Известны бесконтактные двигатели постоянного тока, содержащие ротор в виде постоянного магнита, статор с обмоткой, полупроводниковый коммутатор, управляемый индуктивным датчиком положения ротора, и центробежный регулятор скорости.
Предлагаемый двигатель отличается от известных тем, что с целью уменьшения габаритов часть магнитопровода датчика положения совмещена с подвижной частью центробежного регулятора скорости.
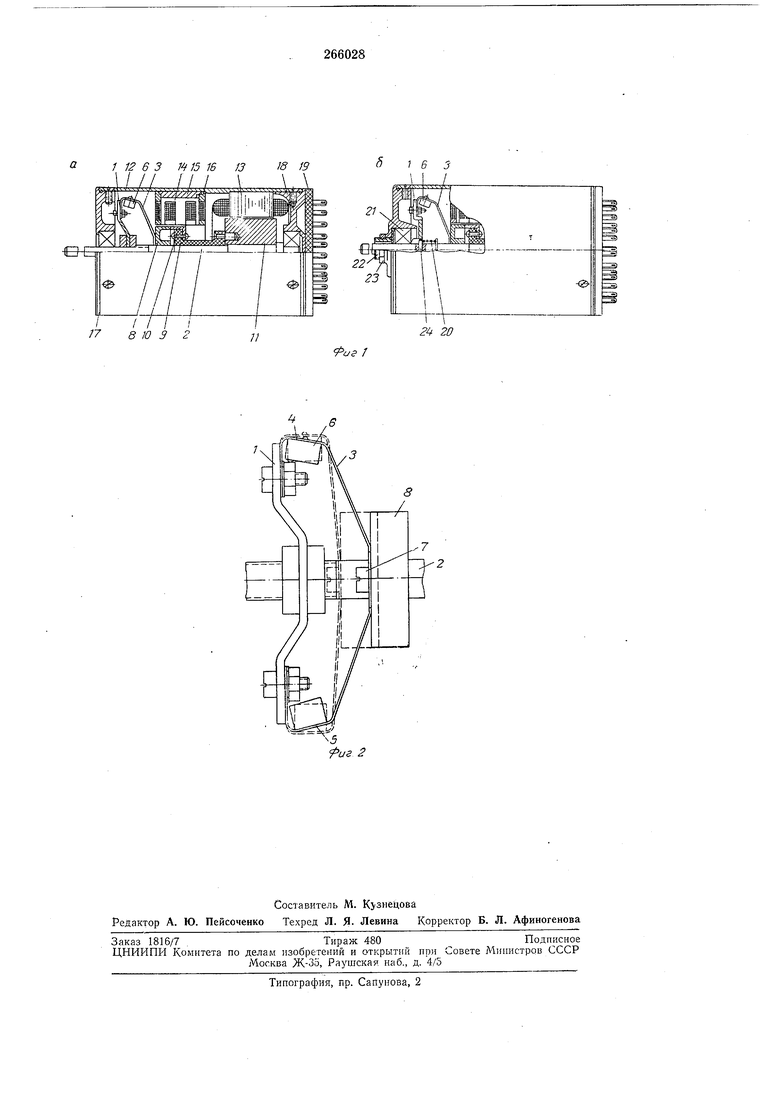
На фиг. 1, а и б показана схема описываемого двигателя; на фиг. 2 - центробежный регулятор скорости.
Центробежный регулятор скорости состоит из жесткой Пластины /, закрепленной гайками на валу 2, и упругого элемента в виде пружины 5. Пружина выполнена из листового материала и в сечении имеет вид дуги С-образной формы, симметричной относительно оси вала. Она изогнута так, что на концах образуются площадки 4 и 5, расположенные под углом или параллельно оси вращения вала. Для повыщения чувствительности регулятора скорости на этих площадках на максимальном удалении от оси вращения укреплены грузы 6. Центральная часть пружины посредством винтов 7 соединена с магнитопроводящим сердечником 8, имеющим возможность скользить по валу в осевом направлении, а ее свободные
концы прикреплены к пластине /. Благодаря симметричной конструкции пружины обеспечивается перемещение сердечника по валу без перекосов и облегчается балансировка подвижной системы двигателя. Для удобства балансировки упругий элемент может быть выполнен в виде звезды, представляющей собой совокупность любого числа пружин, подобных 3.
На валу также закреплены немагнитная втулка 9 с дугообразным якорем 10 датчика положения ротора и двухполюсный постоянный магнит 11, намагниченный по диаметру и являющийся ротором двигателя. Угловой размер дуги якоря зависит от числа ветвей обмотки статора и режима работы двигателя и в данном случае выбирается в пределах 120- 240°.
В корпусе 12 расположены статор 13 с обмоткой, состоящей из трех ветвей, включенных звездой, и датчик положения ротора, представляющий собой совокупность трех трансформаторов 14 с Ш-образными сердечниками, установленными по радиусам в обойме
15 под углом 120° друг к другу. Трансформаторы фиксируются в обойме при помощи крышек 16 и заливаются компаундом. Каждый трансформатор имеет три обмотки: две обмотки, включенные по дифференциальной схеме,
ся обмотками возбул ;дения, а третья - на среднем стержне, имеет средний вывод и является сигнальной обмоткой. Благодаря дие{)ференциальной схеме включения обмоток датчик положения может иметь релейную характеристику с большой кратностью изменения входного сигнала. С боков двигатель закрыт крышками /7 и У8 с установленными в них шарикопоашинниками, в которых можег вращаться вал двигателя. Концы обмоток трансформаторов и статора выведены на колодку 19..
У описываемого двигателя значение стабилизированной скорости определяется усилием натяжения пружины 5, величина которого зависит от положения пластины / на валу 2 и жесткости пружины. Таким образом, изменить значение стабилизированной скорости двигателя (фиг. 1,а) можно только после его остановки. Однако в некоторых случаях желательно изменять значение стабилизированной скорости двигателя в процессе эксплуатации, т. е. без остановки двигателя. Для этого двигатель (фиг. 1,6) дополнительно снабжен пружиной 20, имеющей большую жесткость чем пружина 5 и прил ;имающей пластину 1 к внутреннему кольцу шарикоподшипника 21, резьбовой втулкой 22, контргайкой 23 и щтифтом 24. Пластина имеет паз, в который входит щтифт, благодаря чему предотвращается ее поворот вокруг оси вала 2, а в осевом направлении пластина может свободно перемещаться по валу.
Двигатель работает следующим образом.
Когда якорь 10 находится под средним сердечником одного из трансформаторов, то по якорю и сердечнику 8 замыкается магнитный -ПОТОК левой обмотки, и в сигнальной обмотке этого трансформатора наводится э.д.с. максимальной величины. Если якорь за счет поворота вала 2 выйдет нз-под среднего сердечника трансформатора, то э.д.с., наводимая в сигнальной обмотке, будет минимальной величины.
При подключении питания двигатель разгоняется. Центробежные силы, возникающие при вращении грузов 6, стремятся переместить площадки 4 и 5 в положения, показанные пунктиром на фиг. 2, однако этому препятствуют упругие свойства пружины 3.
Разгон двигателя продолжается до определенной скорости, при которой составляющие центробежных сил вращающихся грузов центробежного регулятора скорости превышают натяг пружины 3. При этом магнитопроводящий сердечник 8 отходит влево от якоря 10, между ними возникает дополнительный воздушный зазор, т. е. уменьшается проводимость магнитных цепей трансформаторов 14
датчика положения. В результате этого резко уменьшаются си1иалы, снимаемые с трансформаторов, и силовые транзисторы отключают обмотки статора от питающей сети. Под действием мо.мепта па. валу скорость двигателя уменьшается, магнитопроводящий сердечник перемещается вправо, что вызывает увеличение проводимости магнитных цепей трансформаторов, обеспечивая появление сигналов на выходе датчика положения.
Установившимся режимом такой системы является автоколебательный режим, причем время включения и выключения двигателя определяется параметрами замкнутой системы двигатель - центробежный регулятор скорости - датчик положения ротора - коммутатор - двигатель, нагрузкой на валу и уровнем стабилизированной скорости.
Изменение значений стабилизированной скорости двигателя осуществляется следующим образом.
Поворотом втулки 22 (фиг. 1,6), передающий через щарикоподшинник 21 осевое перемещение пластине /. может меняться первоначальный натяг пружины 3, а следовательно,
и значение стабилизированной скорости двигателя. Контровка втулки осуществляется контргайкой 23.
Предмет изобретения
Бесконтактный двигатель постоянного тока, содержащий ротор в виде постоянного магнита, ста.тор с обмоткой,- полупроводниковый коммутатор, управляемый индуктивным датчиком положения ротора, и центробежный регулятор скорости, отличающийся j&u, что, с целью уменьшения габаритов, часть магнитопровода датчика положения совмещена с подвижной частью центробежного регулятора
скорости.
1 12 6 3 П15 16 19
III П 8 Ю 3
11
2 20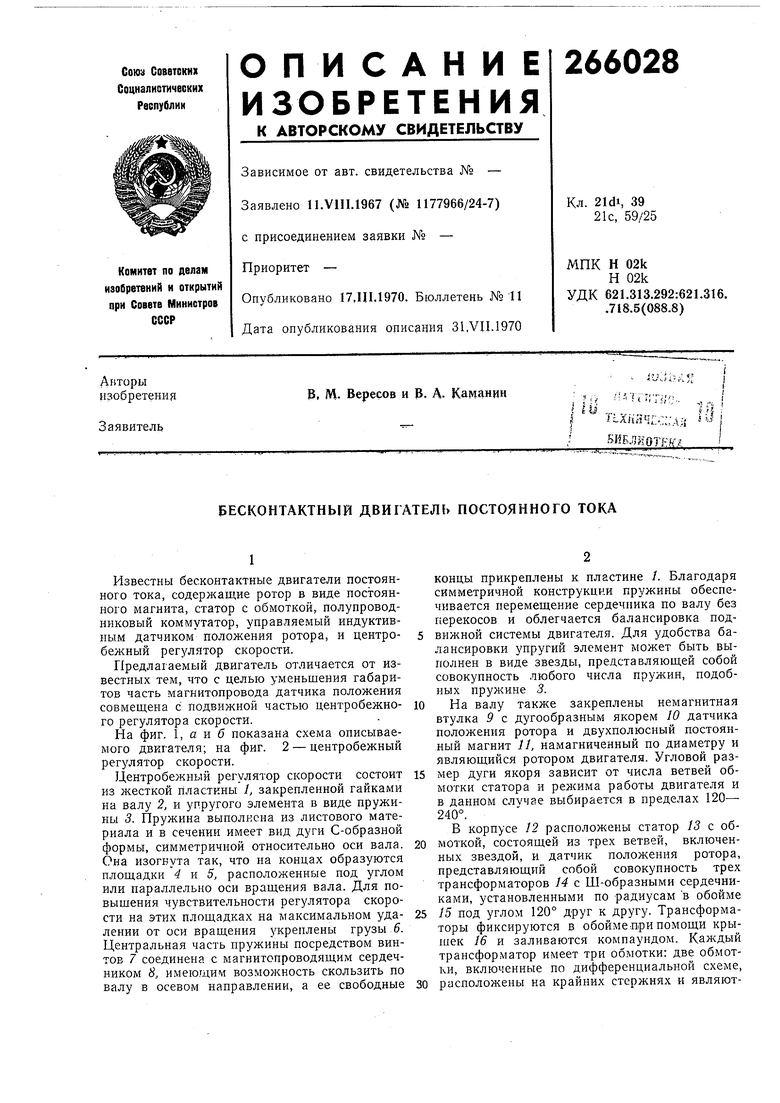
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1982 |
|
SU1095322A1 |
| Устройство для генерирования и регулирования фазы управляющих импульсов ионных преобразователей | 1957 |
|
SU114519A1 |
| Асинхронный электродвигатель | 1979 |
|
SU847451A1 |
| ТЯГОВАЯ СИСТЕМА ЭЛЕКТРОМОБИЛЯ | 2018 |
|
RU2696752C1 |
| Электромеханический преобразователь моментного вентильного электродвигателя | 1989 |
|
SU1702493A1 |
| ОБРАЩЕННАЯ СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2024 |
|
RU2829489C1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| Вентильный электродвигатель | 1989 |
|
SU1676020A1 |
| Вентильный электродвигатель с тахометрическим генератором | 1985 |
|
SU1419531A3 |
| Поворотный трансформаторный преобразователь | 1979 |
|
SU855751A1 |