В области автоматизацпи ироизводствеиных процессов применяются устройства для проверки статической и динамической ошибки дистанционной цередатц, содержаи1,ей индикаторные сельсин-датчик и сельсии-ириемиг.к.
Описываемое устройство отличается от известных тем, что оно содержит индукциолиый датчик угла, ротор которого связан с ротором сельсина-датчика, а статор - с ротором сельсина-приемника, причем сельсин-датчик и сельсин-приемник установлены на соосных кронштейнах, а выход индукционного датчика связан с фазочувствительным иидикаторолг.
Это позволяет повысить точность и обеспечить автоматизацию проверки.
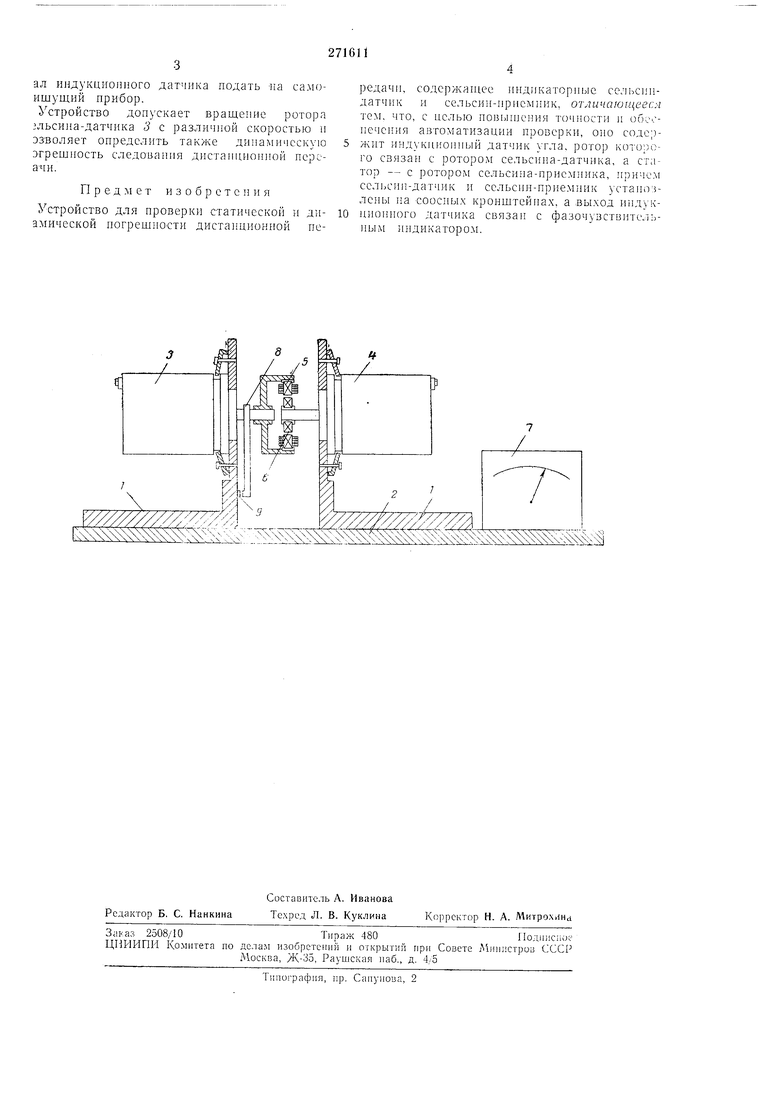
На чертеже изображена конструктивная схема описываемого устройства.
Устройство содержит кронштейны /, расположеииые на плите 2 и имеющие соосные отверстия, в которые устанавливаются сельсин-датчик 3 и сельсин-ириемник 4. Ра сстояние между кропштейнами выбрано таким, чтобы обеспечивалось необходимое перекрытие лгежду посаженным на ось сельсина-датчика статором 5 линейного индукционного датчика угла и посаженным на ось сельсина-ириемпика ротором 6 этого датчика. Выходная обмотка индукционного датчика угла подключена к фазочувствительному индикатору 7, в качестве которого могут быть использованы, например, фазочувствительный выпрямитель и а: перметр, отградуированный в угловых велим иах. На оси сельсииа-датчика 3 закрепле; стрелка 8, а на кронштейне - индекс 9, позв
ляюшие фиксировать поворот ротора на 360
Нроверка погрснпюсти следования с и
моп1:ью описываемого устройства производи
ся следующим образом.
Нсходтюе (согласованное) нололхенцс д
станционной иередачи совмещается с нул. фазочувствительного индикатора 7. Нри этс стрелка 8 на роторе ссльснна-датчнка 3 совм щается с иидексом 9. При повороте pOTOj сельсина-датчика 3 и одновременном поворо
статора 5 индукцион-ного датчика синхроииз руюн1нй Момент, возникающий на оси рото сельсина-ириемника 4, будет поворачиват ротор 6 индукционного датчика в ту ст рону на угол, отличающийся от угла поворо
ротора сельснна-датчика 3 на величину угл вой погрешности следования сельсииа-ирие ника 4. Таки образом, угол поворота л нейпого индукционного датчика равен вел чине угловой погрешности следования, а ciнал, поступающий на вход фазочувствител иого индикатора 7, пропорционален этой в личине.
ал индукционного датчика подать на са.моишущий прибор.
Устройство допускает вращение ротора зльсина-датчика 3 с различной скоростью и эзволяет определить также динамическую этрешиость следования дистанционной нереачи.
Предмет изобретения
Устройство для проверки статической н диамичеекой погрешности дистанционной иередачн, содержащее ииднкаторные еельсиндатчнк и сельсин-приемник, отличающееся тем, что, с целью поБьинения точности н обеонечения автоматизации проверки, оно содержит индукционный датчик угла, ротор которого связан с ротором сельсина-датчика, а статор - с ротором сельсина-приемника, причем сельсин-датчик и сельсии-приемник устаиозлсиы на соосных кронштейнах, а выход индукционного датчика связан с фазочувств1ггельиым индикатором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля сельсин-приемников | 1973 |
|
SU456258A1 |
| Схема включения двух сдвоенных бескон-ТАКТНыХ СЕльСиНОВ | 1979 |
|
SU828201A1 |
| Система управления | 1981 |
|
SU962843A1 |
| Устройство для дистанционной передачи угловых перемещений | 1987 |
|
SU1424046A1 |
| Анемометр сигнальный | 1975 |
|
SU558215A2 |
| Устройство для измерения угла закручивания бурильной колонны | 1982 |
|
SU1078037A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ ОШИБОК СЕЛЬСИНОВ-ПРИЕМНИКОВ | 1973 |
|
SU368589A1 |
| Устройство для измерения курса подземного объекта | 1973 |
|
SU446637A1 |
| Устройство для дистанционной установки нулевого положения сельсинной передачи | 1983 |
|
SU1103278A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИНТЕГРАТОР | 1967 |
|
SU194426A1 |
