(54) СПОСОБ УПРАВЛЕНИЯ МЕХАНИЗИРОВАННЫМ КОМПЛЕКСОМ В ПРОФИЛЬНОЙ ПЛОСКОСТИ ПЛАСТА В НАПРАВЛЕНИИ ДВИЖЕНИЯ
Изобретение относится к cnocoQaiA управления очистным механизированным комплексом по гипсометрии угольного пласта или другого полезного ископаемого в направлении движения 5 и особенно к способам управления очистным механизированным комплексом (агрегатом), включающим агрегатную механизированную крепь, на базе которой установлена выемочная машина, 10
Известен способ управления очистным механизированным комплексе в профильной плоскости пласта в направлении движения, заключающийся в выполнении очистным механизированным t5 комплексом повторяющихся выемочных циклов при постоянном чередовании и/или совмещении в циклах операций передвижка базы агрегатной крепи с выемочной машиной (зарубка), отбойка 20 угля выемочной машиной, снятие распора, передвижка и распор секций крепи между боковыми породами. При этом стремятся как можно точнее следовать базой крепи( контролируя 25 изменение ее углового положения) с выемочной машиной по почве (кровле)пласта, т. е. копировать почву, чтобы как можнр полнее вынуть уголь из пласта, оставляя в почве 30
неровности (гребешки)возможно меньшей величины tl.
Недостатком известного способа управления очистным механизированным комплексом в профильной плоскости пласта в направлении его движения является возникающее в процессе отработки пластов угля противоречие между стремлением кик можно точнее скопировать базой комплекса (агрегата) почву или кровлю пласта, чтобы полнее вынуть уголь, и кинематичес кими возможностями базы крепи и комплекса копировать почву пласта. Однако углы скручивания пластов, оп- ределяющие необходимые кинематические параметры без агрегатных механизированных крепей, могут изменяться в широких пределах соответственно для пластов средней мощности до 4,5 и 6 град/м и значительно превышают возможности всех баз серийных и опытных крепей к -скручиванию. Ограничены возможности по интенсивности скручивания базы серийных агрегатных механизированных крепей до 1 град/м.
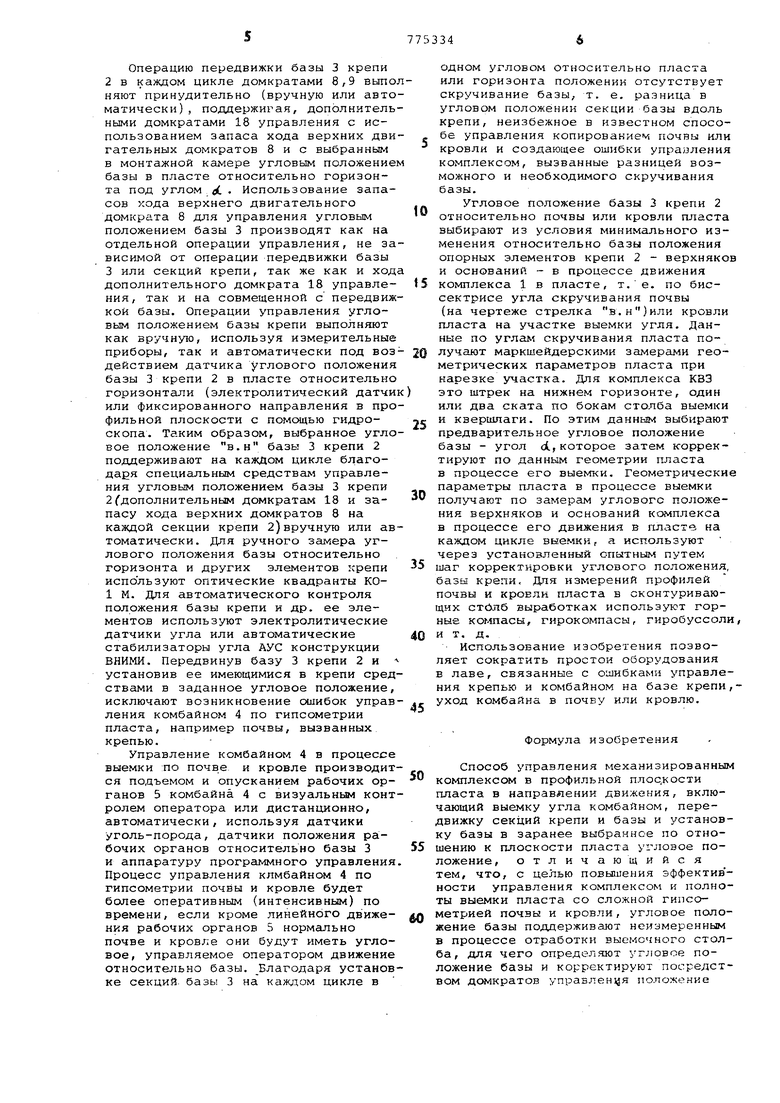
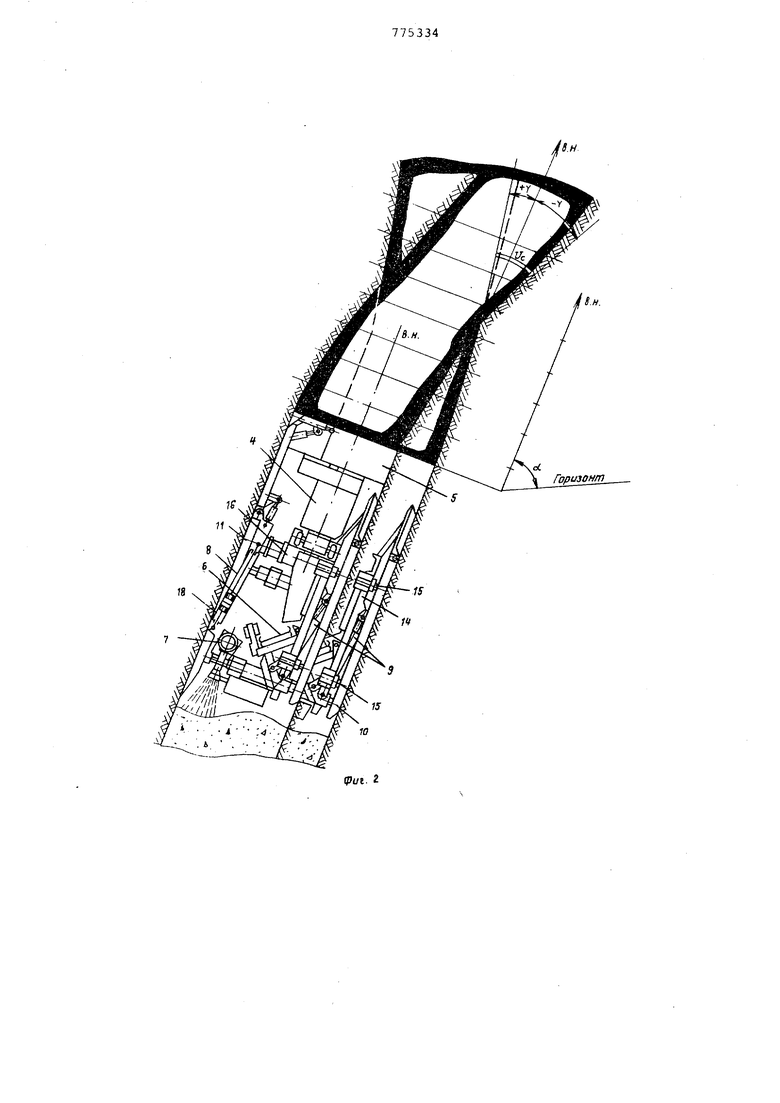
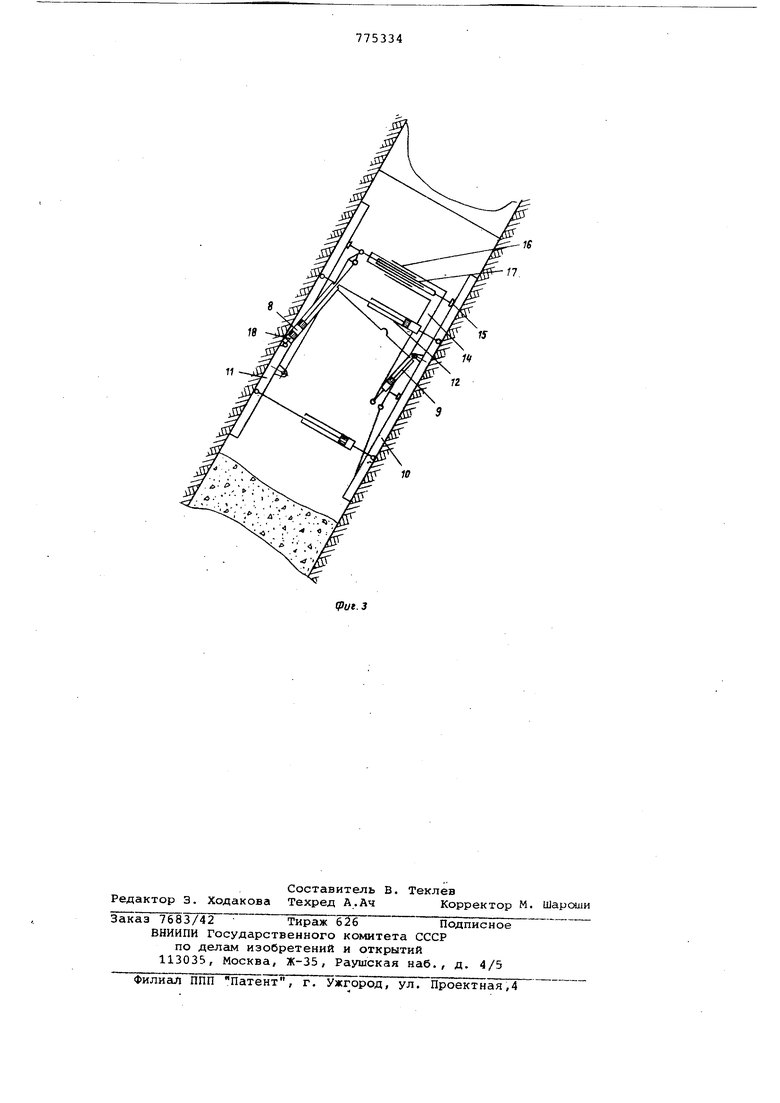
На-иболее близким решением по технической сущности и достига€Мому результату является способ управления механизированным компле-{ссом в профильной плоскости пласта в направлени движения, включающий выемку угля. комбайном,- передвижку секций крепи и базы и установку базы в заранее выбранное по отношению к плоскости пласта угловое положение f2j. Недостатками такого способа управления являются недостаточная эффективность управления комплексом и неполнота выемки пласта со сложной гипсометрией почвы и кровли, так как положение база в процессе передвижения не поддерживается в заранее выбранном угловом положении. Целью изобретения является повышение эффективности управления комплексом и полноты выемки пласта со сложной гипсометрией почвы и кровли. Поставленная цель достигается тем что угловое положение базы поддерживают неизменным в процессе отработки выемочного столба, для чего, определяют угловое положение базы и корректи руют посредством домкратов управлени положение базы, которую устанавливают по биссектрисе угла скручивания почвы или кровли пласта. Указанный способ управления очист ным механизированным комплексом в профильной плоскости пласта путем контроля за изменением на каждом цик ле ее углового положения приспосабли ваться (копировать почву или кровлю, т. е. гипсометрию пласта) снимает тем самым и ограничения по интенсивности скручивания базы, накладываемы геометрией пласта и выемочной машиной на крепь. При этом рабочие органы выемочной машины как и раньше, перемещаясь относительно базы нормал но почве автоматически или управляемые оператором, отрабатывают пласт по границе уголь-порода, достигая ту же цель - наиболее полно вынуть уголь Но в этом случае s eньшaютcя ошибки управления комплексом, .вызванные, недостаточными на сегодняшний день техническими возможностями агрегатных механизированных крепей и особен но их баз по интенсивности скручивания. На фиг. 1 показан очистной механизированный комплекс, план на фиг.2 секция механизированной крепи} на фиг. 3 - кинематическая схема крепи. Очистной механизированный комплекс 1 включает крепь 2, на распорной, базе -3 которой установлены чел-о нокювый комбайн 4 с двумя исполнител ньл4и органаЛ1и 5 по концам, конвейер 6, гидррзаклсщочное оборудование 7. Крепь 2 поддерживающего типа закл чает секции крепи, связанные со звеньями базы 3 домкратами 8 и 9. Секция крепи 2 включает основание 10, верхняк 11, стойки 12. Ваза 3 выполненс1 из звеньев 13, расположенных внутри крепи 2. Звено 13 базовой балки имеет форму уголка, рама-полка 14 которого параллельна основанию и опирается на него двумя гидропатронами 15, другая - телескоп 16 вьтолнена нормально основанию, телескопичной или распирается домкратом 17между основанием 10 и верхняком 11. Все звенья базовой балки соединены между собой шарнирами (замками) в трех точках в продольном сечении, образуя вдоль забоя три сило.вых пояса - два на нижней раме 14 и один rfa Корпусе телескопа 16. Домкрат 8 связывает верхний телескоп 16 звена базы 3 с верхняком 11, а домкрат 9 нижнюю раму 14 с основанием 10. Штоковые плоскости домкратов 8 и 9-соединены между собой гидравлически, чем обеспечивается их гидравлическая объемная синхронизация и равномерная без угловых колебаний выдвижка базы. Питание домкратов при передвижении базы 3 подводится к поршневой полости домкратов 8, при передвижении секции крепи 2 - к поршневой полости домкрата 9. Изменение углового положения базы 3 на забой обеспечивается дополнительным домкратом 18. Наклон базы может производиться оператором с пультра ручного управления крепи. Контроль углового положения базы при ручном управлении производится замером из крепи углового положения рамы 14 базы 3 в трех точках по длине крепи (в середине и по краям) оптическим квадрантом КО-1М на каждом выемочном цикле. Корректировка положения базы 3 на забой производится в конце операции по ее передвижке путем включения сразу всех дополнительных домкратов 18 или домкратов 8 при наклоне ее на завал. При автоматическом поддерживании углового положения базы относительно горизонта электролитический датчик или другого типа датчик устанав-. ливают под згицитой звена базы на корпусе телескопа 16 с завальной стороны. Сигнал датчика об угловом положении базы передается через усилитель на электрогидрораспределитель, управляющий дополнительным домкратом 18и домкратом каждого звена базы. В процессе движения очистного комплекса 1 в пласте угля он совершает повторяющиеся выемочные циклы, в которых например, для комплекса КВЗ чередуются операции: передвижка базы 3 агрегатной механизированной крепи 2 с комбайном 4, в процессе которой происходит зарубка комбайна 4; снятие распора, подтягивание секций крепи 2 к базе 3 и их распор между боковыми породами, отбойка угля комбайном 4, перемещающимся по на-. правляклцим базы 3 крепи 2 вдоль забоя, раскрепление забоя перед комбайнсм 4 и крепление его после прохода.
Операцию передвижки базы 3 крепи
2в каждом цикле домкратами 8,9 выпол няют принудительно (вручную или автоматически) , поддержигая, дополнительными домкратами 18 управления с использованием запаса хода верхних двигательных домкратов 8 и с выбраннЕэ1М
в монтажной Kajviepe угловым положением базы в пласте относительно горизонта под углом аС . Использование запасов хода верхнего двигательного домкрата 8 для управления угловым положением базы 3 производят как на отдельной операции управления, не зависимой от операции передвижки базы
3или секций крепи, так же как и хода дополнительного домкрата 18 управления, так и на совмещенной с передвижкой базы. Операции управления угловым положением базы крепи выполняют как вручную, используя измерительные приборы, так и автоматически под воздействием датчика углового положения базы 3 крепи 2 в пласте относительно горизонтали (электролитический датчик или фиксированного направления в профильной плоскости с помощью гидроскопа. Таким образом, выбранное угловое положение в.н базы 3 крепи 2 поддерживают на каждом цикле благодаря специальным средствал управления угловым положением базы 3 крепи
2fдополнительным домкратам 18 и запасу хода верхних домкратов 8 на каждой секции крепи 2)вручную или автоматически. Для ручного замера углового положения базы относительно горизонта и других элементов крепи используют оптические квадранты КОМ. Для автоматического контроля положения базы крепи и др. ее элементов используют электролитические датчики угла или автоматические стабилизаторы угла АУС конструкции ВНИМИ. Передвинув базу 3 крепи 2 и установив ее имеющимися в крепи средствами в заданное угловое положение, исключают возникновение ошибок управления комбайном 4 по гипсометрии пласта, например почвы, вызванных крепью.
Управление комбайном 4 в процессе выемки по почве и кровле производится подъемом и опусканием рабочих органов 5 комбайна 4 с визуальньм контролем оператора или дистанционно, автоматически, используя датчики уголь-порода, датчики положения рабочих органов относительно базы 3 и аппаратуру программного управления. Процесс управления клмбайном 4 по гипсометрии почвы и кровле будет более оперативным (интенсивным) по времени, если кроме линейного движения рабочих органов 5 нормально почве и кровле они будут иметь угловое, управляемое оператором движение относительно базы. Благодаря установке секций, базы 3 на каж;дом цикле в
одном угловом относительно пласта или горизонта положении отсутствует скручивание базы, т. е. разница в угловом положении секции базы вдоль крепи, неизбежное в известном способе управления копированием почвы или кровли и создающее ошибки упраиления комплексом, вызванные разницей возможного и необходимого скручивания базы.
Угловое положение базы 3 крепи 2
0 относительно почвы или кровли пласта выбирают из условия минимального изменения относительно базы положения опорных элементов крепи 2 - верхняков и оснований - в процессе движения
5 комплекса 1 в пласте, т. е. по биссектрисе угла скручивания почвы
(на чертеже стрелка в.н)или кровли пласта на участке выемки угля. Данные по угла.м скручивания пласта получают маркшейдерскими замерами гео0метрических параметров пласта при нарезке участка. Для комплекса КВЭ это штрек на нижнем горизонте, один или два ската по бокам столба выемки и квершлаги. По этим данным выбирают
5 предварительное угловое положение базы - угол d., которое затем корректируют по данным геометрии пласта в процессе его выемки. Геометрические параметры пласта в процессе выемки
0 получают по замерг1м углового положения верхняков и оснований комплекса в процессе его движения в пласте на каждом цикле выемки, а используют через установленный опытным путем
5 шаг корректировки углового положения, базы крепи. Для измерений профилей почвы и кровли пласта в сконтуривающих стОлб выработках используют горные компасы, гирокомпасы, гиробуссоли,
0 и т. д.
Использование изобретения позволяет сократить простои оборудования в лаве, связанные с ошибками управления крепью и комбайном на базе крепи,уход комбайна в почву или кровлю.
5
Формула изобретения
Способ управления механизированным
0 комплексом в профильной плос.кости пласта в направлении движения, включающий выемку угла комбайном, передвижку секций крепи и базы и установку базы в заранее выбранное по отно5шению к плоскости пласта угловое положение, отличающийся тем, что, с целью повышения эффективности управления комплексом и полноты выемки пласта со сложной гипсометрией почвы и кровли, угловое поло0жение базы поддерживают неизмеренным в процессе отработки выемочного столба, для чего определяют тловое положение базы и корректируют посредством домкратов управлен1зя положение
базы, которую устанавливают по биссектрисе угла скручивания почвы или кровли пласта.
Источники информации, принятые во внимание при экспертизе
1. Рудановский А. А. О рациональных способах автоматического управления угледобывающими комплексами в профильной плоскости пласта - Уголь Украины, 1969, № 1, с. 19-22.
2. Авторское свидетельство СССР № 603751, кл, Е 21 Р 23/00, 06.08.75 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированная крепь для отработки крутых пластов угля | 1979 |
|
SU899999A1 |
| КРЕПЬ АГРЕГАТНАЯ (ВАРИАНТЫ) | 1995 |
|
RU2130121C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2009 |
|
RU2411362C1 |
| Механизированная крепь | 1982 |
|
SU1143851A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2010 |
|
RU2419722C1 |
| Механизированный комплекс для отработки мощных крутых угольных пластов | 1983 |
|
SU1222846A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2009 |
|
RU2411363C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2009 |
|
RU2412355C1 |
| СПОСОБ КРЕПЛЕНИЯ И УПРАВЛЕНИЯ КРОВЛЕЙ В ОЧИСТНОМ ЗАБОЕ, КРЕПЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА, МЕХАНИЗМ ТЕЛЕСКОПИЧЕСКОЙ ЗАТЯЖКИ ЗАЗОРОВ ПО КРОВЛЕ И ЗАВАЛУ, СОЕДИНЕНИЕ ОСНОВАНИЙ СЕКЦИЙ, НАПРАВЛЯЮЩАЯ БАЛКА КРЕПИ, МЕХАНИЗМ РАСПОРА СЕКЦИЙ КРЕПИ, МЕХАНИЗМ СКЛАДЫВАНИЯ КРЕПИ, КОЗЫРЕК ПЕРЕКРЫТИЯ КРЕПИ | 2001 |
|
RU2200843C2 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2010 |
|
RU2423611C1 |
18
V
14
гг
ie
