Изобретение относится к устройствам автоматического направления движения сельскохозяйственных тракторов по траектории, заданной в виде рядка растений.
Известные устройства содержат копирующий растения электроконтактный щуп, сигнал от которого поступает к усилителям, воздействующим на сервопривод Направляющих колес трактора.
Испытания этих устройств на культивации nponaiuHbix культур показали, что в зависимости от микрорельефа ноля, степени искривленности рядков, длины пропусков, засоренности междурядий качество вождения автоматизированного трактора существенно изменяется.
В предложенном устройстве с целью улучщения качества автоматического вождения путем ограничения угла поворота направляющих колес оно снабжено индуктивным датчиКОМ угла поворота направляющих колес и схемой сравнения сигнала этого датчика с сигналом от щупа в виде сумматора на резисторах. Для регулирования угла, ограничивающего поворот направляющих колес, коэффициент передачи датчика угла поворота колес выполнен регзлируемым с помощью потенциометра.
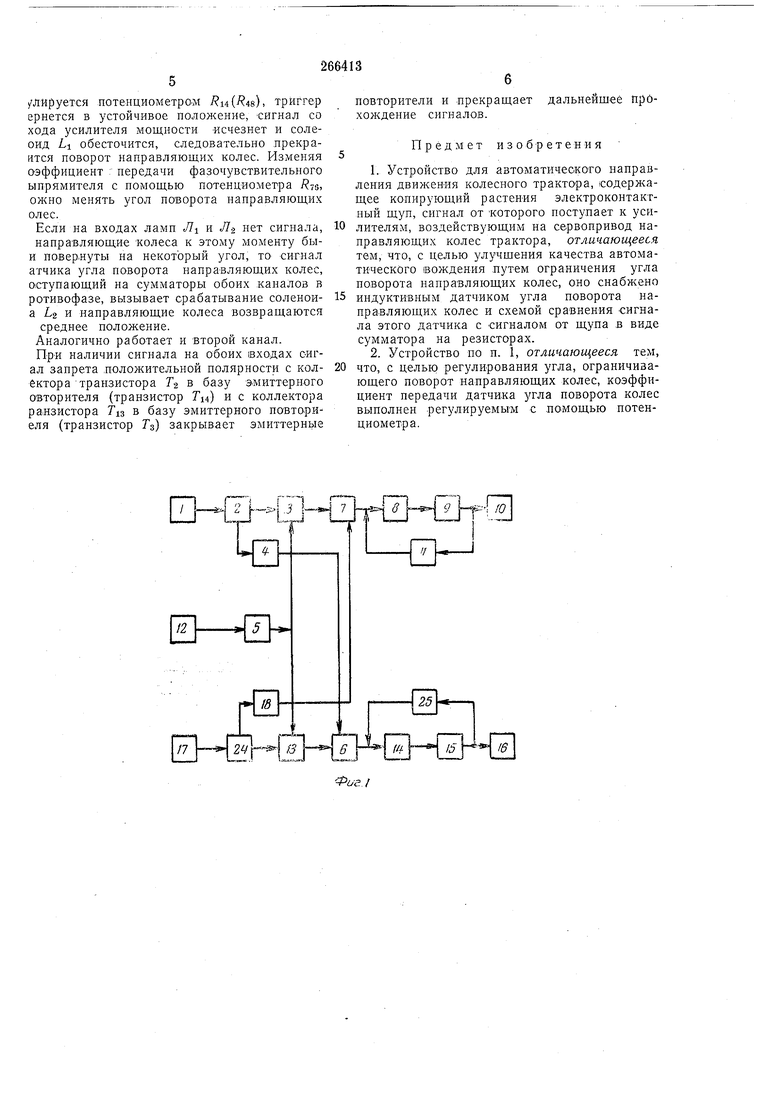
механизма с чувствительным элементом; на фиг. 3 - принципиальная схема устройства. Регулятор имеет два идентичных .канала регулирования правого и левого поворота.
Работа одного канала осуществляется следующим образом. Сигнал с электроконтактного щупа 1 (17) поступает на в.ход предварительного усилителя 2 (24). С его выхода усиленный сигнал ошибки подается на сумматор
3 (13) и на схему запрета 4 (18), исключающую одновременную работу каналов. На сумматоре 3 суммируется сигнал ошибки с предварительного усилителя и сигнал датчика угла поворота нанравляющих колес с фазочувствительного элемента 5. Сигнал запрета поступает на эмипггариый по(вторитель 6 niponnHBiOinoложного поворота, закрывая его. Сигнал с сумматора через эмиттерный повторитель 7 поступает на вход порогового устройства
8 (14), выходной сигнал которого усиливается усилителем мощности 9 (15) и приводит в действие исполнительный механизм 10 (16).
Для линеаризации характеристики регулятора нелинейный элемент (пороговое устройство) охвачен жесткой инерционной обратной СВЯЗЬЮ 11 (25).
поворота направляющих колес. Датчик угла поворота направляющих колес имеет механическую связь с направляющими колесами. Его выходной сигнал пропорционален углу новарота колес, а фаза зависит от знака угла поворота, т. е. вправо или влево.
Сигнал датчика, преобразованный фазочувствительным элементом 5, поступает на вход сумматора 3. Суммируясь с входным сигналом ощибки, он вызывает уменьщение амплитуды ВЫХОДНОГО сигнала сумматора.
При опрея;еле1Н НОА1 угле поворота колесвеличина силнала датчика такова, что уменьщает амплитуду выходного сигнала сумматора до величины, недостаточной для срабатывания порогового устройства. Выходной сигнал порогового устройства исчезает, и направляющие колеса остаются повернутыми на некоторый задаиный угол. Как только исчезает сигнал ошибки, т. е. щуп перестает касаться растения, колеса возвращаются в исходное состояние. Это происходит благодаря тому, что на входе сумматора 13 есть сигнал датчика угла поворота с фазочувствительного выпрямителя, а сигнал за1П р1ета одновремениой работы каналов снимается с исчезновением входного сигнала. Знак сигнала датчика угла поворота направляющих колес таков, что на выходе сумматора 13 .будет сигнал, который через элементы 6, 14 и 15 Вызовет срабатывание исполнительного механизма 16.
Таким образом, колеса возвращаются в среднее положение. Колебательный процесс устраняется выбором рабочей точки порогового устройства, а также введением лтесткой инерционной обратной связи.
Аналогично работает и второй канал.
При наличии сигналов на обоих входах (щупах) 1 и 17, схемы запрета 4 и 18 запрещают прохождение сигналов по рабочим ка|Налам.
Электроконтактный щуп 1 в изоляторе прикреплен к копирующему механизму 19. Копирующий механизм соединен с подвижной рамой 20 через щарнир 21 и удерживается в вертикальном положении пружинами 22, предназначенными для предотвращения поломки чувствительного элемента.
Подъем щупов датчика электропроводности в транспортное положение осуществляется гидроцилиндром 23. Подвижная рама копирующего механизма жестко укреплена на цапфе направляющих колес.
В исходном состоянии, когда электроконтактный щуп не касается растений, лампа Л открыта, т. е. через нее течет ток, так как потенциал сетки относительно катода равен нулю. Ток, протекающий через лампу Л и анодную нагрузку R-, .вызывает на Rz падение напряжения. Это напряжение, снимаемое с анодной нагрузки R-, через резистор з, поступает в базу транзистора TI, благодаря чему он находится в режиме насыщения и потенциал его коллектора близок к нулю. Коллектор транзистора TI соединен с базой транзистора TZ через резистор R, и, так как в базу транзистора Т подается смещение через резистор RI, он находится в режиме насыщения и потенциал его коллектора также близок к нулю. В таком же состоянии находятся и элементы второго канала Лз, , Т.
Таким образом, «а входе сумматора, собранного на резисторах j-Ru, сигналы отсутствуют, их нет и на выходе эмиттерного
повторителя (7з), и потенциальный триггер (транзисторы ) не возбужден. Значит на выход усилителя сигнал не поступает.
При касании растения щупом замыкается электрическая цепь: минус батареи смещения,
резистор R, масса - земля, растение - щуп, плюс батареи смещения. При этом падение напряжения на резисторе Ri запрет лампу JIi. Потенциал анода станет равным нулю, а транзистор TI будет заперт источником смещения.
Папряжение на коллекторе транзистора А станет примерно равным напряжению питания. Скачок коллекторного напряжения отрицательной полярности через резистор Rg подается на сумматор и через резистор R в базу
транзистора Га. Транзистор Т2 обратной проводимости закроется этим сигналом. Скачок напряжения положительной полярности на его коллекторе через резистор поступает в базу эмиттер.ного повторителя Тц другого канала и запирает его, запрещая одновременную работу каналов. С сумматора на резисторах 9-Rii через эммитерный повторитель (транзистор Гз), необходимый для согласования и усиления сигнала на мощности, сигнал подается на триггер Шмитта (транзисторы Гб), а с него на усилитель мощности (транзисторы 77 и Га), нагрузкой которого является соленоид LI. Для линеаризации регулятора ибЛИнейяый элемент - тригге|р Шмитта охвачен жесткой инерционной обратной связью, выполненной на транзисторах Тд-Гц. Глубина обратной связи регулируется потенциометром 32, а постоянная времени - переменным резистором 31При срабатывании соленоида LI гидрораспределителя колеса поворачиваются. Угол поворота колес фиксируется фазочувствительным датчиком, в качестве которого применен индуктивный датчик угловых перемещений,
включенный по балансной схеме.
Сигнал датчика выпрямляется фазочувствительным выпрямителем (диоды и трансформаторы Грз, Tps). На выходе фазочувствительного датчика стоит фильтр низких
частот, включающий «онденсаторы Сд, Сю, резисторы , .71, .72 и конденсаторы Сц, Cis и резисторы RIS, RU, . Сигнал с выхода фазочувствительного выпрямителя поступает на сумматоры обоих каналов в противофазе с основным сигналом. Поэтому, по мере увеличения угла поворота направляющих колес увеличивается сигнал датчика угла поворота, а амплитуда выходного сигнала сумматора уменьщается. Когда она станет меньще порога
/Лйруется потенциометром i4(48), триггер ернется в устойчивое положение, сигнал со хода усилителя мощности исчезнет и солеоид LI обесточится, следовательно прекраится поворот направляющих колес. Изменяя оэффициент : передачи фазочувствительного ыпрямителя с помощью потенциомегра , ожно менять угол поворота направляющих олес.
Если на входах ламп Л и Л- нет сигнала,
направляющие колеса к этому моменту быи повер.нуты на некоторый угол, то сигнал атчика угла поворота направляющих колес, оступающий на сумматоры обоих каналов в ротивофазе, вызывает срабатывание соленоиа La и направляющие колеса возвращаются среднее положение.
Аналогично работает и второй канал.
Пр« наличии сигнала на обоих 1входах сигал запрета .положительной полярности с колектора транзистора Т в базу эмиттерного овторителя (транзистор Г14) и с коллектора ранзистора Jis в базу эмиттерного повториеля (транзистор Гз) закрывает эмиттерные
повторители и прекращает дальнейшее прохождение сигналов.
Предмет изобретения
L Устройство для автоматического направления движен-ия колесного трактора, содержащее копирующий растения электроконтактный щун, сигнал от которого поступает к усилителям, воздействующим на сервопривод направляющих колес трактора, отличающееся тем, что, с целью улучшения качества автоматического вождения .путем ограничения угла поворота направляющих колес, оно снабжено индуктивным датчиком угла поворота направляющих колес и схемой сравнения сигнала этого датчика с сигналом от щула в виде сумматора на резисторах.
2. Устройство по п. 1, отличающееся тем, что, с целью регулирования угла, ограничивающего поворот направляющих колес, коэффициент передачи датчика угла поворота колес выполнен регулируемым с .помощью потенциометра.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 1971 |
|
SU312559A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ КОЛЕСНОЙ МАШИНЫ | 1969 |
|
SU249110A1 |
| Устройство для автоматического вождения тракторного агрегата на виноградниках | 1980 |
|
SU923396A1 |
| УСТРОЙСТВО СИГНАЛИЗАЦИИ К МАШИНАМ ДЛЯ ОБРАБОТКИ РАСТЕНИЙВСЕСЮЮЗНЛЯАТЕЙ1НО-Ш1?11'
1г--, ,- -)
- 2 1-.3 IJ U,™j
с i-е
2/
Фиг. 2
