Пзобретение относится к области автоматизации управления сельскохозяйственными агрегатами нри проведении технологических сельскохозяйственных операций, связанных с движением агрегата но зависимым траекториям (сев, нахота, культивация и так далее).
Для автоматизации агрегатов применялись устройства, содержащие чувствительный и преобразующие элементы и исполнительные механизмы.
Целью изобретения является устранение автоколебаний с новышением скоростн движения, а также увеличение демпфирующих свойств объекта управления и сглаживание искривлений при копировании задающих траекторий.
Достигается это тем, что устройство снабжено датчиком ускорения, установленным в центре тяжести самоходной машины, и инерционным интегрирующим звеном, выполненным на основе пассивной RC-цепочки и отражающим инерционные свойства самоходной мащины.
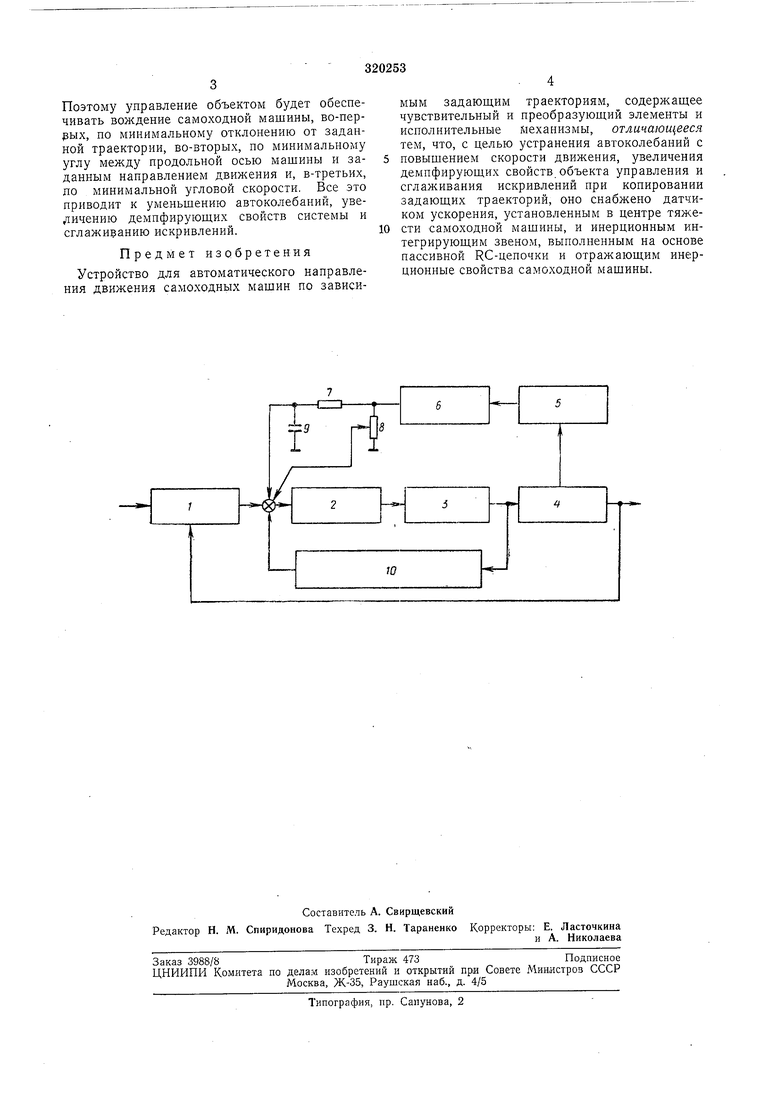
На чертеже изображена структурная схема предлагаемого устройства для автоматического направления движения самоходных мащин по зависимым задающим траекториям.
ходной мащины 4 установлен датчик 5 ускорений. Элементы 2, 3, 4 охвачены обратной интегрирующей связью на усилителе 6, на выходе которого включены резисторы 7, S и емкость 9. Параллельно преобразователю 2 сигналов и исполнительному механизму 5 включена обратная жесткая инерционная внутренняя связь 10.
При отклонении самоходной машины от задающей линии на выходе чувствительного элемента / появляется снгнал, который через сумматор преобразующего устройства и исполнительный механизм поворачивает объект
в сторону уменьшения ошибки. Как только мащина начинает поворачиваться, на выходе датчика 5 ускорения появляется сигнал, пропорциональный скорости движения машины и угловой скорости отклонения. Сигнал с датчика ускорения усиливается усилителем 6 и .через пассивную интегрирующую цепочку на резисторе 7 и емкости 9 поступает на сумматор преобразователя. Этот сигнал пропорционален скорости двилсення и углу между
.продольной осью машины и осью заданного направлення движения. Одновременно через усилительное звено и делитель 8 на вход сумматора преобразующего устройства подается сигнал, пропорциональный первой производПоэтому управление объектом будет обеспечивать вождение самоходной машины, во-перрых, по минимальному отклонению от заданной траектории, во-вторых, по минимальному углу между продольной осью машины и заданным направлением движения и, в-третьих, по минимальной угловой скорости. Все это приводит к уменьшению автоколебаний, увеличению демпфируюш,их свойств системы и сглаживанию искривлений.
Предмет изобретения
Устройство для автоматического направления движения самоходных машин по зависимым задающим траекториям, содержащее чувствительный и преобразующий элементы и исполнительные механизмы, отличающееся тем, что, с целью устранения автоколебаний с
повышением скорости движения, увеличения демпфирующих свойств объекта управления и сглаживания искривлений при копировании задающих траекторий, оно снабжено датчиком ускорения, установленным в центре тяжести самоходной машины, и инерционным интегрируюшим звеном, выполненным на основе пассивной RC-цепочки и отражающим инерционные свойства самоходной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВНУТРЕННЕЙ КОРРЕКТИРУЮЩЕЙ СВЯЗИ | 1971 |
|
SU317357A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ КОЛЕСНОЙ МАШИНЫ | 1969 |
|
SU249110A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1970 |
|
SU266413A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 1971 |
|
SU312559A1 |
| ШИРОКОПОЛОСНЫЙ АКСЕЛЕРОМЕТР | 1970 |
|
SU262525A1 |
| Устройство для автоматического вождения самоходных агрегатов | 1972 |
|
SU436630A1 |
| Устройство для виброзащиты сиденья транспортного средства | 1983 |
|
SU1124266A1 |
| УНИВЕРСАЛЬНАЯ ЦИФРОВАЯ УПРАВЛЯЮЩАЯ МАШИНА | 1965 |
|
SU170218A1 |
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ, НАПРИМЕР, СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1967 |
|
SU195166A1 |
