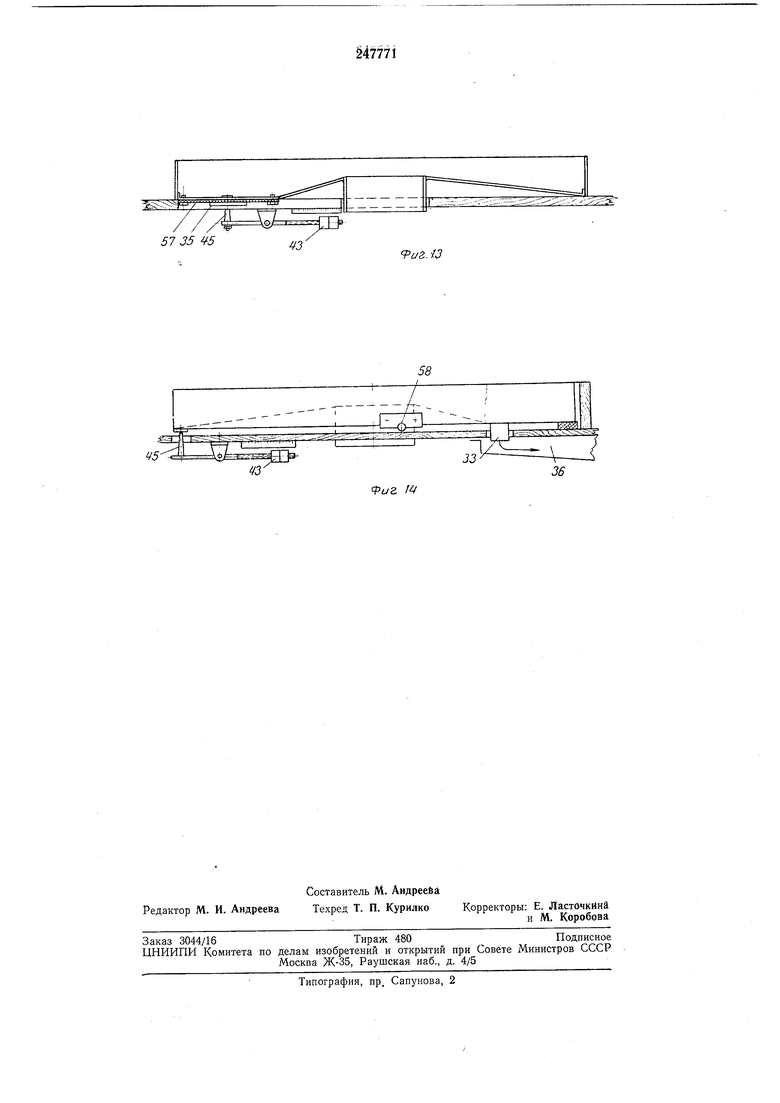
6-- сборная рама, вид сверху; на фиг. 7 - рабочая поверхность одной из рабочих рам; на фиг. 8 - устройство для автоматического контроля, вид сбоку; на фиг. 9 - разрез по Д-Д фиг. 8 с разрезом по Ж-Ж, на фиг. 10 - разрез по Е-Е фиг. 8 с двумя разрезами по К-К. и И-И; на фиг. 11 - выпускной патрубок с ножом-отсекателем; на фиг. 12 - датчик устройства для автоматического контроля; на фиг. 13 - нияшяя рамка устройства для автоматического контроля с вмонтированной в ее днище эластичной мембраной, служащей воспринимающим элементом датчика; на фиг. 14 - то же, что на фиг. 13, но воспринимающим элементом является сама рамка.
Машина состоит из двух кузовов, подвешенных .к металлической раме I, приводимой в круговое поступательное движение от электродвигателя 2 и подвешенной к потолочно-му перекрытию здания на тросах 5, расположенного между кузовами устройства автоматического контроля процесса очистки, смонтированного в кузове 4, имеющего патрубок 5 для очищенного зерна -и патрубок 6 для отходов (см. фиг. 1).
Каждый кузов содержит приемную коробку 7, несколько, например четырнадцать, рабочих рам 8 с вертикальными каналами 9, 10 и 11, несколько (например, три) контрольных рам 12 с каналами 13 и одну сборную раму 14. Каждый вертикальный канал рабочих и контрольных рам заканчивается дном 15, напротив которого расположено входное отверстие 16.
Рабочие и контрольные рамы (см. фиг. 3-6) выполнены с рабочими поверхностями, представляющими собой цилиндрические сосуды с бортами 17 и выпуклыми днищами 18, снабженные сборными воронками 19 конусообразной формы для выхода зерна, козырьками 20 и гофрами 21, расположенными под углом а к радиусу днища и служащими для перемешивания нижнего слоя зерна и неремещения его от центра к периферии.
На бортах 17 под углом к касательной установлены пластины 22, ускоряющие движение зерна, а в воронках 19 - сбрасыватели 23 для зерна. Входные отверстия 16 выполнены в бортах. В бортах же имеются отверстия 24 для -выхода примесей и соответствующие им направляющие 25.
ных крышкой и днищем, скрепленных между собой скобами 28 и бруском 29. Крепится устройство к днищу кузова угольниками 30. Рабочая поверхность рамок устройства аналогична рабочей поверхности рам 12 с той лишь разницей, что в воронке рабочей поверхности рамки 26 установлена приставка 31, удлиняющая путь прохоледеиия зерна по наклонной поверхности. Кроме того, рабочая поверхность
рамки 27 выполнена без ускорителей и козырька, но в ней имеется отверстие 32 для размещения датчика и отверстие 33 для выхода минеральной примеси, резиновый «оврик 34 с укрепленной под ним шайбой 35, лоток 36
для отвода минеральной примеси и расположеиный над этим лотком электросоленоид 37 с отсекателем 38 для минеральных примесей. Датчик (см. фиг. 10-12) состоит из основания 39, установленной на шариках 40 оси
41, укрепленного на этой оси рычага 42 с нротивовесом 43, планки 44 с размещенным на ней регулировочным онорным стержнем 45, контактирующим при нагрузке с шайбой 35, укрепленной на этом стержне планки 46, взаимодействующей при заданной концентрации минеральных нримесей с конечным выключателем 47.
Машина работает следующим образом. Зерно, попадая в ириемиую .коробку 7, проходит через калибрующие отверстия 48 и поступает по вертикальным параллельным каналам 9 на рабочие поверхности рам через входные Отверстия 16 в бортах. В результате кругового движения кузовов поступившее на раму зерно перемещается к центру и попадает в конусные воронки 19, по которым выводится из машины.
Мииеральные примеси, перемещаясь к борту рамы, отталкиваются о наклонно расположенные гофры 21 и двигаются вдоль борта к горизонтальной площадке, где их движение замедляется н они задерживаются козырьком 20. Затем примеси с помощью направляющей 25 .выходят в .каналы 10 и 11, по которым направляются на две контрольные рамы 12. По каналам 10 примеси попадают на первую кон трольную раму 12 с первых семи рабочих рам, а по каналам 11 - на вторую контрольную раму с последующих семи рабочих рам.
С контрольных рам (первой и второй) очищенное зерно выходит через воронки 19, а примеси попадают на третью контрольную раму (предпоследнюю в кузовах снизу). На последней (см. фиг. 6) рабочая поверхность по
сравнению с рабочей поверхностью двух Других контрольных рам повернута на 180°, а выпускное отверстие 49 имеет серпообразную форму и выполнено не в борту, а в горизонтальной площадке. Через это отверстие примесь попадает на самую нижнюю раму 14 (сборную), откуда очищенное зерно выходит через центральное отверстие в днище (см. фиг. 2), попадает в шнек 50 и возвращается им на вторую снизу раму 12 для повторпого отверстия 51 в перепускные коробки 52, по которым направляются на рабочую поверхность рамки 26 устройства для автоматического контроля процесса очистки. Очищенное зерно удаляется из устройства по воронке, а примеси скатываются к борту и через отверстие 49 поступают на рамку 27. По последней отделившееся от примеси зерно выходит через воронку, попадает к шнеку 53 и поднимается им на рамку 26 для повторной очистки. Оставшиеся примеси накапливаются на рабочей поверхности, покрытой резиновым ковриком 34. Как только концентрация скопившейся на площадке примеси достигает заданной величины (см. фиг. 10), под действием давления через коврик на шайбу приходит в движение регулировочный стержень 45, несущий опорную планку 46. Планка при этом воздействует на конечный выключатель 47, включается промежуточное реле, реле времени и электросоленоид 54. Последний поднимает нож-отсечку 55, ,и примесь по лотку 56 удаляется из машины. Спустя заданное время, нож падает и перекрывает выход примеси. В устройстве (на случай проверки) предусмотрено ручное включение электросоленоида. . Содержание зерна в примеси, выходящей из машины, не превышает 2%. Воспринимающим элементом датчика может быть не только размещенный над выпускным отверстием рамки 27 участок эластичного покрытия, но и эластичная мембрана 57 с шайбой 35 (см. фиг. 13) или же сама рабочая поверхность этой рамы, закрепленная в этом случае на эксцентрично установленных шарнирах 58 (см. фиг. 14) и удерживаемая в горизонтальном положении рычагом с помощью противовеса 43. Предмет изобретения 1. Машина для отделения тяжелых примесей от зерна и тому подобных продуктов, содержащая сообщающий ей круговое поступательное движение привод, загрузочное устройство, кузова, состоящие из поярусно расположенных и выполненных с каналами для параллельного подвода подлежащего очистке продукта рам, в «аждую из которых вмонтирована рабочая поверхность конусообразной формы, имеющая у основания цилиндрический Ьорт с входным отверстием для продукта, горизонтальную площадку с козырьком и выходным отверстием для примесей, и центрально установленный воронкообразный патрубок для отвода очищенного зерна; и сборник примесей, состоящий из нижних рам кузовов и имеющий выходное отверстие с перекрывающей его заслонкой, отличающаяся тем, что, с целью повышения эффективности очистки и обеспече ЛИЯ автоматического выпуска примесей по мере их накопления, сборник примесей снабжен сообщенным с ним перепускными коробками устройством для автоматического контроля процесса очистки, причем заслонка выпускного отверстия выполнена с соленоидным приводом, управляемым этим устройством. 2.Машина по п. 1, отличающаяся тем, что устройство для автоматического контроля процесса очистки состоит из кузова, смонтированного в нижней части ее и содержащего две рамы с конусообразной рабочей поверхностью, и имеющего рычаг датчика веса для управления соленоидньш приводом заслонки выпускного отверстия, причем последнее выполнено в рабочей поверхности нижней рамы устройства. 3.Машина по пп. 1, 2, отличающаяся тем, что воспринимающий элемент датчика представляет собой перекрывающую отверстие в рабочей поверхности нижней рамы устройства мембрану с шайбой, установленной под ней и служащей для воздействия на рычаг датчика. 4.Машина по пп. 1, 2, отличающаяся тем, что воспринимающим элементом датчика является сама рабочая поверхность нижней рамы устройства, закрепленная на эксцентрично установленных шарнирах и удерживаемая в горизонтальном положении рычагом датчика. 5.Машина по пп. 1, 2, отличающаяся тем, что для более быстрого отделения зерна от примесей, у борта рабочей поверхности каждой рамы на высоте от днища, равной не более 10 мм, установлены под углом планки. 6.Машина по пп. 1, 2, отличающаяся тем, что в воронкообразных патрубках рам установлено по паре пластин-сбрасывателей. 7.Машина по пп. 1, 2, отличающаяся тем, что, с целью более быстрого удаления отделенных примесей с рабочих поверхностей рам, на горизонтальных площадках последних смонтированы под углом направляющие гонки.
CM
;) a ft
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для отделения тяжелых примесей от зерна и тому подобных продуктов | 1940 |
|
SU68464A1 |
| МАШИНА ДЛЯ ОТДЕЛЕНИЯ ВРЕДНЫХ ПРИМЕСЕЙ ОТ СЕМЯН ЗЕРНОВЫХ КУЛЬТУР | 2023 |
|
RU2807284C1 |
| СПОСОБ ПРИЕМКИ, ОЧИСТКИ ЗЕРНОВОГО ВОРОХА С ПОЛЯ, СКЛАДИРОВАНИЯ ЗЕРНА И КОМПЛЕКС ОЧИСТКИ И СКЛАДИРОВАНИЯ | 2012 |
|
RU2500489C2 |
| САМОРАЗГРУЖАЮЩЕЕСЯ САМОХОДНОЕ ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЕ СРЕДСТВО НА ГУСЕНИЧНОМ ХОДУ | 2007 |
|
RU2335881C1 |
| МАШИНА ДЛЯ ОТДЕЛЕНИЯ ЯДОВИТЫХ СКЛЕРОЦИЙ РАЗНОВИДНОСТЕЙ ГРИБА CLAVICEPS ОТ СЕМЯН ЗЕРНОВЫХ ЗЛАКОВЫХ РАСТЕНИЙ | 2023 |
|
RU2803317C1 |
| Способ предпосевной обработки семян и устройство для осуществления | 2020 |
|
RU2765628C2 |
| Вибрационный питатель | 1990 |
|
SU1720944A1 |
| УСТАНОВКА САМОСВАЛЬНАЯ ДЛЯ ПЕРЕВОЗКИ ГРАНУЛИРОВАННОГО МАТЕРИАЛА (ВАРИАНТЫ) | 2018 |
|
RU2685488C1 |
| Пневмоустановка для очистки, сепарации зерна и выполнения погрузочно-разгрузочных работ | 2024 |
|
RU2840154C1 |
| СИСТЕМА ПРЕОДОЛЕНИЯ АВТОМОБИЛЕМ СКОЛЬЗКОГО ДОРОЖНОГО ПОКРЫТИЯ | 2015 |
|
RU2626420C2 |
. „ |)
Hfr-ii te i
H- -I ™ №
- teLJiiJiii ;,
0
J
.
J
J
o
yi-.
. cu 3
11
«.
т
00
23 57 35 V5 иг. /J
