Изобретение относится к системам автоматического направления движения сельскохозяйственных тракторных агрегатов по траектории, заданной в виде рядка растений, следа маркера и др.
Известные устройства содержат датчики положения и угла новорота направляющих колес, электронный блок с внутренней обратной связью и сервопривод.
В предложенном устройстве с целью обеспечения требуемого качества автоматического направления движеппя на «полях с поперечным уклоном ил1еется электрическая обратная связь по положению рабочих оргапов культиватора отпосительпо заданной траектории, выходной сигнал которой, суммируясь па резисторах последовательно с сигналом датчика угла поворота паправляюш,пх колес, вызывает смендепие его электрического пуля и, соответственно, поворот панравляющих колес па некоторый регулируемый угол, являюпдийся иовым пулевым иоложением направляющих колес, относительно которого отрабатываются сигиалы ошибки.
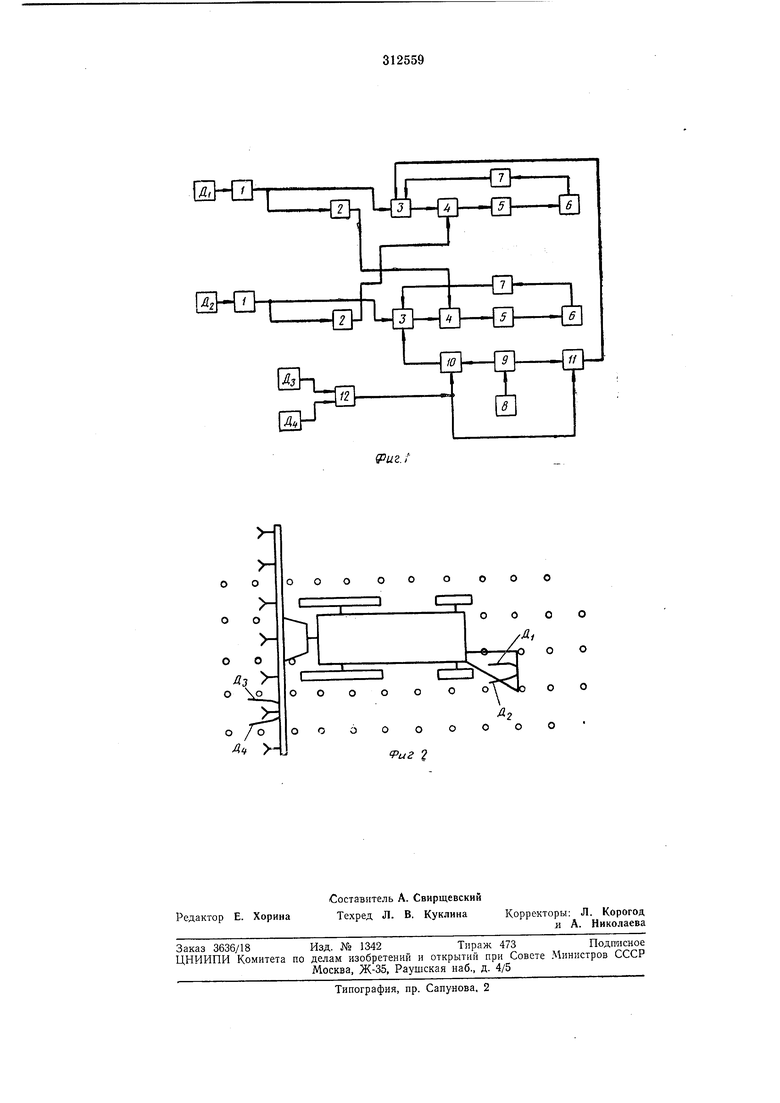
На фнг. 1 изображена блок-схема устройства; на фнг. 2 - схема установки датчиков положения па копирующем механизме и на культиваторе.
Электронный регулятор имеет два идентичных канала управления - правого и левого поворота, каждый из которых состоит из следующих элементов: электронного усилителя 1,
сигнала ощибки, схемы занрета работы противоположного канала 2, сумматора 3 на резисторах, релейного элемента 4, усилнтеля мощности 5, исполнительного электромагнита 6 и виутренней отр1п;ательпой обратной связи 7.
Общими элементами для двух каналов управлепия являются датчик угла поворота направляющих колес 5, имеющий механическую связь с колесами, фазочувствнтельиый детектор 9, сумматоры 10 и // и обратная связь по
положению рабочпх оргапов культиватора 12. При отклоиеини исредней точки трактора от заданной траекторнн сигнал ощибки с датчика Д (Ду) ноступает на вход электронного уснлнтеля /, а с его выхода на сумматор 3 и
па схему занрета одновременной работы каналов 2.
С сумматора 3 сигнал подается на вход иорогового устройства - релейный элемент. И а него же воздействует сигнал со схемы запрета 2 работы протнвоположного капала, запреплающий срабатывапие релейпого элемента прн наличнп С 1гпала от датчика Д2 второго каиала.
сервопривода и, следовательно, поворот колес.
Направляющие колеса имеют механическую связь с датчиком отрицательной обратной связи по положению направляющих колес. Его вы.ходной сигнал пропорционален углу поворота колес, фаза зависит от знака угла поворота, т. е. вправо или влево.
Сигнал датчика угла поворота, преобразованный фазочувствительным элементом 9, через сумматор 11, поступая па сумматор 3 и суммируясь с сигналом ошибки, уменьшает амплитуду его выходного сигнала.
При определенном угле иоворота направляющих колес сигнал сумматора 3 уменьшается до величины, меньшей порога отпускания релейного элемента 4, и колеса остаются повернутыми на задаиный угол. Как только сигнал ошибки исчезнет, колеса возвращаются в исходное состояние, так как на вход су.мматора 5 через сумматор 10 поступает сигпал датчика угла поворота (сигнал запрета одновременной работы каналов отсутствует), который через эле.менты 4 и 5 вызывает срабатывание электромагнита 6 сервопривода. Таким образом, колеса возвращаются в нулевое полол ;ение (движение прямо).
Для линеаризации характеристики регулятора, нелинейный элемент 4 охвачен жесткой инерционной отрицательной обратной связью 7.
Аналогично работает и второй канал.
При наличии сигналов как от правого, так и от левого датчиков идентичные схемы запрета исключают возможность прохождения сигнала по рабочим каналам.
Кроме обратной связи по положению направляющих колес в регулятор введена корректирующая обратная связь по положению рабочих органов сельскохозяйственного орудия 12.
Функция данной обратной связи заключается в смещении электрического нуля датчика угла поворота направляющих колес путем последовательного суммирования их сигналов на сумматорах 10 и /), вызывающих поворот колес на определенный угол для предотвращения «сползания агрегата и подрезания растений при работе на нолях, имеющих поперечные уклоны.
Смещение рабочих органов относительно рядка растений, следа маркера и других видов заданной траектории фиксируется датчиками положепия Дз, Д, установленными на рабочем орудии.
Выходной сигнал контура обратной связи по положению рабочих органов культиватора подается на сумматоры 10 я 11 ъ противофазе с полярностью, соответствующей направлению смещения рабочего орудия. Например, при смещении вправо на сумматор 10 поступает сигнал отрицательной полярности, а на 11 - ноложительной.
При нулеъом положении колес и паличии сигнала с обратной связи 12 амплитуда сигнала, поступающего с сумматора W, И на сумматор 3 канала поворота максимальная, так как сигнал датчика угла поворота в этот момент равен нулю. Сигнал ошибки через элементы 5-5, вызывает срабатывание электромагнита 6. Колеса поворачиваются, сигнал датчика угла поворота увеличивается и, суммируясь в противофазе с сигналом обратной связи 12 на сумматорах 10 и 11, уменьшает дисбаланс. При суммарном сигнале с сумматоров 10, 11, меньшем порога отпускания релейного элемента 4, поворот колес прекращается и они остаются повернутыми на заданный угол. Этот угол поворота направляющих колес - новое нулевое положение колес, относительно которого они будут поворачиваться при наличии сигналов ошибки от передних датчиков. Когда сигнал ошибки со входа обратной связи 12 исчезнет, его выходной сигнал снимается через некоторое регулируемое время в зависимости от величины угла склона, скорости движения, состояния
почвы и т. д.
При исчезновении.сигнала с обратной связи 12, колеса возвращаются в прежнее нулевое положение нескомненсированным сигналом датчика угла поворота аналогично описанному выше при снятии сигнала ошибки со входа канала поворота.
Таким образом, при отклонении рабочих органов от заданной траектории (из-за уклонов или других причин) за счет иоворота передних колес создается компенсирующий поворачивающий .момент, обеспечивающий движение агрегата на заданной траектории.
Предмет изобретения
Устройство авто.матического направления движения колесного трактора, например, с
культиватором, содержащее датчики полол ения и угла поворота направляющих колес, электронный блок с внутренней обратной связью и сервопривод, отличающееся тем, что, с целью обеспечения требуемого качества автоматического направления движения на полях с поперечными уклонами, устройство снабжено электрической обратной связью по положению рабочих органов культиватора относительно заданной траектории, выходной сигнал
которой, суммируясь на резисторах последовательно с сигналом датчика угла поворота направляющих колес, вызывает смещение его электрического нуля и, соответственно, поворот направляющих колес на некоторый регулируемый угол, являющийся новым нулевым положепием направляющих колес, относительно которого отрабатываются сигналы ошибки.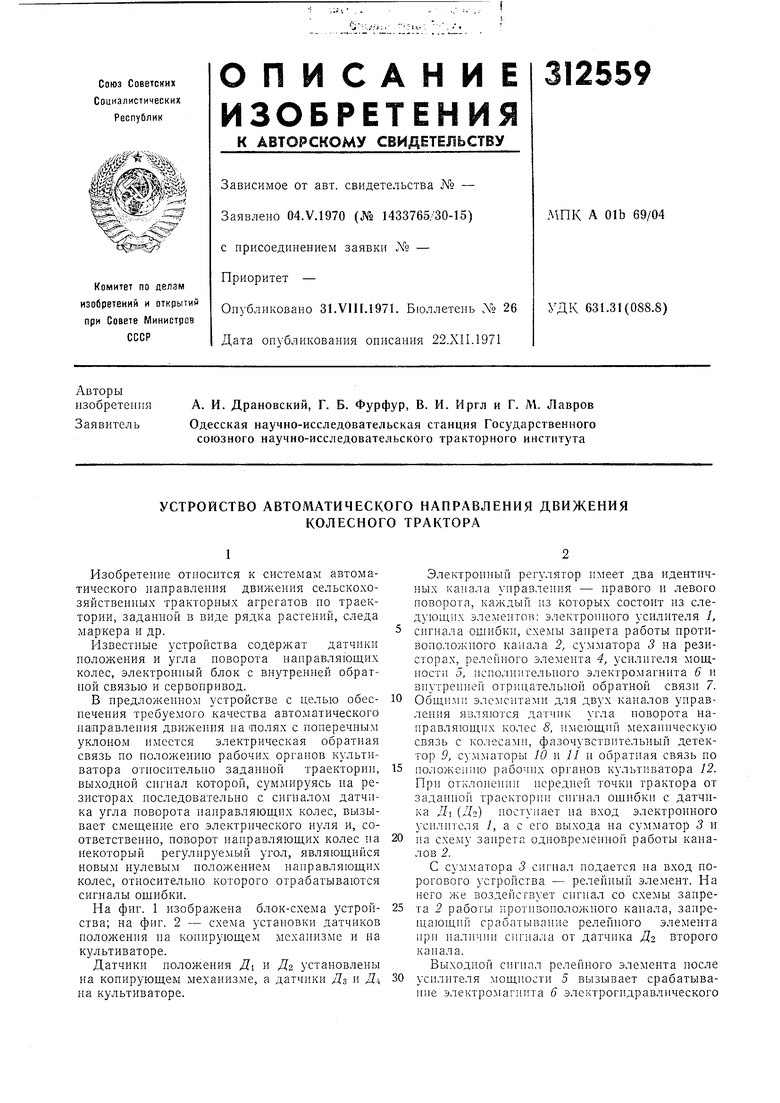
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1970 |
|
SU266413A1 |
| аСЕС©Юч1НАЯ | 1973 |
|
SU367198A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МОБИЛЬНЫХ АГРЕГАТОВ | 2001 |
|
RU2224396C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙПРОДОЛЬНО-ПОПЕРЕЧНОЙ СТАБИЛИЗАЦИИПОЛОЖЕНИЯ РАБОЧИХ ОРГАНОВ12 | 1971 |
|
SU426614A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ КОЛЕСНОЙ МАШИНЫ | 1969 |
|
SU249110A1 |
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ ЗЕМЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814305C1 |
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| Система автоматического управления траекторным движением транспортного средства с функцией курсовой устойчивости | 2019 |
|
RU2724008C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| Способ автоматического вождения колесного трактора и устройство для его осуществления | 1984 |
|
SU1311641A1 |