Известен механизм подачи нити для трикотажных мак1ин, содержащий вариатор скорости, связывающий главный вал привода машины с валом навоя, электродвигатель, служащий для перемещения конуса вариатора, датчик натяжения нити, контролирующий положение скало. При изменении 1атяжения нитей основы датчик выдает разнополярный снгнал, который отрабатывается электродвигателем, изменяющим положение кольца вариатора, При этом меняется передаточное отношение от главного вала привода иетлеобразующих органов к валу навоя и, таким образом, сохраняется постоянное натяжение нитей основы.
Этот механизм не обеспечивает постоянство натяжения нитей при больших рассогласованиях, например, при перезаправках машин. Кроме того, отсутствует возможность влияния на динамику подачи нити при пуске и остановке машины, что приводит к ухудшен}по качества вырабатываемого материала.
Предлагаемый механизм уменьшает статическую ошибку регулирования при больших рассогласовапиях, поддерживает постоянным натяжение нити на всех режимах работы машины. Это достигается тем, что в механизме применен дополннтельный контур регулирования, состоящий из датчика диаметра навоя и датчика обратной связн.
Для увеличения точности и быстродействия регулирования натяжения нитей основы югyт быть нрименены индуктивный датчик натяжения нитей и реверсивная схема унравлсния асинхронным двнгателем.
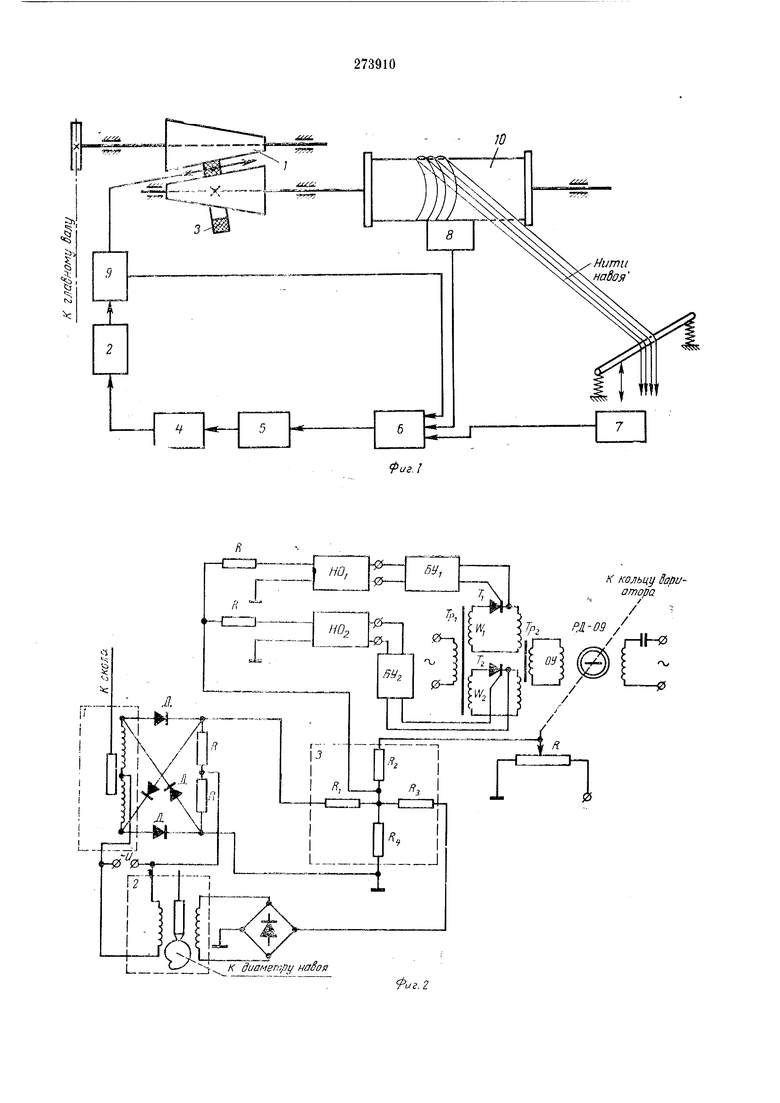
На фиг. 1 показана блок-схема предложенного механизма; на фиг. 2 - электрическая схема управления механизмом.
Механизм нодачн инти содержит вариатор 1, связывающий вал навоя с главным валом машины, асинхронны электродвигатель 2, приводяшпй в движение кольцо 3 вариатора скорости, усилитель 4 мощностн, днскрнминатор 5, сумматор б, нндуктнвньп датчик 7 патяжения нити, датчик 8 диа.метра навоя, датчик 9 обратной связн, унравляюнднй ноложением кольца вариатора.
Работает механизм следуюипш образом.
На в.ход сум.матора 6 иодаются напряжения, нропорцнональные среднему отклонению натяження нитей от заданного, выдаваемые нндуктнвным датчнком 7, напряжение, функц 1онально связанное с изменением диаметра навоя 10, выдаваемое датчиком 8, и напряженно обратной связн, снимаемое с поте11цномет 1Нческого датчнка 9, жестко связанного с ва.юм двнгателя 2.
равляет усилителем 4 мощности. Напряжение с усилителя мощности подается на обмотку управления асинхронного иснолнительного электродвигателя 2.
В данной схеме регулирования нодачи нити осуществляется комбинированный нринцнп регулирования: но возмущению {изменение диаметра навоя), чем обеснечивается грубое регулирование натяжения нитей, и по отклонению (изме)1ение натяжения нитей), чем обеспечивается точное регулирование натяжения нитей. Регулированием но возмущению осуществляется грубое поддержание постоянства натяжения нитей путем измерения величины возмущения датчиком 8 и выработки унравляющего сигнала на регулятор. Отработанный регулятором управляющий сигнал комненсирует возникшее возмуЕ;ающее воздействие. Точное -ноддержанне натяжения нитей на заданном уровне осуществляется с помощью добавочного ввода в сумматор 6 информации об отклонении натяжения нитей от заданного посредством индуктивного датчика 7. Благодаря применению принципа комбинированного регулирования улучшается качество регулирования.
Реверс вращения вала электродвигателя 2 (РД-09) обеспечивается изменением направления тока в обмотке управлення (ОУ) посредством усилителя мощности. Усилитель мощности состоит из силового трансформатора Tpi, обмотки Wi и Wz которого через управляющие тиристоры TI и TS иитают входные обмотки трансформатора Тр2 таким образом, что при включении тиристора TI вал двигателя РД-09 перемещает кольцо вариатора в одну сторону, а нри включении тиристора Т2 - в обратную, что соответствует изменению скорости вран1ения навоя и соответственно изменению натяжения нитей основы.
Фазочувствительный блок управления включает два идентичных канала, служащих для
управления тиристорами Т и TZ. Срабатывание того или иного канала определяется знаком сигнала ошибки системы, поступающего с сумматора. Каждый из каналов управления включает в себя нуль-орган (HOi п Н02) и блок управления (БУ и БУ2). В блок управления входит согласующий эмиттерный повторитель. В данном механизме подачи сложение сигналов происходит в сумматоре 6, собранном на резисторах Ri-R,,.
Грубое регулироваиие натяжения нитей осуществляется с номощыо датчика 8, измеряющего изменение диаметра навоя 10. Напряжение датчика 8 сравнивается в сумматоре с напряжением обратной связи, снимаемым с датчика 9, связанного с кольцом вариатора. Напряжение разбаланса отрабатывается фазочувствительной системой управления. Точное регулирование напряжения нитей осуществляется с помощью индуктивиого датчика 7 напряжения, связанного с положением скало, напряжение которого выирямляется фазочувствительным демодулятором и подается на сумматор, где складывается с нанряжением
разбаланса грубого канала.
Предмет изобретения
1.Механизм подачи нити для трикотажных машин, включающий вариатор скорости, электродвигатель для неремещения конуса вариатора, датчик натяжения нити, отличающийся тем, что, с целью уменьшения статической ошибки регулирования нри больших рассогласованиях, применен дополнительный контур регулирования, состоящий из датчика диаметра навоя и датчика обратной связи.
2.Механизм но п. 1, отличающийся тем, что, с целью увеличения точности и быстродействия регулирования натяжения нитей основы,
нрименены иидуктивиый датчик натяжения иитей и реверсивная схема управления асинхронным двигателем.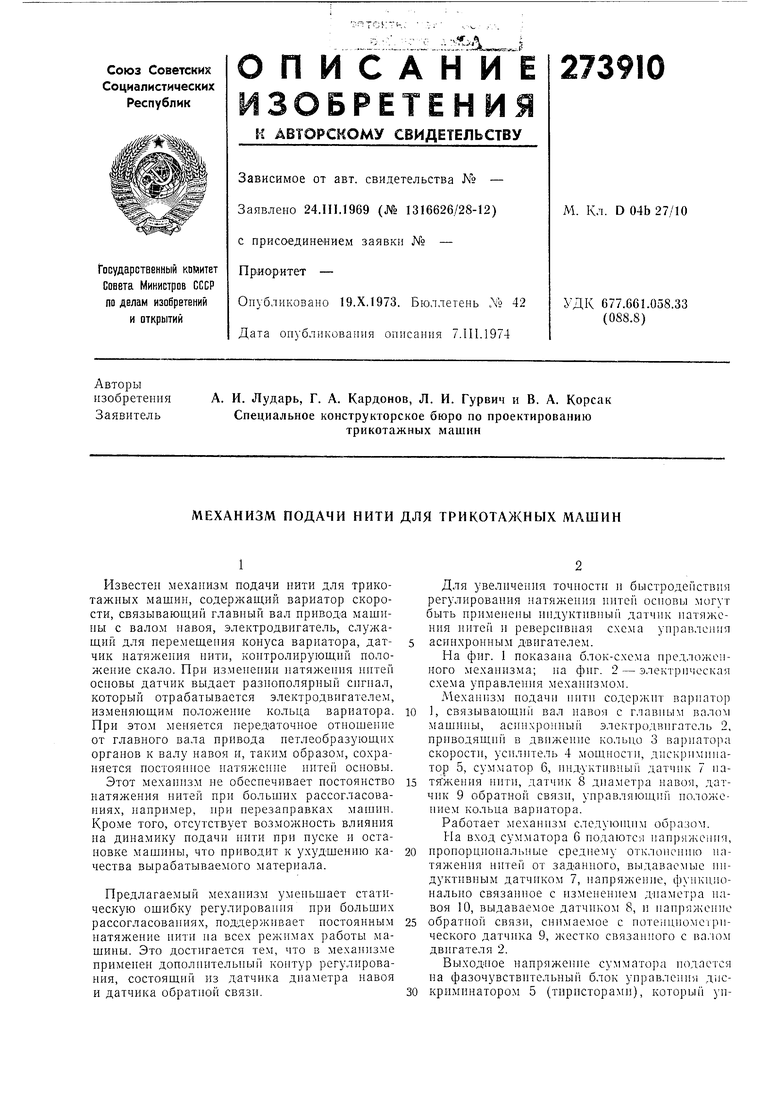
| название | год | авторы | номер документа |
|---|---|---|---|
| ЕХАНИЗМ ПОДАЧИ нити для ТРИКОТАЖНЫХМАШИН | 1974 |
|
SU326887A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| Основный регулятор ткацкого станка | 1988 |
|
SU1516537A1 |
| МЕХАНИЗМ ПОДАЧИ ОСНОВЫ ОСНОВОВЯЗАЛЬНОЙ МАШИНЫ | 1971 |
|
SU289156A1 |
| Устройство для регулированияпОдАчи НиТи | 1979 |
|
SU821576A1 |
| Регулятор натяжения нитей основы на ткацком станке | 1986 |
|
SU1390268A2 |
| Устройство для регулирования натяжения нитей основы на ткацком станке | 1988 |
|
SU1633036A1 |
| РЕГУЛЯТОР НАТЯЖЕНИЯ НИТЕЙ ОСНОВЫ | 1973 |
|
SU379697A1 |
| вСаСОЮЗНАЯ | 1973 |
|
SU379699A1 |
| Основный регулятор ткацкого станка | 1981 |
|
SU1326667A1 |