Известны способы автоматического управления передвижной механизированной шахтной крепью, обеспечивающие контроль распора и перемещения стоек и секций крепи, минимального уровня верхняков, получение и обработку информации о взаимном положении выемочной мащины и секций крепи.
Предлагаемый способотличается тем, что порядок передвижения секций крепи изменяют в зависимости от скорости движения выемочной машины, на-пример с последовательного на шах.матный (с додвиганием непередвинутых секций) или с шахматного на последовательный, путем подачи сигналов датчика местонахождения выемочной машины в запоминающее устройство, а выдаваемые последним команды на передвижку очередной секции исполняют при одновременном распоре двух смежных секций крепи.
Это будет способствовать повышению производительности угледобывающего комплекса.
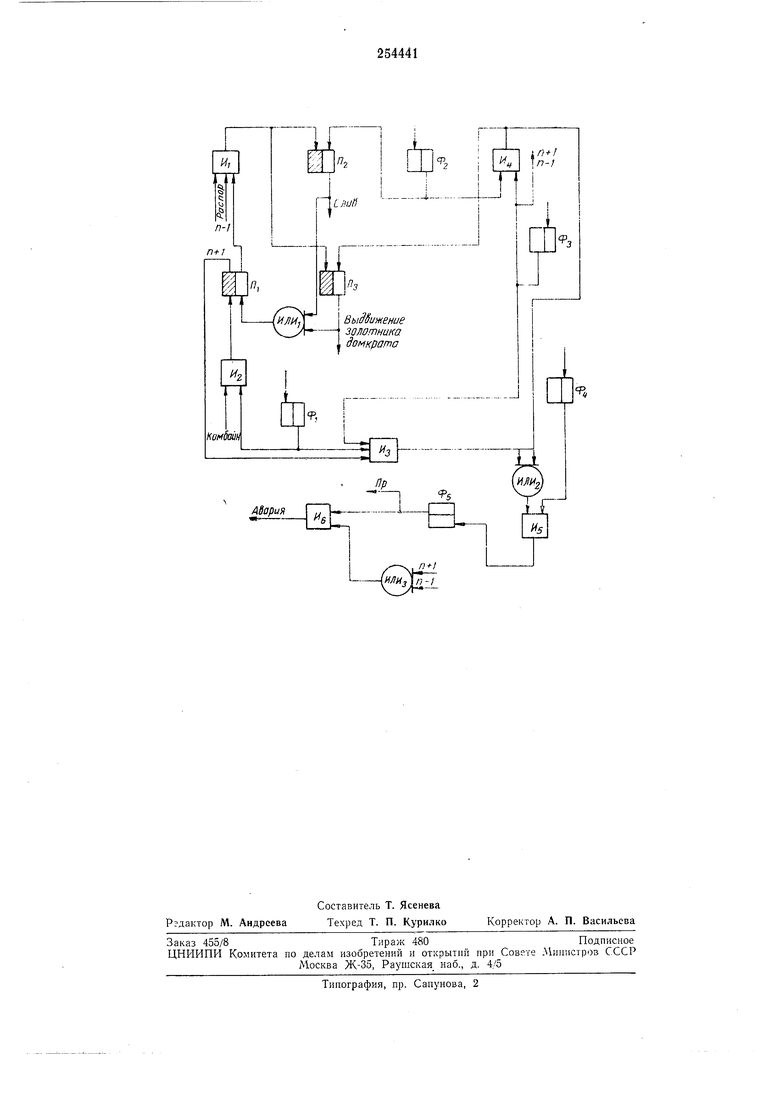
На чертеже .показана структурная схема устройства, реализующего предложенный способ автоматического управления крепью. Устройство содержит датчики контроля Фг и Фа соответственно заднего и переднего крайних положений секции крепи, датчик распора Фз секции крепи, датчик контроля Ф минимального (аварийного) уровня верхняка секции, элементы памяти - триггеры HI, IJz, Пз, логические элементы совладения сигналов от Я до Яв и элементы разделения сигналов ИЛИ, ИЛИ2, ЯЛЯз.
Сигналы датчика 0i поступают на входы
элементов Я2 и Из, сигналы датчика Фа - на вход элемента И и одновременно на сбрасывающий вход триггера IJz, сигналы датчика Фз - на входы элементов Яз и И секции и на входы элементов И смежных секций
(п-1), инверсный сигнал датчика Ф - на вход элемента М. Команда на передвижку секции крепи подается с комбайна датчиком его местоположения в лаве (или с пульта управления) на один из входов элемента Я2.
Б исходном положении секции крепи находятся в состоянии распора, домкраты их передвижки полностью выдвинуты, что -соответствует заднему положению секций; датчики Ф1 и Фз выдают логические единицы, датчики Ф2 и Ф4 - логические нули. Поступающий от датчика местоположения комбайна (или с пульта управления) сигнал на передвижку п-ой секции крепи подается через элемент Я2 на элемент памяти Ях и далее на
один из входов элемента И. Если при этом секции крепи (п-1) и («+) находятся в состоянии распора, то и на остальные входы элемента Я поступают сигналы (логические единицы) и с выхода этого элемента через
вующими клапанами передвигаемой секции, подаются команды на слив и передвижку данной секции. Как только с секции будет снят распор или она начнет передвигаться через элемент ИЛИ, происходит сбрОС .памяти с триггера П (сброс запоминания команды, поступившей от датчика местоположения комбайна или с пульта управления). После передвижки данной секции сигнал датчика Ф произведет сброс памяти С триггера П. Одновременно этот сигнал поступит на один из входов элемента И. По окончании ра-опора секции на второй вход элемента И поступит сигнал датчика Фз, и на входе элемента И появится сигнал сброса памяти триггером /7 Остальные- элементы устройства, реализующего описываемый .способ, используются для индикации (контроля) состояния секций крепи; они не участвуют в управлении данной секцией и оказьшают влияние лишь на процесс управления последующими секциями.
Последовательный или шахматный порядок передвижки секций крепи в лаве автоматически устанавливается следующим образом.
Секции крепи иередвигаются последовательно, если скорость комбайна такова, что к мотменту подачи команды па передвижку я-ой секции передвижка предыдущей (п-1) секции закончена и она находится в состоянии распора; в этом случае на входы элемента Ях поступают сигналы, О; распоре смежных секций (п-1) и (ft-J-1).
Когда скорость комбайна возрастает и команда на передвижку очередной п-ой секции крепи подана, а передвижка предыдущей (п-1.) секции еще не закончена, тогда передвижка очередной секции задерживается, так как на одном из выходов элемента Я) отсутствует сигнал распора предыдущей секции. При этом комбайн продолжает двигаться, команда на передвижку очередной секции «запоминается триггером //1 и выполняется лишь тогда, когда (л-1) и () - смежные секции будут находиться одновременно в состоянии распора. ,
При высокой скорости движения комбайна может возникнуть такая ситуация, - при которой передвижка (я-1) секции еще не закончена, ас датчика месторасположения комбайна уже поступят, команды, на -передвижку л-ой и («+) секций. В .этом случае на некотором участке лавы секции .крепи будут передвигаться в шахматном порядке.
Действительно (п-2) секция передвинута и находится в состоянии распора, (л-) секция находится в состоянии передвижки; триггер п-ой секции «запомнил команду на передвижку этой .секции, но она де движется, так как на входе элемента И отсутствует сигнал о распоре (п-1) секции; начинается передвижка (п-{-1) секции, на входы элемента И которой поступили команды триггера П на ее передвижку и сигналы о распоре л-ой (непередвинутой) и (л-|-2) секций.
Если соотношение между скоростями выемки угля и крепления очистного пространства не меняется, то передвижка (л-|-1) секции не заканчивается к моменту подачи датчиков, местоположения комбайна команд па пере
движку («+2) и (л+З) секций.
При этом (л-|-2) секция временно остается на «старой дороге, а (л-|-3) начнет передвигаться. Тогда на данном участке лавы передвигаются (л-I), () и (л+З) секций,
т. е. передвижка крепи происходит в шахматном порядке. Как только (л-1) и (л-|-1) секции передвинутся на «новую дорогу и придут в состояние распора, начнет передвигаться л-ая секция, на входах элемента И которой имеется команда ее триггера П и появились сигналы датчиков распора (л-1) и (л+О секций. Таким образом осуществляется додвижка ранее непередвинутых секций крепи. При снижении скорости движения комбайна автоматически установится опять последовательный порядок передвижки секций.
Предмет изобретения
Способ автоматического управления передвижной механизированной шахтной крепью с контролем распора и перемещения стоек и секций крепи и минимального уровня верхняков, получением и обработкой информации о
взаимпом положении выемочной машины и секций крепи, отличающийся тем, что, с целью повышения производительности угледобывающего, комплекса с передвижной механизированной крепью, порядок передвижки
секций крепи изменяют в зависимости от скорости движения выемочной машины, например с последовательного на шахматный с додвиганием непередвинутых секций, или наоборот, с шахматного на последовательный, путем подачи сигналов датчика местонахождения выемочной машины в запоминающее устройство, а выдаваемые последним команды на передвижку очередной секции исполняют при одновременном распаре двух смежных
секций крепи.
АВория
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗВИТИЯ ЛАВЫ ИЗ ГОРНОЙ ВЫРАБОТКИ | 2008 |
|
RU2370648C1 |
| Крепь сопряжения | 1987 |
|
SU1507981A1 |
| Комплектная металлическая крепь | 1957 |
|
SU121410A1 |
| СПОСОБ НЕПРЕРЫВНОЙ ВЫЕМКИ УГЛЯ ОЧИСТНЫМ КОМПЛЕКСОМ | 1996 |
|
RU2134791C1 |
| Агрегатированная механизированная крепь | 1989 |
|
SU1739046A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2010 |
|
RU2434138C1 |
| Способ управления механизированным комплексом в профильной плоскости пласта в направлении движения | 1978 |
|
SU775334A1 |
| Система телемеханики для управления передвижкой секций шахтной гидрокрепи | 1985 |
|
SU1269171A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2009 |
|
RU2411363C1 |