1
Изоб|)ете11ие относится к области измерения курса движеиня подземных объектов, и может иайти применеиие для измереиия азимутальиых углов буровых скважин и определения в них граи-иц апомальиых зон.
Изиестиые устройства для измерения курса движения нодземного объекта содержат магнитны датчик, фазовые ус.ияители, иреобразслатель и регистратор. Однако они не исключают погрешности 11.1 иокадан1 н poriicTpiipyiouicго а;;нмутг1, позни-каюшис от воздсмютвия случа1П1ы магнитных полей.
В предлагаемом устройстве с цеЛью исключения погрешностей из по казаний регистрирующего блока азимута магнитный датчик выполнен в Ш1де индукционного треугольника, нодключен.иого через фазовые усилители к двум иараллельиым сельсин-приемиикам, роторы которых один от.поснтелыш другого на 90° и жестко закреплены на оси, подключенной через редуктор к исполнительному двигателю, связанному с роторной об :jTKoA одного из сельсинов, при этом роторная обмотка другого сельсина подключена к индикагору.
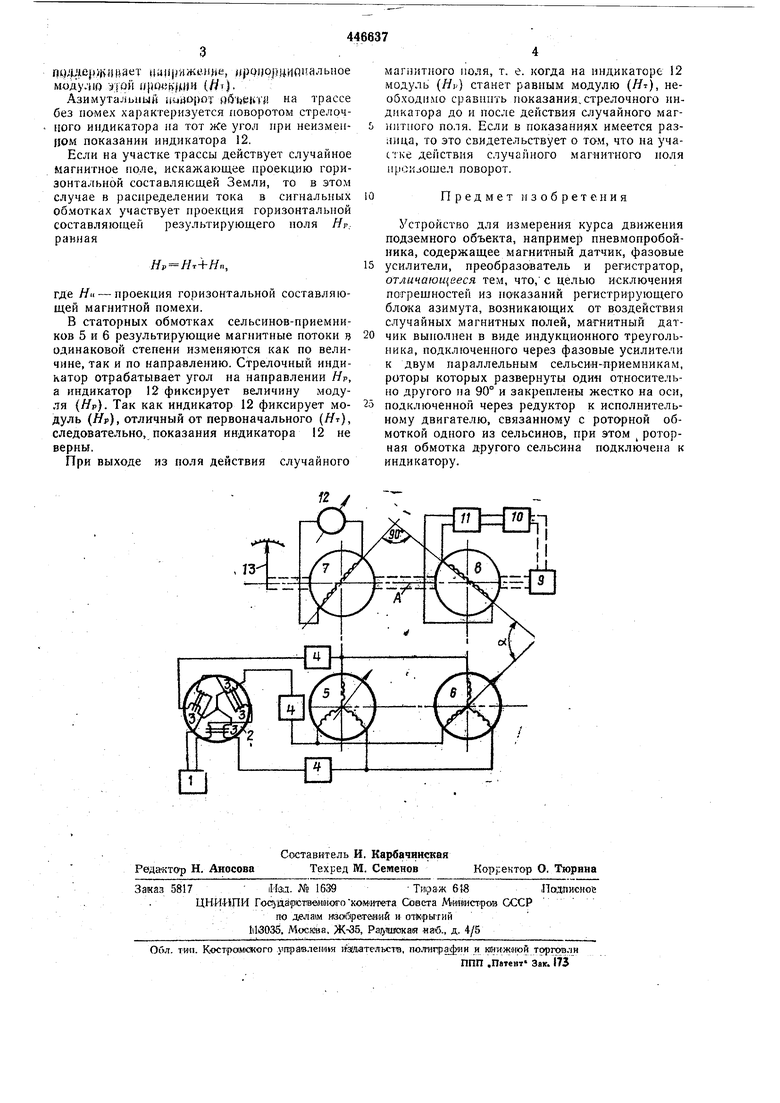
На чертеже представлена электрическая блок-схема описываемого устройства.
Устройство состоит из генератора 1 возбуждення, индукционного треугольника 2, который сигнальными обмотками 3 через фазовые усилители 4 подключен к двум параллельным сельслнам-приемпикам 5 и 6. Роторы 7 и 8 сельсинов-приемников развернуты один относительно другого на 90° и закреплены жестко на оси А, подсоединенной посредством редуктора 9 к исполнительному двигателю 10. Ротор 8 подключен к входу усилителя 11. Ротор 7 подключен к индикатору 12. На сх;и Д закреплена стрелка 13.
Работает устройство следующим образом. На прямолинейном участке трассы, на которо.м отсутствуют случайные магнитные ноля, напряженне сигнальных обмоток индукциониого треугольника пО экранированному кабелю через фазовые усилители поступает на параллельно включенные статоры двух сельс; нов-приемников 5 и 6. Результи)ующне маг1гнтные потихн сгато)оп сельспнон-нрнс.мннко Ф/5 н Ф/6 имеют одно направление, определяемое распределением токов в сигнальных обмотках 3 индукционного треугольника.
С ротора 8 напряжение подают иа вход уси. ителя 11 следящей системы, исполнительный двигатель которой через редуктор 9 поворачивает ротор 8 в согласованное положение, соответствующее углу 90°. Так как роторы закреплены па одной оси со сдвигом на 90°, то стрелочиый индикатор характеризует направлеппе проекции Ят, а индикатор 12 ротора 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения курса движения подземного объекта | 1977 |
|
SU734402A2 |
| Феррозондовый компас | 1983 |
|
SU1081417A1 |
| Устройство для контроля точности индукционных датчиков магнитного курса | 1983 |
|
SU1210059A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ ВЕКТОРА МАГНИТНОГО ПОЛЯ ЗЕМЛИ В БУКСИРУЕМОЙ ГОНДОЛЕ | 1973 |
|
SU409176A1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ФУНКЦИИ ПОГРЕШНОСТИ | 1973 |
|
SU408364A1 |
| УСТРОЙСТВО ГРУППОВОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ НА ШИНАХ ЭЛЕКТРОСТАНЦИИВСЕСОЮЗНАЯ | 1971 |
|
SU316170A1 |
| Устройство для проверки точности индукционных компасов | 1980 |
|
SU901819A1 |
