Изобретение относится к области вычислительной техники и дискретных измерений, изменяющихся во времени электрических сигналов, и употребляется При необходимости сокращения избыточности информации.
Известны адаптивные временные дискретизаторы (АВД), содержащие блок управления, блок модел.ирования аппроксимирующего полинома, реверсивный счетчик и узел Быдачи команды на измерение.
Предложенный дискретизатор отличается от известных тем, что В нем .первые три выходя блока управления соединены с соответствуюЩим.и входами блока моделирования атпроксимирующего полинома, четвертый выход бло;ка управления соединен с первым входом реверскЕного счетчика, а шятый - со входом управления узла выдачи команды на измерение, один -вход блока управления служит входом дискретизатора, а другой его вход соединен с ВЫХОДОМ узла выдачи команды на измерение, подсоединенным также к четвертому входу блока моделирования аппроксимирующего лолинома и служащим выходом дискретизатора; первый выход блока модел.ировании аппроксимирующего полинома соединен со вторым 1ВХОДОМ ревер сивного счетчика, а второй его выход соединен с третьим входом реверсивного счетчика; выход реверсивного счетчика соединен со вторым входом узла выдачи команды на измерение.
Дискретизатор также отличается тем, что з нем блок управления выполнен в виде генератора тактовых импульсов, ключей дешифратора, триггера, схемы «ИЛИ и ком.мутатора, причем ВЫХОД генератора тактовых импульсов через ключи соединен соответственно с первым входом дешифратора и первым входом триггера, выходы триггера соединены соответственно с лервым входом схемы «ИЛИ и первым входом коммутатора, выходы дешифратора соединены соответственно со входами управления ключей, вторым входом схемы «ИЛИ и
вторым и третьим входами 1коммутатора,первый, второй и третий выходы коммутатора служат соответственно первым, вторым и четвертым выходами блока управления, выход схемы «ИЛИ и выход триггера, соединенный
с первым входом коммутатора, соответственно третьим :и пятым выходами блока управления, четвертый вход коммутатора и соединенные собой вторые входы триггера и дешифратора служат соответственно первым и вторым входами блока управления.
Дискретизатор также отличается тем, что в нем блок моделирования аппроксимирующего полинома выполнен в виде реверсивных счетЧИков И блоков .переписи, причем выход первобло.ка переписи, первый выход которого соединен с одиим входом второго реверсивного счетчика, .выход последнего соединен с одним входом второго блока нерепнси; первый вход .первого реверсивного счетчика-служит входом блока моделнрования аппроксимирующего нолниома, вторые входы счетчиков соедииеиы между собой и 1служат вторым входом блока моделирования, второй вход иер.вого блока переписи Служит третьн;м входом блока моделироваиия, выход второго блока лереииси служит первым выходом блока модел.цр ОБ ан и я an и р о кс им и р у ю ще го П о л и н а, второй выход иерВОго блока нереииси соединен со вторым входом второго блока (переписи и служнт вторым ВЫХОДОМ блока моделирования.
Кроэде того, дискретизатор отличается тем, что в нем узел выдачи команды на измереПИе выполиеи в виде схем «Р1ЛИ и «И, прнче: 1 выход схемы «ИЛИ соедииен с одинм входом схемы «И, второй вход которой с.тужит входом управления узла, а выход-выходом узла, зходы Схемы «ИЛИ служат вторыми входами узла..
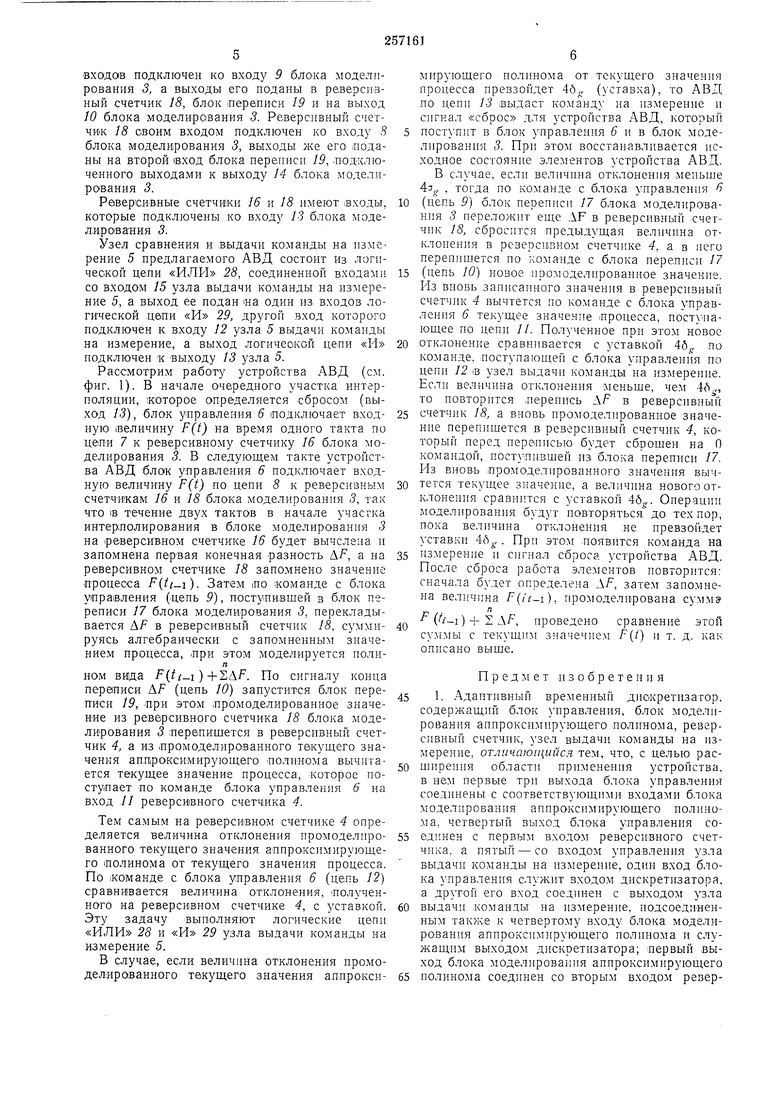
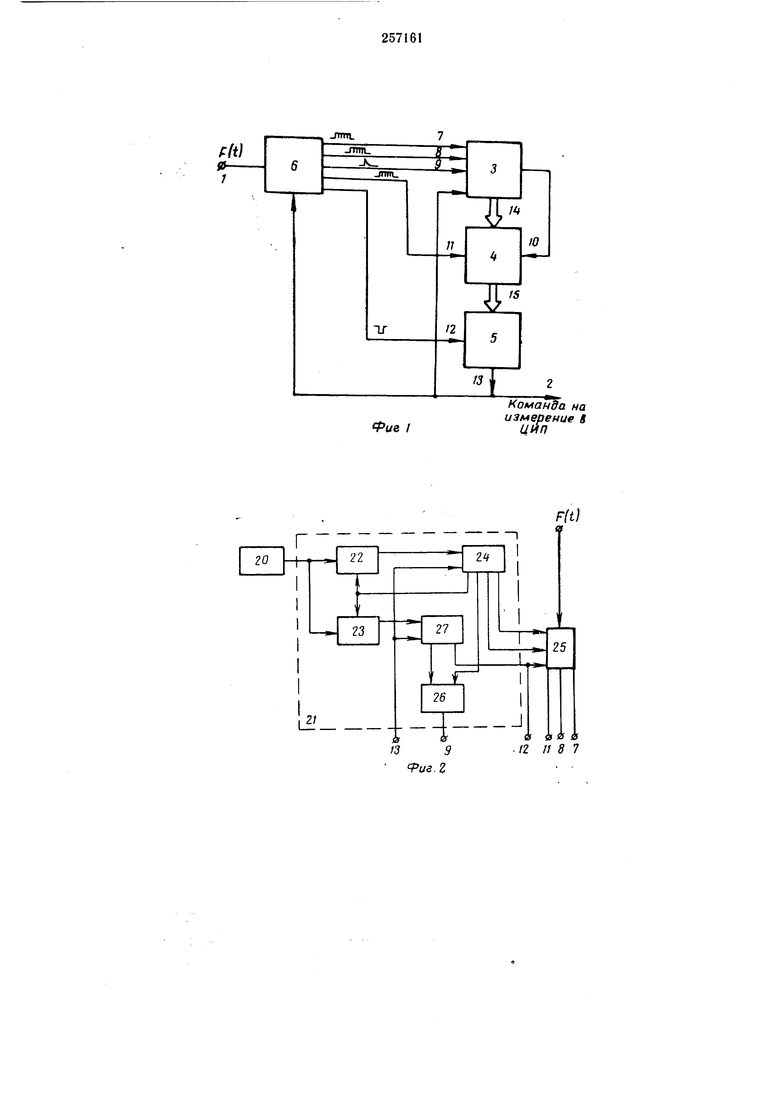
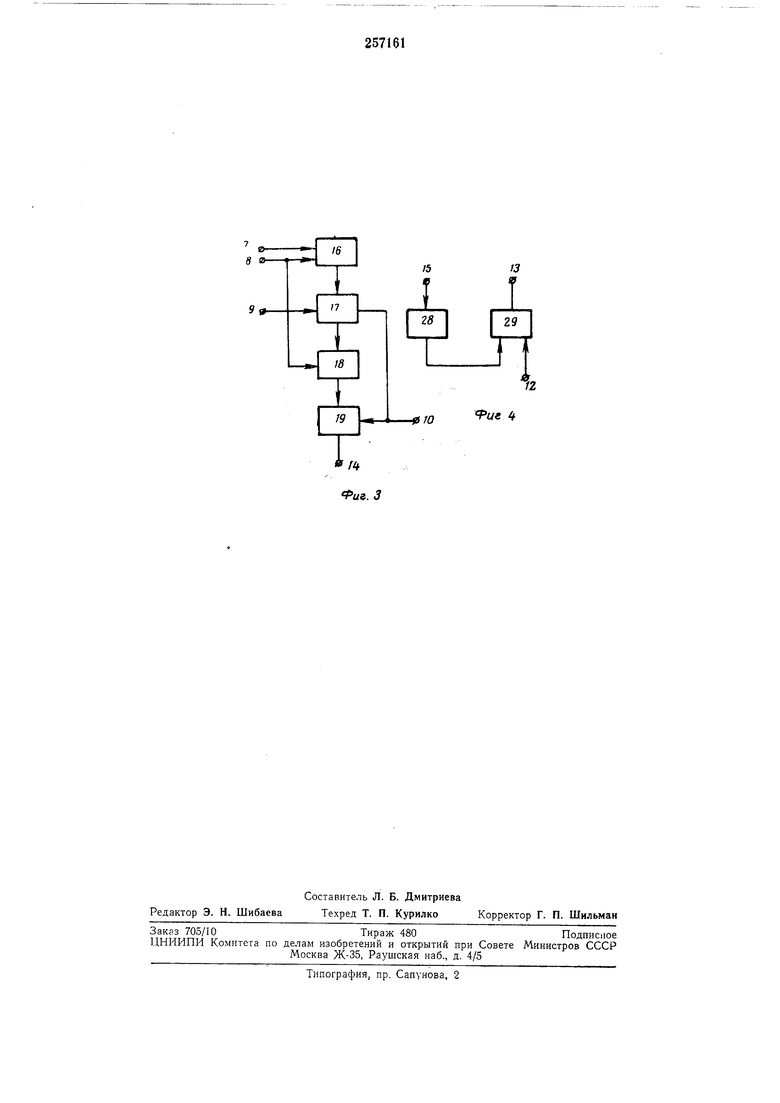
Иа фиг. 1 изображена структуриая схема данного АВД; на фиг. 2 - блок управления АВД; на . 3 - блок моделирования текущего значения аппроксимирующего полинома предлагаемого АВД; на фнг. 4 - узел выдачи команды на измереиие АВД.
Иа фигурах приняты следующие обозначения: 1-1ВХОД диакретизатора; 2 - выход диСкретизатора; 5 - блок моделирования текущего значения аипроксимирующего полпиома; 4 - реверсивный счетчик для оиределеиия величины отклонения Промоделированного текущего значения аппроксимирующего тюлннома от текущего значения процесса; 5 - узел выдачи команды на измерение; 6 - блок управления; 7-15 - иепи управления и коммутации; 16 - реверсивный счетчиК для оиределеиия и заиоминания первой конечной разности; 17-блокПереписи лер.вой конечной разности; 18 - реверсивный счетчик для моделироваиия
полинома вида f ( )+ЕА/; /5-блок-переииси промоделированного значения аиироксимирующего .полинома; 20-геиератор тактовых импульсов; 21 - распределитель импульсов; 22 и 23 - ключи; 24 - счетчик с депшфратором; 25 - коммутатор; 26 - логическая цеиь 27 - триггер; 28 - логическая иеиь 29 - логическая цепь «И.
В качестве исходного .выражения, определиющего алгоритм работы данного АВД, использовано выражение вида
F(t)F() ,(1)
где F(t)-текущее значение процесса;
F()-значение процесса в начале участка ннтершолироваиия; 45 - уставка; Д/ -конечная разность первого лоряддвух тактов от начала участка интерполироваиия;
п - число тактов АВД на участке интерн олирова«ия.
В дальнейщем для того, чтобы максимально использовать однотииные узлы и элементы при реал1тзации устройства при моделироваипи члена nAf операция умножения заменяется операцией после.дозательного суммирования п раз значения (.
В результате этого операции решения алгоpiiTMa выполняются в устройстве главным образом О.ДИОТП1ИИЫМ узлом-счетчиком, а проверка равенства (1) осуществляется с помощью логических элементов (логические .цепи «ИЛИ, «И).
АВД .реализует алгоритм, выражение которого имеет вид (1), и структурная схема его приведена на фиг. 1. Ои состоит из блока моделироваиия 5, на входы которого подключены цени 7, 8, 9, а два его выхода 14 и 10 подключены на соответствующие входы реверсивного счетчика 4, причем иа третий .вход реверсивного :счетчика подключена цепь //. Кодовый выход ,15 реверсивного счетчика 4 соединен со входом узла 5 выдачи -команды на измерение, на другой вход которого подключена цепь 12. Выход узла выдачи команды на измерение .5 иодключеи цепью 13 ко входу блока моделирования 3 и входу блока управления 5, на другой ВХО.Д которого подключена исследуемач величина, а выходы блока управления явлг ;.:1тся цепями 7-.9, 11, 12, которые подключены соответственно ко входам блока моделирования, реверсивного счетчика и узла выдач команды иа измерение.
Для обеспечения работы устройства по заданному алгоритму использован блок уираалеипя 6, включающий в себя генератор та:ктовых импульсов 20, выход которого подключен на входы ключей 22 .и 23, причем выход ключа 22 -подан иа счетчик с дещифратором 24, имеющим четыре выхода, два из которых подключены ко входам коммутатора 25, один-«о входам ключей 23, 22 и один иодключен на логическую цепь «ИЛИ 26, имеющую выход, .под(люченный к 1выходу 9 блока управления 5, а на второй вход логической цепи «ИЛИ 26 иодключен одни из выходов триггера 27, который своим входом подключен к выходу ключа 23; второй же выход триггера 27 иодключен на ВЫХОД .12 блока уиравления и на третий вход коммутатора 25, четвертый вход которОго подключается ко входу блока управления, а выходы коммутатора 25 подключены к .выходам 7, 8 и // блока управления. Вход 13 блока уиравления соединен со входами тр.иггера 27 и счетчика с дешифратором 24.
Блок моделироваиия текущего значения процесса состоит из реверсивного счетчика 16, входы которого подключены ко входам 7, 8 блока моделирования 3, а выходы реверсивного счетчика 16 подключены на входы блока перешнси 17. Блок переписи 17 одним из своих входов подключен ко входу 9 блока моделирования 3, а выходы его поданы в реверсивный счетчик 18, блок оереписи 19 и на выход 10 блока моделирО вания 3. Реверсивный счет4HiK 18 своим входом подключен ко входу 8 блока моделирования 5, выходы же его -поданы на второй 1ВХОД блока переписи 19, -подключенного выходами к выходу J4 блока моделирования 3. Реверсивные счетчикп 16 и 18 имеют входы, которые подключены ко входу 13 блока моделирования 3. Узел сравнения и выдачи команды на измерение 5 предлагаемого АВД состоит из логической цепи «ИЛИ 28, соединенной входами со входом 15 узла выдачи команды на измерение 5, а выход ее подан «а один из входов логической цепи «И 29, другой вход которого подключен к входу 12 узла 5 выдачи команду на измерение, а выход логической цепи «И подключен к выходу 13 узла 5. Рассмотрим работу устрой-ства АВД (см. фиг. 1). В начале очередного участка интерполяции, которое определяется сбросом (выход 13), блок управления 6 подключает входную (величину F(t) на время одного такта по цепи 7 к реверсивному счетчику 16 блока моделирования 3. В следующем такте устройства АВД блок управления 6 подключает входную величину F(t) по цепи 8 к реверсивным счетчикам 16 и 18 блока моделирования 5, так что IB течение двух тактов в начале учасгка интерполирования в блоке моделированпя 5 на реверсивном счетчике 16 будет вычслеиа и запомнена первая конечная разность Д, а на реверсивном счетчике 18 запомнено значение процесса F(). Затем ло команде с блока управления (цепь 9, поступившей в блок переписи 17 блока моделирования 3, перекладывается Af в реверсивный счетчик 18, суммируясь алгебраически с заиомненным значением процесса, лри этом моделируется полиНОМ вида F(t(i)+1,. По сигналу конца переписи Af (цепь 10) запустится блок переписи 19, -при этом -промоделированное значеи;ие из реверсивного счетчика 18 блока моделирования 3 ;пербпиш ется в реверсивный счетчик 4, а из -промоделированного текущего значения аппроксимирующего Полииома вычитается текущее значение процесса, которое поступает по команде блока управления 6 на вход 11 реверсивного счетчика 4. Тем самым на реверсивном счетчике 4 определяется величина отклонения промоделпрованного текущего значения аппроксимирующего лолинома от текущего значения процесса. По 1команде с блока управления 6 (цепь 12) сравнивается величина отклонения, полученного на реверсивном счетчике 4, с уставкой. Эту задачу выполняют логические цепи «ИЛИ 28 и «И 29 узла выдачи команды на измерение 5. мирующего полинома от текущего значения процесса превзойдет 46„ (уставка), то АВД по цепи 13 1выдаст команду на измерепие и сигнал «сброс для устройства АВД, который nocTyniiT в блок управления 6 и в блок моделирования 5. При этом восстанавливается исходное состояние элементов устройства АВД. В случае, еслп велпчпиа отклонения меньше 4,г , тогда по команде с блока управления fi (цепь 9) блок переписи 17 блока моделирования 5 переложит еще AF в реверсивный счетчик /5, сбросится предыдущая велпчпна отклонения в peBepcHiBHOM счетч ке 4, а в него перепишется по команде с блока перелиси 17 (цепь 10) новое промоделированное значение. Из вновь записаиного значения в реверсивный счетчик 4 вычтется по команде с блока управления 6 текущее значение Процесса, посту пающее по цепи //. Полученное при этом новое отклонение сравнивается с уставкой 46, по команде, поступающей с блока управления по цепи 12 iB узел выдачп команды на измерение. Если величина отклонения меньще, чем 46,, то повторится -перепись AF в реверсивньГй счетчпк 18, а вновь промоделированное значение переппшется в реверсивный счетчик 4, который перед переписью будет сброщен на О командой, поступившей из блока переписи 17. Из вновь промоделированного значения вычтется текущее значение, а величина нового отклонения сравнится с уставкой 46„. Операции моделпровапия будут повторяться до тех пор, пока величина отклонения не нревзойдет уставки 46, . При этом появится команда на измерепие и сигнал сброса устройства АВД. После сброса работа элементов повтор1ггся: сначала будет определена AF, затем запомнена величина Г{11-1), промоделирована сумм f (ff-i) + 1. , проведено сравнение этой суммы с текущим значением F(i) и т. д. как описано выше. П р е д и е т изобретения 1. Адаптивный временпый диокретизатор. содержащий блок уиравлепия, блок моделирования аппроксимирующего полинома, реверсивный счетчик, узел выдачи команды на измерение, отличающийся тем, что, с целью расширения области прпмененпя устройства, в нем первые три выхода блока управления соед1шены с соответствующими входами блока моделирования аиироксимирующего полпнома, четвертый выход блока управления соединен с первым входом реверсивного счетчика, а пятый - со входом управления узла выдачи команды на измерепие, один вход блока управления служит входом дискретизатора, а другой его вход соединен с выходом узла выдачи .команды па пзмерение, подсоединенным также к четвертому входу блока моделирования аппроксимирующего иолипома и служащим выходом дискретизатора; первый выход блОКа моделирования аппроксимирующего
сивного счетчика,, а второй его выход соединен с третьим входом реверсивного счетчика; выход реверсивиого счетчи1ка соединеи со вторым входом узла выдачи команды на измерение.
2. Дискретизатор .по п. 1, отличающийся тем, что, в нем блок управления выполнен гв виде генератора тактовых импульсов, ключей, дешифратора, триггера, схемы «ИЛИ и коммутатора, лричем выход генератора актовых импульсов через ключи соединен соответственно с первым входом дешифратора и первым входом триггера, выходы триггера соединены соответствеино с .первым входом схемы «ИЛИ и лервым входом коммутатора, выходы дешифратора соединены соответственно со входами управления ключей, вторым входом схемы «ИЛИ и вторым и третьим входами коммутатора, первый, второй и третий выходы коммутатора служат соответственно первым, вторым и четвертым выходами блока управления, выход схемы «ИЛИ и выход триггера, соединенный с первым входом коммутатора, служат соответственно третьим и .пятым выходами блока управления, четвертый вход коммутатора и соединенные между собой вторые входы триггера и дешифратор.а служат соответственно первым и вторым входами блошка управления.
3.Дискретизатор но inn. 1 и 2, отличающийся тем, что в нем блок моделирования аппроксимирующего .полинома выполнен в виде реверсивных счетчиков и блоков переписи, иричем выход лервого счетчика соединен с первым ВХО.ДОМ одного блока иереписи, первый выход которого соединен с одним входом второго реверсивного счетчика, выход (Последнего соединен с одним входом второго блока переписи;
первый вход первого реверсивного счетчика служит первым входом блока моделирования ап1Проксимируюш,его лолинома, 1вторые входы счетчиков соединены между собой и служат вторым входом блока моделирования, вто.рой
вход .первого -блока переписи служит трегьим входом бло.ка моделирования, выход второго блока переписи служит лер1вым выходом блока моделирования аппроксимирующего полинома, второй выход первого блока переписи
соединен со вторым входом второго блока переписи и служит вторым выходо м блока моделирования.
4.Дискретизатор по пп. 1-3, отличающийся тем, что, в нем узел выдачи команды
на измерение выполнен в виде схем «ИЛИ и «И, причем выход схемы «ИЛИ соединен с одним входом схемы «И, второй вход которой служит входом управления узла, а выход- выходом узла, входы схемы «ИЛИ служат вторыми входами узла.
Команда на измерение 8
Фие I 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи телеметрической информации | 1980 |
|
SU877596A1 |
| Устройство для передачи телеинформации | 1980 |
|
SU877601A1 |
| Устройство для контроля параметров | 1979 |
|
SU842721A1 |
| Устройство для дискретного преобразования Фурье | 1984 |
|
SU1290348A1 |
| Устройство для решения систем линейных алгебраических уравнений | 1984 |
|
SU1187157A1 |
| Адаптивное телеизмерительное устройство | 1983 |
|
SU1133611A2 |
| Устройство для сжатия информации | 1986 |
|
SU1324047A1 |
| Многопроцессорная вычислительная система | 1982 |
|
SU1168960A1 |
| Устройство для определения гистограммы первой производной сигнала | 1972 |
|
SU439818A1 |
| Устройство для передачи телеизмерений | 1982 |
|
SU1020850A1 |
4
Т 1
P(t) 9
и д J I
12 Л 8 7
39
фуг. Z
Риг.З