Известные силоизмерители, например, к разрывной испытательной машине, содержащие преобразователь измеряемого усилия в угловое перемеш,ение, вспомогательный привод, промежуточный механизм и механические регистраторы, не позволяют повысить точность регистрации измеряемого усилия.
Предлагаемый силоизмеритель отличается от известных тем, что в нем промежуточный механизм, установленный между преобразователем измеряемого усилия в угловое перемеш,ение и регистраторами, выполнен в виде соосно расположенных поводков и храпового колеса, жестко закрепленного на оси привода регистраторов, вокруг которой свободно враш,ается средний поводок с собачкой храпового механизма и штифтами, кинематически связывающими этот поводок с крайними поводками, один из которых жестко укреплен на выходном валу преобразователя измеряемого усилия в угловое перемещение, а второй крайний поводок соединен с выходным валом вспомогательного привода, совершающим реверсивное движение на определенный угол.
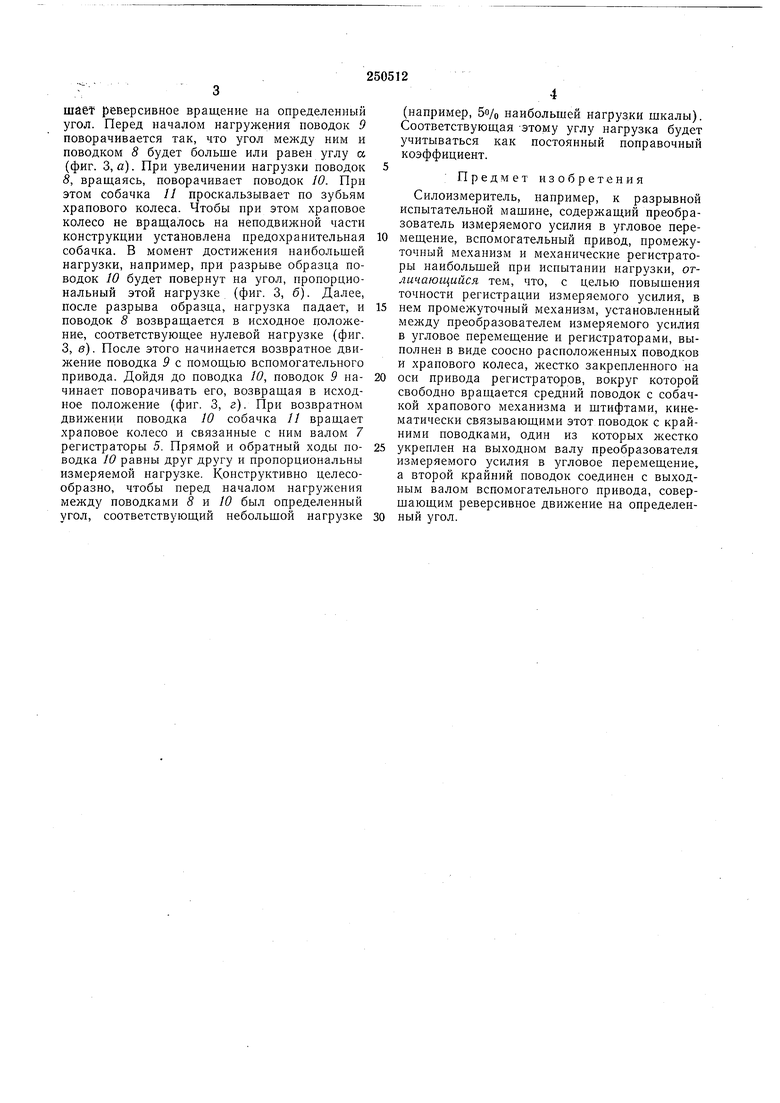
механизма в различные моменты цикла испытания: а - перед началом растяжения; б - в момент разрыва; в - после разрыва; г - после регистрации нагрузки.
Силоизмеритель содержит преобразователь 1 измеряемого усилия в угловое перемещение вала 2, вспомогательный привод 3, промежуточный механизм 4, механические регистраторы 5 и валы () и 7, соединяющие промежуточный механизм соответственно с вспомогательным приводом -и регистраторами. Промежуточный механизм содержит поводок 8, жестко закрепленный на валу 2, поводок 9, кинематически соединенный с вспомогательным приводом, поводок 10, на котором установлена собачка //, и храповое колесо /2, жестко закрепленное на валу 7. Поводки S, 9, 10, храповое колесо 12 и валы 2 и 7 соосны. Наибольшей измеряемой нагрузке соответствует поворот вала 2 на угол а, меньший 360°.
Вспомогательный привод содерл ит электродвигатель и кулачковый механизм, преобразуюший одностороннее вращение электродвигателя в реверсивное движение вала- 6 на определенный угол.
шабТ реверсивное вращение на определенный угол. Перед началом нагружения поводок 9 поворачивается так, что угол между ним и поводком 8 будет больше или равен углу а (фиг. 3, а). При увеличении нагрузки поводок 8, вращаясь, поворачивает поводок 10. При этом собачка 11 проскальзывает по зубьям храпового колеса. Чтобы при этом храповое колесо не вращалось на неподвижной части конструкции установлена предохранительная собачка. В момент достижения наибольшей нагрузки, например, при разрыве образца поводок 10 будет повернут на угол, пропорциональный этой нагрузке (фиг. 3, б). Далее, после разрыва образца, нагрузка падает, и поводок 8 возвращается в исходное цолол ение, соответствующее нулевой нагрузке (фиг. 3, в). После этого начинается возвратное движение поводка 9 с помощью вспомогательного привода. Дойдя до поводка 10, поводок 9 начинает поворачивать его, возвращая в исходное положение (фиг. 3, г). При возвратном движении поводка 10 собачка // вращает храповое колесо и связанные с ним валом 7 регистраторы 5. Прямой и обратный ходы поводка 10 равны друг другу и пропорциональны измеряемой нагрузке. Конструктивно целесообразно, чтобы перед началом нагружения между поводками 8 я 10 был определенный угол, соответствующий небольшой нагрузке
(например, 5о/о наибольшей нагрузки щкалы). Соответствующая -этому углу нагрузка будет учитываться как постоянный поправочный коэффициент.
Предмет изобретения
Силоизмеритель, например, к разрывной испытательной мащине, содержащий преобразователь измеряемого усилия в угловое перемещение, вспомогательный привод, промежуточный механизм и механические регистраторы наибольшей при испытании нагрузки, отличающийся тем, что, с целью повышения точности регистрации измеряемого усилия, в
нем промежуточный механизм, установленный между преобразователем измеряемого усилия в угловое перемещение и регистраторами, выполнен в виде соосно расположенных поводков и храпового колеса, жестко закрепленного на
оси привода регистраторов, вокруг которой свободно вращается средний поводок с собачкой храпового механизма и щтифтами, кинематически связывающими этот поводок с крайними поводками, один из которых жестко
укреплен на выходном валу преобразователя измеряемого усилия в угловое перемещение, а второй крайний поводок соединен с выходным валом вспомогательного привода, совершающим реверсивное движение на определенный угол.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного измерения и регистрации направления и скорости ветра | 1955 |
|
SU107017A1 |
| Устройство для дистанционного измерения и регистрации средней скорости и направления ветра | 1959 |
|
SU129043A1 |
| Устройство для измерения толщины черенков | 1980 |
|
SU940695A1 |
| Гайковерт ударно-вращательногодЕйСТВия | 1979 |
|
SU848337A1 |
| Привод вторичных электрочасов башенного типа (его варианты) | 1979 |
|
SU980061A1 |
| Самопишущее устройство | 1960 |
|
SU132828A1 |
| СЧЕТЧИК РЕСУРСА | 1995 |
|
RU2123169C1 |
| ВЕЛОСИПЕД И РЫЧАЖНО-ХРАПОВОЙ МЕХАНИЗМ | 1999 |
|
RU2155141C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕВЕРСИВНЫЙ НРИВОДПЕРЕКЛЮЧАТЕЛЯ | 1971 |
|
SU419994A1 |
| Механизм привода реверсивных транспортеров | 1973 |
|
SU464491A1 |

.ы-г
Фиг. 2
