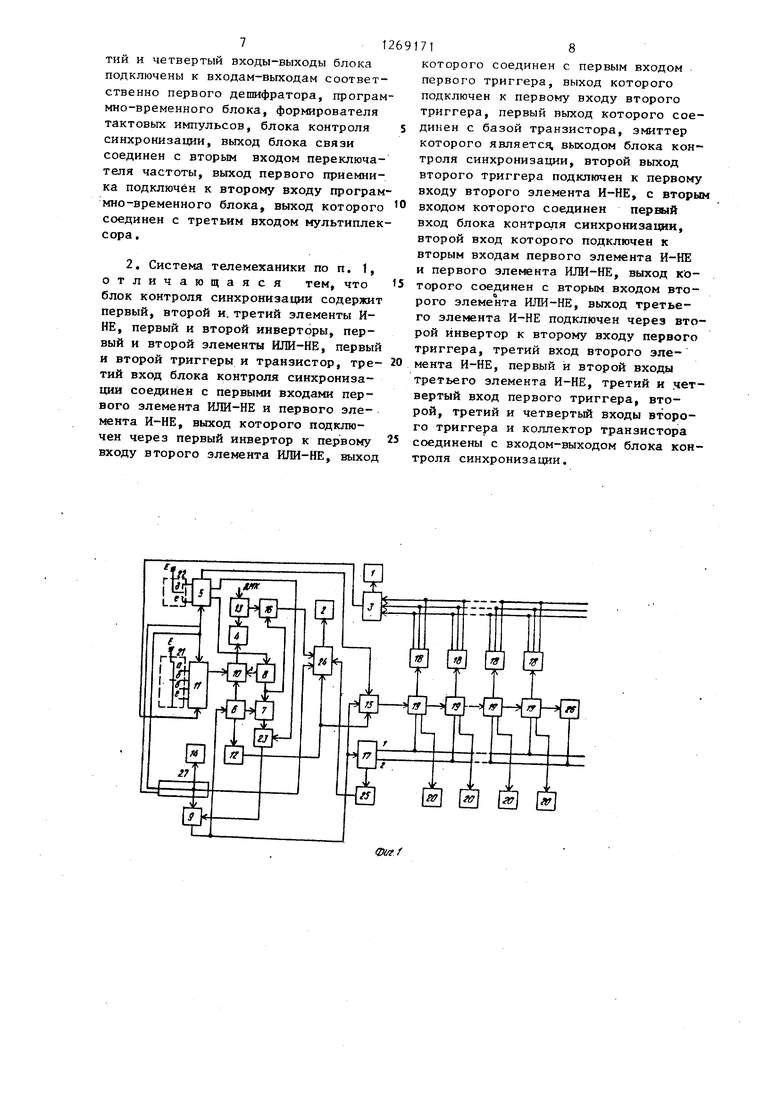
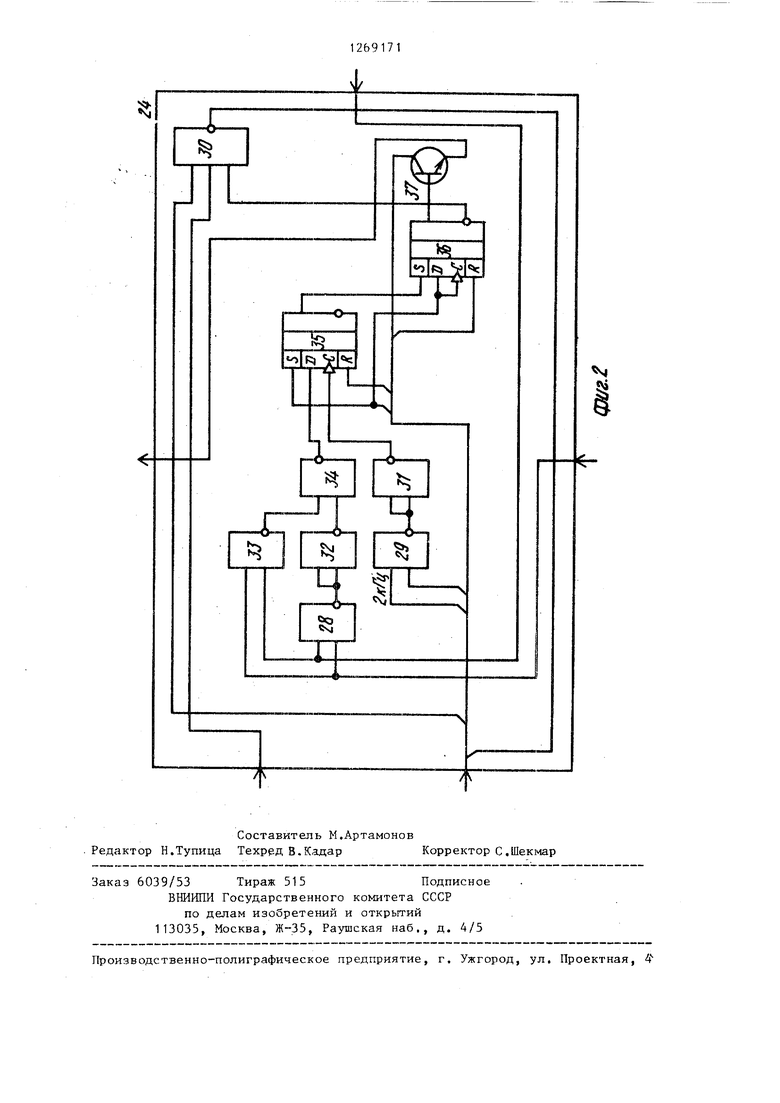
Изобретение относится к автоматике и телемеханике и может быть использовано для управления передвижкой секции шахтной гидрокрепи, Цель изобретения - повьшение функциональной надежности системы. На фиг. 1 представлена функ:циональная схема системы телемеханики для управления передвижкой сек;ций шахтной гидрокрепи; на фиг. 2 - прин ципиальная схема блока контроля синхронизации. Система содержит блок 1 индикации состояний секций, блок 2 индикации ава рии, приемник 3, блок 4 индикаисии номера секции, дешифратор 5, счетчик 6 секций, блок 7 сравнения, регистр 8, переключатель 9 частоты, мультиплексор 10, программно-времен ной блок-11, дешифратор 12, счетчик 13 местоположения комбайна, формирователь 14 тактовых импульсов, блок 15 синхронизации, блок 16 сравнения усилитель 17 тактовых импульсов, датчики 18 положения секций, распределитель 19, электрогидроклапан 20, переключатель 21 режима, переключатель 22 рода сигналов, счетчик 23 циклов, блок 24 контроля синхронизации, приемник 25, генератор 26„ блок 27 связи. - Блок 24 контроля синхронизадаи со держит элементы И-НЕ 28-30, инверторы 31 и 32, элементы ИЛИ-НЕ 33 и 34 триггеры 35 и 36, транзистор 37. Устройство работает следуюпд-ш образом. Автоматизированные комплексы с крепью предназначены для выемки угля и крепления призабойного пространства, а также поддержания кровли в лавах. Крепление выработанного пространства осуществляется секциями телескопической крепи. Технология передвижки секций шах твой гидрокрепи подразделяется на два этапа: первый (известный) - цикл операций по передвижке предваритель но выбранной секции гидрокрепи; вто рой - выбор секции гиДрокрепи. Так как комплекс состоит из секций гид-. рокрепи и цикл операций п6 передвиж ке каждой из них один и тот же, то и алгоритм передвижки их одинаков. Он состоит из следующих операи й: разгрузка с передвижкой секции к забою, двухсекундная дотяжка се;кции распор секции, двухсекундный дораспор сек1щи. Об окончании определенной операции судят по срабатыванию соответствующего датчика или по сигналу с датчика временных интервалов. Алгоритм передвижки секции реализуется с помощью программы, записанной в блоке 11. Система телемеханики предназначена для управления передвижкой секции шахтной гидрокрепи в автоматическом и дистанционном режимах с пульта оператора, расположенного на штреке, а также для сбора и отображения на пульте информации о состоянии крепи и комбайна. Предусматривается три режима работы системы: режим диста нционного управления, автоматического управления и контроля. В положеьши переключателя 21 режима Отключено при любых коммутационных операциях с переключателями 21 и 22 в начале каждого цикла контроля, а также переключения ячейки распределителя во время автоматической передвижки, блок 15 синхронизации и дешифратор 5 ориентируют сисIтему. Тактовые шины распределителя при этом обесточиваются. Исключение составляет регистр 8, который может сбрасываться в О только в режиме Дистанционное - выбор по желанию оператора. Режим дистанционного управления. Переключатель 9 частоты (2 Гц, 1 кГц) при переводе переключателя 21 режимов начинает пропускать с выхода формирователя 14 тактовых импульсов через блок 27 тактовые импульсы с максимальной частотой следования (1 кГц) одновременно на входы усилителя 17, счетчика 6 и блока 15 синхронизации, вследствие чего достигается синхронность работы устройства. Первый пришедший в блок 15 тактовый импульс запрещает действие сигнала ориентировки в О счетчика 6 и формирует стартовый импульс для запуска п -и ячейки распределителя 19, Второй тактовый импульс устанавливает на выходе счетчика 6 комбинацию, соответствующую номеруя -и секции крепи, прекращает действие сигнала установки в нулевое состояние тактовых шин и включает п -ю ячейку распределителя 19. Затем с тактовой частотой следования импульсов осуществляется последовательный в порядке убы31
вания выбор ячеек распределителя 19: И-1,п-2, ..,, 2,1. Предпоследний тактовый импульс вместе с последней ячейкой распределителя 19 включает генератор 26, при этом приемник 25 принимает высокочастотный сигнал от генератора 26.
Блок 24 контроля синхронизации фиксирует синхронную работу счетчика в секции и распределителя 19 при помощи дешифратора 12 (перестраивающегося устройства, фиксирующего номер последней, работающей от пульта управления секции крепи), подключенного к выходу счетчика 6, и приемника 25 соответственно. Тактовая частота 1 кГц (2 кГц) поступает через элементы И-НЕ 28-30 на триггер 35 с целью получения на его С-входе задержанного на 750 МКС (для надежноети) переднего фронта счетного импульса. При этом на его первый вход через элементы И-НЕ 28-30 и ИЛИ-НЕ 33 и 34 поступают два внешних управлякщих сигнала с дешифратора 12 и приемника 25. Оба они при синхронной работе системы формируют уровень логического OV первый при фиксации счетчика 6 номера последней работающей от пульта управления секции крепи, второй при включении последней ячейки двухтактного тиристорного распределителя 19 и это не приводит к переключению триггеров 35 и 36.
В случае их несинхронного поступления (рассинхронизации) или при одновременном включении двух и более ячеек распределителя 19, приводящим к рассинхронизации (счетчик 6 фиксирует только номер одной включенной ячейки распределителя), происходит переключение триггера 35 и последовательно подключенного к нему триггера 35. При этом с триггера 36 поступает на вход элемента И-НЕ 30 сигнал логического О, а .на базу транзистора 37 - сигнал логической 1. Они соответственно запрещают автоматическую передвижку (сигнал с выхода элемента И-НЕ 30) и индицируют с помощью блока 2 о нарушении синхронизации в системе (сигнал с транзистора 37), что позволяет оператору принять соответствующее решение. Для предотвращения накопления ошибок при рассинхронизации служит блок 15 синхронизации.
714
Последний тактовый импульс ориентирует всю систему, исключение составляет только регистр 8. Окончен первый цикл контроля системы телемеханики.
Число повторяющихся циклов контроля задается при помощи счетчика 23 циклов-, отсчитывающих их от блока 7 сравнения. В случае обрыва тракта телемеханики генератор 26 подключается к последней годной ячейке распределителя 19, номер которой задается дешифратором 12, причем схема устройства при этом сохраняет все перечисленные свойства, а также полную достоверность информации, получаемой с блока 4 индикации номера секции. Это стало возможным благодаря подключению через мультиплексор 10 блока 4 индикации номера секции к регистру 8, вследствие чего оператор может осуществлять дополнительный визуальный контроль за состоянием регистра 8, в который при помощи переключателя 22 рода сигналов вводится в порядке возрастания 1,2,...,п-1, п номер ячейки, предназначенный для выбора. После осуществления заданного количества циклов контроля, выбор приостанавливается на ячейке распределителя 19, номер которой задан регистром 8.
Режим автоматической работы. Он аналогичен дистанционному режиму. После перевода переключателя 21 .режимов в положение Автоматическое, осуществления заданного числа циклов контроля, начинается автоматическая передвижка крепи с выбранной секции, номер которой задан регистром 8. Функции оператора при этом выполняет блок 11, в память которого заложена программа управления передвижкой секции крепи. Контроль за положением секции осуществляется с помощью блока 1 индикации состояния секции после приема сигналов от датчиков 18 положения крепи приемником 3. Секция разгружается и передвигается в переднее положение. После срабатывания датчика переднего положения она распирается, а замыкание ее датчика распора является командой на выбор регистром 8 номера следующей секции крепи. Затем осуществляется заданное количество циклов контроля и в случае синхронности в работе , а также при допустимом удалении ком51байна, анализируемом счетчиком 13, блокам 16 сравнения дается команда на передвижку следующей секции крепи . При недопустимом удалении комбайна сигнал на передвижку следующей .секции не подается. При рассинхронизации системы, неполной передвижке и нераспоре секции крепи передвижка приостанавливается, и оператор принимает решение о дальнейшей работе. Режим контроля. В этом режиме, аналогично дистанционному, осуществляется непрерывный циклический кон троль за состоянием тракта телемйханики, секций крепи в .лаве, положением конвейера (балки), за синхронностью хода распределителя 19 и счетчика 6. Причем минимальная частота опроса (тактовая частота), получаемая от переключателя 9 частоты удобна для восприятия оператором дешифрованных сообщений. В этом режиме мультиплексор 10, переключая блок 4 индикации номера секции с ре гистра 8 на счетчик 6, позволяет ,90 хранять информацию неизменной. ЧПроцесс выбора ячейки распредели теля 19 от диспетчерского пункта с убыванием порядкового номера п , п -1 п-2,п -3-2, 1 позволяет исключить дополнительную шину запуска, сохранить достоверную, информацию на блоке 4 индикахщи йомёра секции, точно по номеру ячейки распределите ля 19 определять место повреждения тракта телемеханики. Формула изобретени 1. Система телемеха.ники для управления передвижкой секций шахтной гидрокрепи, содержащая распределитель, первые выходы которого подклю чены к входам соответствующих датчи ков положения секций, выходы которы подключены к соответствующим проводам линии связи, которая соединена входами первого приемника, первый выход которого подключен к входу бло ка индикации состояний секций, вторые выходы распределителя соединены с вxoдa м электрогидроклапанов, уси литель тактовых импульсов, блок син хронизации, счетчик местоположения комбайна, блок индикации номера сек ции, переключатель рода сигналов, подключенный к.входу первого дешифр 16 тора, регистр, первые выходы котороRO соединены с первыми входами первого блока сравнения, к второму входу которого подключен первый выход счетчика секций, выход переключателя режимов соединен с первыми входами программно-временного блока, блок индикации аварии, формирователь тактовых импульсов, отличающаяс я тем, что, с целЕю йовышения функциональной надежности, в нее введены генератор, второй приемник, блок контроля синхронизации, мультиплексор, второй блок сравнения, второй дешифратор, блок связи, переключатель частоты, счетчик циклов, первый выход первого дешифратора подключен к первому входу счетчика циклов, выход которого соединен с первым входом переключателя частоты, выход которого подключен к первым входам блока синхронизации, усилителя и счетчика секций, второй выход которого соединен с первым входом мультиплексора, выход которого подключен к первому входу блока индикации номера секции, с вторым входом которого соединен первый выход счетчика, второй выход которого подключен к первому входу второго блока сравнения, выход которого соединен с первым входом блока контроля синхронизации, выход которого подключен к входу блока индикации аварии, второй выход первого дешифратора соединен с вторым входом блока синхронизации, выход которого подключен к первому входу распределителя, второй выход которого соединен с генератором, первый выход усилителя подключен к второму входу распределителя, второй выход усилителя соединен с третьим входом распределителя и с выходом генератора, третий выход усилителя через второй приемник подключен к второму входу блока контроля синхронизации, третий выход счетчика секций через второй дешифратор соединен с третьими входами блока контроля синхронизации и блока синхронизации, третий выход первого дешифратора подключен к первому входу регистра, второй выход которого соединен с вторым входом мультиплексора, первый выход регистра подключен к второму входу второго блока сравнения, выход первого блока сравнения соединен с вторым входом счётчика циклов, первый, второй, тре71
тий и четвертый входы-выходы блока подключены к входам-выходам соответственно первого дешифратора, программно-временного блока, формирователя тактовых импульсов, блока контроля синхронизации, выход блока связи соединен с вторым входом переключателя частоты, выход первого приемника подключён к второму входу программно-временного блока, выход которого соединен с третьим входом мультиплексора,
2. Система телемеханики по п. 1, отличающаяся тем, что блок контроля синхронизации содержит первый, второй и. третий элементы ИНЕ, первый и второй инверторы, первый и второй элементы ИЛИ-НЕ, первый и второй триггеры и транзистор, третий вход блока контроля синхронизации соединен с первыми входами первого элемента ИЛИ-НЕ и первого элемента И-НЕ, выход которого подключен через первый инвертор к первому входу второго элемента ИЛИ-НЕ, выход
1718
которого соединен с первым входом первого триггера, выход которого подключен к первому входу второго триггера, первый выход которого соединен с базой транзистора, эмиттер которого являете выходом блока контроля синхронизации, второй выход второго триггера подключен к первому входу второго элемента И-НЕ, с вторым входом которого соединен первый вход блока контроля синхронизации, второй вход которого подключен к вторым входам первого элемента И-НЕ и первого элемента ИЛИ-НЕ, выход которого соединен с вторым входом второго элемента ИЛИ-НЕ, выход третьего элемента И-НЕ подключен через второй инвертор к второму входу первого триггера, третий вход второго элемента И-НЕ, первый и второй входы третьего элемента И-НЕ, третий и четвертый вход первого триггера, второй, третий и четвертый входы второго триггера и коллектор транзистора соединены с входом-выходом блока контроля синхронизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления перемещением секций шахтной гидрокрепи | 1984 |
|
SU1233200A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖКОЙ СЕКЦИИ ШАХТНОЙ ГИДРОКРЕПИ | 1969 |
|
SU245710A1 |
| Способ диагностики неисправностей телемеханического тракта аппаратуты автоматики шахтной гидрокрепи для пластов крутого падения | 1985 |
|
SU1399475A1 |
| Устройство телемеханики для сосредоточенных объектов | 1975 |
|
SU532878A1 |
| Устройство телемеханики для сосредоточенных объектов | 1980 |
|
SU928389A1 |
| УСТРОЙСТВО КОНТРОЛЯ линии связи | 1972 |
|
SU341171A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ ОБЪЕКТОВ С ИНЕРЦИОННЫМИ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 1973 |
|
SU393762A1 |
| Система управления гидрофицированной установкой | 1980 |
|
SU1143837A1 |
| УСТРОЙСТВО ДЛЯ ТЕКУЩЕГО КОНТРОЛЯ И СТАТИСТИЧЕСКОГО АНАЛИЗА ОТКЛОНЕНИЙ НАПРЯЖЕНИЯ | 1997 |
|
RU2130199C1 |
| Устройство для вывода информации | 1985 |
|
SU1285460A1 |
Изобретение относится к автоматике и телемеханике и может быть использовано для управления передвижной секцией шахтной гидрокрепи. Цель изобретения - повышение функциональной надежности системы. Передвижка секции шахтной гидрокрепи подразделяется на два этапа: первый - цикл операций по передвижке предварительно выбранной секции гидрокрепи, второй - выбор секции гидрокрепи. Алгоритм передвижки состоит из следующих операций: разгрузка с передвижкой секхщи к забою, дотяжка секции, распор секции, дораспор секции. Система имеет три режима работы: режим дисW танционного управления, автоматического управления и контроля. 1 з.п. ф-лы, 2 ил.
| Аппаратура автоматизации механизированного комплекса КГ САКГ.ОО.ООО.РЭ | |||
| Руководство по зксплуатации | |||
| Донецк, 1979 | |||
| Сборник научньпс трудов института Донавтоматгормаш, 1981, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖКОЙ СЕКЦИИ ШАХТНОЙ ГИДРОКРЕПИ | 0 |
|
SU245710A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
