Ё настояШ,ее время на алюминиевых заводах, оборудованных электролизерами с верхним подводом тока, анодные штыри извлекают и переставляют при помощи мостового крана, снабженного кареткой, вертикальной штангой и кабиной, в которой установлены механизмы для враш.ения (разворота) и подъема штыря. Крутяш,ий момент передается штанге с помош,ью квадратного гнезда, вращаемого приводом. Крутящий момент и осевая сила при извлечении штыря прикладываются одновременно.
Предложенное устройство, смонтированное на мостовом кране, отличается от известного тем, что механизм для подъема штыря выполнен в виде системы рычагов, шарнирно соединенных с кареткой и приводимых в движение в горизонтальной и вертикальной плоскостях гидроцилиндрами, а механизм для вращения соединен захватом непосредственно с головкой штыря и кинематически связан с механизмом для контактирования зажимов со штырем.
Кроме того, электродвигатель механизма для вращения штыря расположен соосно с планетарным редуктором, выходной вал которого имеет захват для соединения со штырем.
Механизм для контактирования зажимов со штырем снабжен телескопическим валом, конической парой шестерен и механическим ключом, перемещаемым в горизонтальной плоскости гидроцилиндром.
При такой .конструкции устройства повышается надежность и срок его службы, а также уменьшаются вес и габаритные мостового крана по высоте.
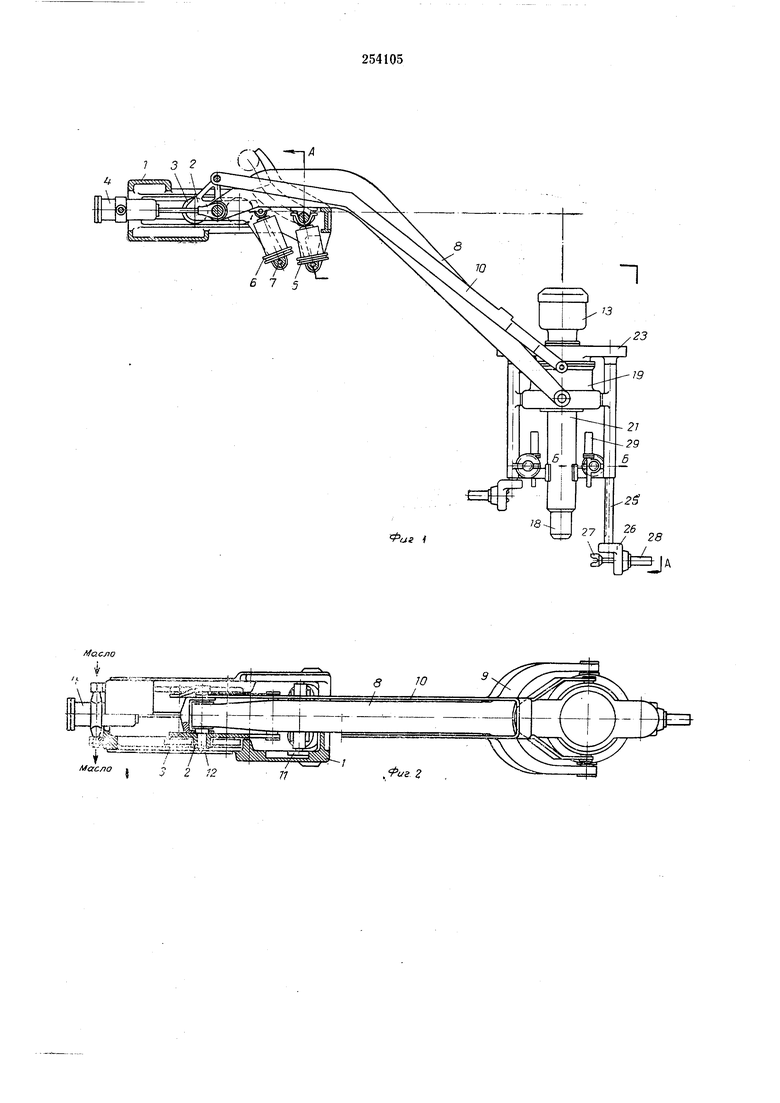
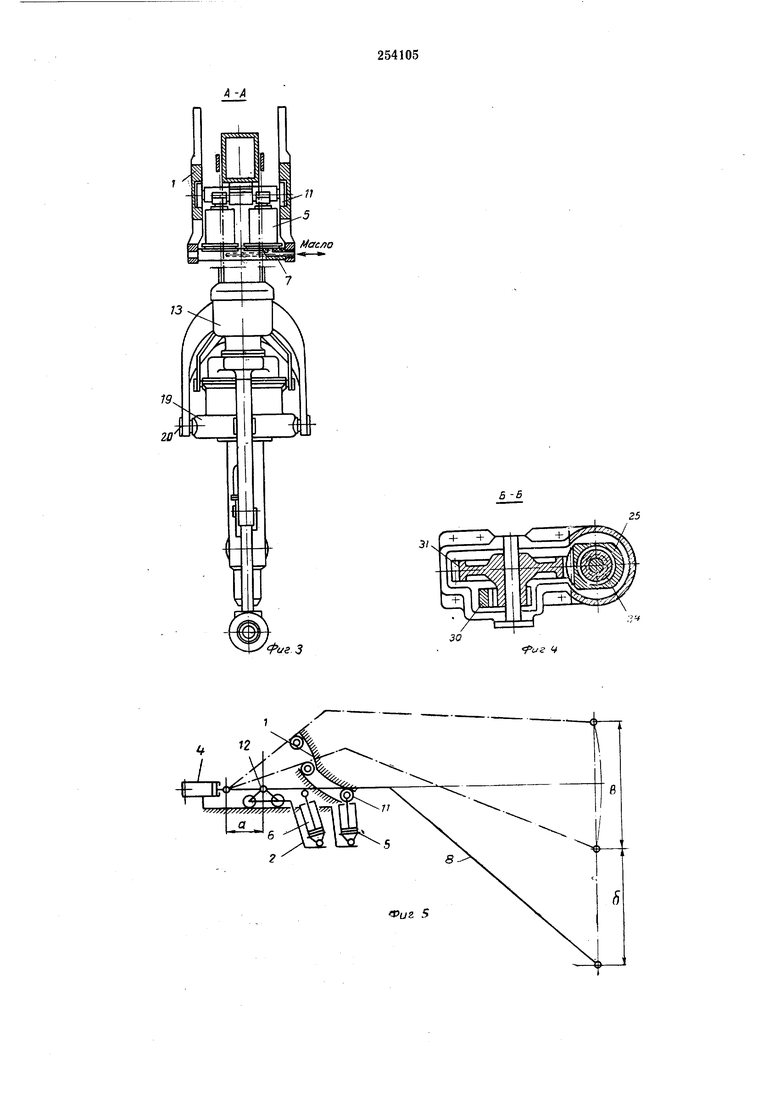
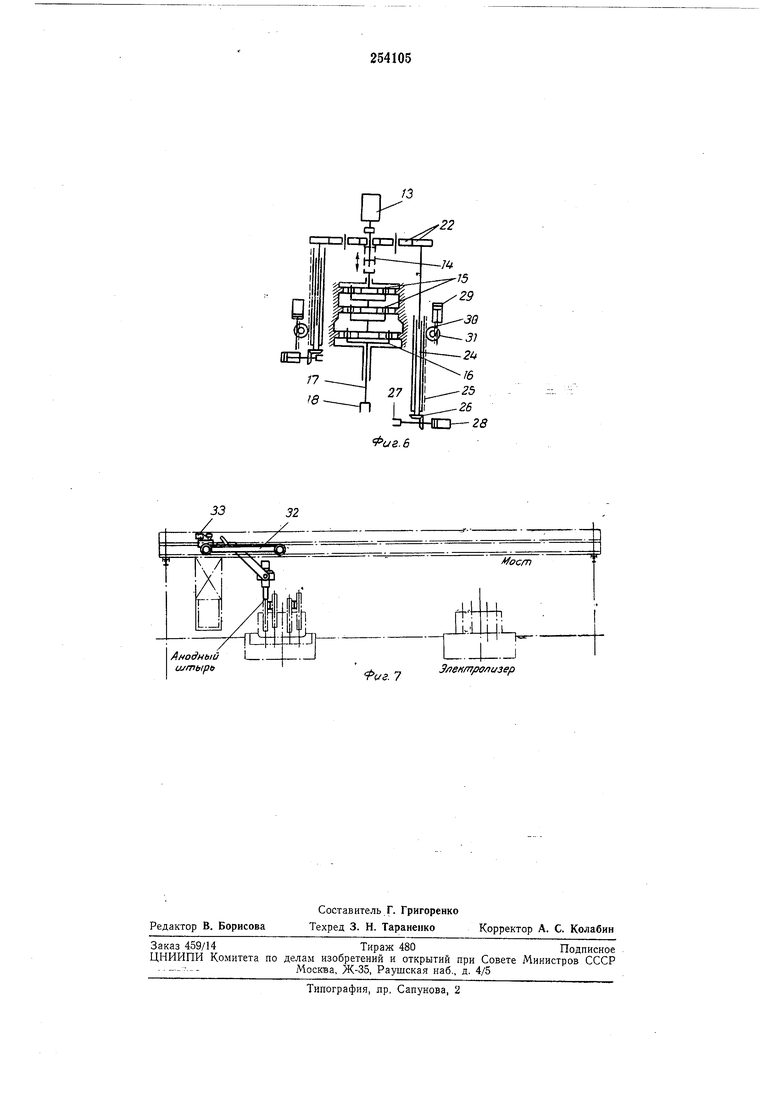
На фиг. 1 изображен рычажный механизм для подъема штыря в сборе с механизмолЕ для его вращения и механизмом для контактирования зажимов со штырем; на фиг. 2 - то же, вид в плане; на фиг. 3 - разрез по А-Л на фиг. 1; на фиг. 4 - разрез по Б-Б на фиг. 1; на фиг. 5 - кинематическая схема рычажного механизма для подъема штыря; на фиг. 6 - кинематическая схема планетарного трехступенчатого редуктора механизма для вращения штыря .и механизма для контактирования зажимов со штырем; на фиг. 7- схема установки устройства на мостовом кране.
Устройство для извлечения и перестановки анодных штырей алюминиевого электролизера с верхним ПОДВОДОМ тока состоит из следующих основных узлов: рычажного механизма для подъема штыря, механизма вращения (разворота) штыря и механизма для контактирования зажимов со штырем.
Рычажный механизм для подъема штыря состоит из станины /, каретки 2, роликов 3,
гидроцилиндров 4 для горизонтального перемещения рычага, силовых гидроцилиндров 5 для вертикального подъема, гидроцилиндра 6 подъема, трубчатых осей 7, основного рычага S с вилкой Я всиомогательных рычагов Ю с вилками, ролика II и оси 12 рычага.
Мехаиизм вращения содержит электродвигатель 13, кулачковую муфту 14, планетарный редуктор, состоящий из трехступенчатой передачи 15, ВЫХОДНОГО водила 16, штыревой штанги 17, захвата 18 штыря, корпуса 19 редуктора с цапфйми 20, чехла 21 штыревой штанги.
Механизм для контактирования состоит из зубчатой передачи, 22, чехла 23 передачи, телескопического вала 24, трубчатой рейки 25, конической зубчатой иары 26, механического ключа 27, гидроцилиндра 28 горизонтальной подачи, гидроцилиндра 29 вертикального перемещения рейки W и ускорительной зубчатой передачи 3/.
Рычажный механизм накладывает вертикальную осевую силу иа анодный штырь, нодлежащий извлечению из угольного тела анода электролизера.
Штырь после отрыва от угля поднимается на нужную высоту для (переноса нижнего его конца «ад электролизером.
Необходимое вертикальное усилие на конце рычага 8 развивается с помощью системы гидравлических цилиндров, установленных у шарнирного крепления рычага. В качестве базы, воспринимающей реактивные силы, возникающие при перемещении рычага 8 гидроцилиндрами, используется станина / и каретка 2.
При извлечении штыря конец рычага должен иеремещаться вертикально вверх, чтобы штырь не касался контактных поверхностей анодной ошиновки.
Для обеспечения движения конца рычага по прямой (в начале хода -вверх) примеиена кинематическая система, состоящая из гидроцилиндров 5, каретки 2, гидроцилиндра 4, криволинейной и прямолинейной направляющих в станине /. Перемещение «аретки 2 по горизонтальной натравляющей станины на величину а (см. фиг. 5), а роликов 11 - оо криволинейной на правляющей станины обеспечивает перемещение конца рычага 8 по вертикальной прямой на участке б. Для упрощения кинематики механизма конец рычага, пройдя участок б, движется по кривой. На участке в при этом центром дуги, описываемой концом рычага, является ось 12, которая в этот момент неподвижна относительно станины 1, т-ак как каретка 2 дошла до упора.
Цилиндры 5 являются силовыми, т. е. развивающими полную подъемную силу, необходимую для извлечения штыря. Величина хода цилиндров 5 определяется ходом конца рычага по прямому участку б, дальнейший подъем осуществляется цилиндром 6.
Рычаг перемешается цилиндром 4 по горизонтали одновременно с действием на него
цилиндров 5, что позволяет «обкатывать профильную часть станииы без больших механических иагрузок, так как вертикальные и горизонтальные составляющие сил, развиваемых гидроцилиндрами, создают уравновешенную систему сил.
В момент подъема рычага со штырем масло подается компрессором только в цилиндры 4 и 5. Цилиндр 6 засасывает масло из масляного бака. Цилиндры 5 имеют ограниченный ход и иосле подъема рычага на высоту б отсоединяются от опорной оси рычага, и дальнейшее его движение производится только с помощью цилиндра 6, в который в момент отключения цилиндров 5 начинает подаваться масло под давлением.
При опускании рычага сначала масло выпускается из цилиндров 5, а затем из цилиндра 6; в цилиндр 4 масло подается под незначительным давлением в заднюю полость. Скорость подъема рычага определяется производительностью масляного компрессора и регулирующих устройств, а скорость опускания - скоростью выпуска масла из цилиндров, при этом свободное падение механизма вращения и его щтанги с захватом на головку штыря исключается, так как истечение масла происходит под действием подвижных частей механизма, поэтому в момент его опирания на штырь истечение масла прекращается.
Рычаг 10 является вспомогательным и предназначен для удержания механизма вращения в вертикальном положении во время работы механизма.
Вилка 9 воспринимает и передает на рычаг реактивный крутящий момент во время разворота анодного штыря. Горизонтальная сила, возникающая на шарнирном конце рычага, воспринимается осью 12 п внутренними выступами станины /. Ось 12 упирается в стальные каленые накладки, закрывающие горизонтальные проемы в станине 1.
При извлечении анодных штырей требуется приложить к ним крутящий момент большой величины. В механизме вращения с помощью планетарного трехступенчатого редуктора крутящий момент, развиваемый электродвигателем 13, преобразуется в момент нужной величины.
Перед извлечением щтыря механизм вращения с номощью захвата 18 соединяется с его головкой, кулачковая муфта 14 соединяет вал электродвигателя с валом редуктора (муфта приводится в действие электромагнитом). После включения электродвигателя крутящий момент передается штырю. Реактивный момент, образующийся на корпусе редуктора, передается его цапфами на вилки рычага вертикального подъема.
Данный механизм вращения штыря без каких-либо изменений может быть использован в сочетании с другим устройством вертикального подъема, например в сочетании с телескопической штангой.
Перед началом извлечения из анода штырь должен быть освобожден от прижимных (контактных) устройств.
Механизм контактирования (см. фиг. 6) предназначен для приведения в действие конта ктных устройств, имеющих горизонтальный прижимной болт, с которым может соединяться ключ 27.
Механизм работает следующим образом.
После установки захвата 18 на головку анодного щтыря с помощью цилиндра 29 и зубчатой передачи 31 ключ 27 устанавливается (опускается) соосно с прижимным болтом контактного устройства электролизера. Цилиндром 28 ключ перемещается в сторону контакта и надевается на головку болта. Муфта отключает электродвигатель 13 от вала планетарного редуктора. После этого электродвигатель включается и с помощью передачи 22, телескопического вала 24, конической пары 26 начинает вращать в нужную сторону ключ 27, соединенный с контактным болтом зажима.
После освобождения зажима цилиндром 28 ключ снимается с головки болта и включается с помощью муфты 14 механизм вращения щтыря. В момент установки очищенного анодного штыря в анод электролизера положение ключа по высоте соответственно корректируется.
После установки ключа против контактного болта вся система механизма контактирования снова приводится в действие, затягивает контакт и закрепляет щтырь.
На чертеже показано два механизма контактирования. Это вызвано необходимостью обслуживания контактов наружных и внутренних рядов штырей.
Механизм контактирования может быть применен и для обслуживания контактных устройств с вертикальными валами, например эксцентриковых зажимов. В этом случае он может отличаться от предлагаемого отсутствием конической пары 26 и вертикальным расположением ключа 27, соединенного непосредственно с валом 24.
Для наводки штанги механизма на анодный щтырь, подлежащий извлечению, необходимо иметь возможность перемещать его в поперечном и продольном направлениях относительно продольной оси электролизера. Такие перемещения могут осуществляться мостовым электрическим краном, для чего предлагаемый механизм устанавливается на его тележке 32.
В случае при: генения устройства для извлечения штырей из анодов кольцеобразной
формы на кране должно быть установлено поворотное нриспособление, позволяющее радпально перемещать устройства при совмещенном центре поворотного приспособлен 1я с центром кольцевого анода. Устройство с поворотньпг приспособление: позволяет с одной установки моста крана извлекать любой из штырей, установленных в кольцевом аноде. На тележке крана устанавливается масляная система 33 (баки, насосы и т. д.) для питания гпдроцилиндров механизма подъема и гидроцилиндров управления л1еханизма контактирования.
На кране устанавливается кабина с пультом управления и кассетами для приема извлекаемых штырей и с запасом очищенных штырей, устанавливаемых в анод на место извлеченных.
П р е д м е г и зоб р е т е н п я
1. Устройство для 1звлечения и перестановки анодных штырей алюминиевого электролизера с верхним подводом тока, включающее перемещающуюся каретку и механизмы для вращения и подъема штыря, отличающееся
тем, что, с целью повышения надежности и срока службы устройства, а также уменьщения веса и габаритных размеров мостового крана по высоте, механизм для подъема штыря выполнен в виде системы рычагов, шарнирно соединенных с кареткой и приводимых в движение в горизонтальной и вертикальной плоскостях ридроцилпндрами, а механизм для вращения соединен захватом непосредственно с головкой штыря и кинематически связан с
механизмом для контактироваиия зажимов со штырем.
2.Устройство но п. 1, отличающееся тем, что электродвигатель механизма для вращения штыря расположен соосно с нланетарным
редуктором, выходной вал которого снабжен захватом для соединения со штырем.
3.Устройство по п. 1, отличающееся тем, что механизм для контактирования зажпмов со штырем снабжен телескопическим валом,
конической парой щестерен и механическим ключом, перемещаемым в горизонтальной плоскости гидроцилиндром.
7 32 V Wv / rtK -eCI ч I
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ЗАТЯЖКИ и ОСВОБОЖДЕНИЯ | 1966 |
|
SU185080A1 |
| МАШИНА ДЛЯ ОБСЛУЖИВАНИЯ АЛЮМИНИЕВЫХ ЭЛЕКТРОЛИЗЕРОВ С ОБОЖЖЕННЫМИ АНОДАМИ | 1968 |
|
SU212545A1 |
| ПЕРЕДВИЖНАЯ МАШИНА ДЛЯ ОБСЛУЖИВАНИЯ ЭЛЕКТРОЛИЗЕРОВ ДЛЯ ПОЛУЧЕНИЯ АЛЮМИНИЯ | 1967 |
|
SU204595A1 |
| Устройство для затяжки и открывания контактных зажимов алюминиевых электролизеров | 1984 |
|
SU1188223A1 |
| МАШИНА ДЛЯ ОБСЛУЖИВАНИЯ АЛЮМИНИЕВЫХ ЭЛЕКТРОЛИЗЕРОВ | 1969 |
|
SU251833A1 |
| Устройство для затяжки и освобождения контактных зажимов анодных штырей алюминиевых электролизеров | 1978 |
|
SU771194A1 |
| МОСТОВОЙ КРАН | 1969 |
|
SU247482A1 |
| Устройство для затяжки и открытия контактных зажимов алюминиевых электролизеров | 1978 |
|
SU751841A1 |
| УСТРОЙСТВО для ЗАТЯЖКИ и ОСВОБОЖДЕНИЯ КОНТАКТНЫХ ЗАЖИМОВ | 1973 |
|
SU390186A1 |
| ПЕРЕДВИЖНАЯ МАШИНА ДЛЯ ОБСЛУЖИВАНИЯ ЭЛЕКТРОЛИЗЕРОВ ДЛЯ ПОЛУЧЕНИЯ АЛЮМИНИЯ | 1967 |
|
SU200769A1 |
Масло
.3
5 -В
fuS ч
Фиг 5
7
Анодный I
и/тырч
. 7
