Изобретение относится к легкой промышленности и может быть использовано в текстильном машиностроении, в частности при автоматизации ткацких станков.
Известен способ регулирования производительности ткацкого станка путем стабилизации заданного заправочного натяжения основных нитей, сматываемых с навоя, за счет изменения угла поворота навоя на величину, соответствующую равенству длины основных нитей, свиваемых с навоя, длине основных нитей в элементе ткани, наматываемой на вальян [1]
Система регулирования производительности ткацкого станка, осуществляющая данный способ, содержит навой, скало и вальян, при этом скало связано с рычагом, соединенным через пружину и механический узел с навоем, механически связанным с вальяном [1]
Недостатком указанных тенически решений является малая точность и инерционность регулирования подачи основы и натяжения основных нитей, что связано с нелинейным взаимовлянием углов поворота скало, вальна и навоя и величины натяжения основны нитей.
Наиболее близким к предлагаемому является способ регулирования производительости ткацкого станка, включающий измерение действительной величины натяжения основных нитей и регулирование скорости вращения навоя [2]
Система регулирования производительности ткацкого станка для осуществления этого способа содержит датчик и задатчик натяжения основны нитей, электродвигатель, подключенный к выоду преобразователя напряжения и кинематически связанный с навоем [2]
Недостатком указанных технических решений является колебание натяжения нитей основы и пусковые пропуски ткани, связанные с нелинейным характером связей между мгновенными величинами натяжения нитей и напряжения, питающего электродвигатлеь, что снижает качество ткани, увеличивает расход основных нитей и снижает производительность ткацкого станка.
Целью изобретения является повышение качества ткани, снижение расхода основных нитей и повышение производительности ткацкого станка за счет повышения точности и быстродействия регулирования подачи и натяжения основных нитей.
Для этого в способе регулирования производительности ткацкого станка, включающем измерение действительной величины натяжения основны нитей и регулирование скорости вращения навоя, дополнительно измеряют действительные величины скорости вращения навоя и тока двигателя навоя, определяют заданную величину скорости вращения навоя по рассогласованию действительной величины натяжения от заданной, определяют заданную величину тока двигателя навоя по рассогласованию действительной и заданной величины скорости вращения навоя, а регулирование скорости вращения навоя осуществляют по рассогласованию измеренной и заданной величины тока двигателя навоя.
Кроме того, дополнительно измеряют величину скорости вальяна, а определение заданной величины скорости вращения навоя производят с учетом величины скорости вальяна.
Кроме того, действильную величину натяжения основных нитей определяют путем измерения величины углового положения скало, а заданную величину натяжения основных нитей устанавливают пропорционально заданной величине углового положения скало.
Система регулирования производительности ткацкого станка, содержащая задатчик натяжения и датчик натяжения, преобразователь напряжения, выходом соединенный с двигателем, кинематически связанным с навоем, дополнительно содержит датчик датчик скорости вращения навоя, датчики тока двигателя, блок формирования сигналов, блоки сравнения, регулятор натяжения, регулятор скорости, блок формирования величины заданного тока двигателя и блок регулирования тока двигателя, при этом выход датчика натяжени через блок формирования сигналов соединен с первым входом первого блока сравнения, выход которого подключен к первому входу регулятора натяжения, а второй вход первого блока сравнения соединен с выходом задатчика натяжения, выход датчика скорости навоя через блок формирования сигналов и через второй блок сравнения подключен к первому воду регулятора скорости, а второй вод второго блока сравнения соединен с выходом регулятора натяжения, выход регулятора скорости через последовательно соединенные блок формирования заданного тока и блок регулирования тока двигателя связан с управляющими входами преобразователя напряжения, выходы которого связаны с двигателем через датчики тока, а выходы датчиков тока соединены с вторыми входами блока регулирования тока двигателя.
Кроме того, в системе регулирования производительности ткацкого станка блок формирования заданной величины тока содержит регулятор частоты синхронизации, усилитель ортофазного тока и блок задания синфазного тока, генератор косинусной функции и генератор синусной функции, четыре умножителя и блок сумматоров, выходы которого являются выходами блока формирования заданной величины тока, а входы подключены к выходам умножителей, первые входы первого и второго из которы подключены к выходу генератора косинусной функции, первые входы третьего и четвертого к выходу генератора синусной функции, входы генератора косинусной функции и генератора синусной функции объединены и подключены к выходу регулятора частоты синхронизации, вторые выходы второго и четвертого умножителей подключены к выходу блока задания синфазного тока, при этом первый вход регулятора частоты синхронизации соединен с вторым выходом блока формирования сигналов, а второй вход подключен к выходу регулятора скорости, соединенного с входом усилителя ортофазного тока, причем датчик натяжения выполнен в виде датчика угла, кинематически связанного с осью рычага качающегося скало, а блок формирования сигналов содержит блок фильтров, преобразователь напряжения и генератор опорного сигнала, подключенный к датчику угла, выходами соединенному с фазочувствительным выпрямителем, выход которого образует первый выход блока формирования сигналов, второй выход которого образован выходом блока фильтров, соединенного с датчиком скорости вращения навоя, а входы регулятора частоты синхронизации и усилителя ортофазного тока являются соответственно входами блока формирования заданной величины тока.
Кроме того, в систему регулирования производительности ткацкого станка дополнительно введен датчик скорости вальяна, кинематически связанный с вальяном, и выходом подключенный к второму входу регулятора натяжения.
На фиг.1 приведена функциональная схема системы регулирования производительности ткацкого станка; на фиг.2 векторная диаграмма тока статора электродвигателя, поясняющая способ регулирования производительности ткацкого станка; на фиг. 3 диаграмма, поясняющая регулирование натяжения основных нитей; на фиг.4 чертеж навоя и скало, поясняющий процессы изменения натяжения основных нитей в зонах "навой-скало" и после скало.
Основные нити 1 (фиг.1) сматываются с навоя 2 через скало 3, соединенное с рычагом 4 ткацкого станка, который содержит также ламели 5, ремизки 6, образующие зев 7, бердо 8, укрепленное в батане 9, опушку ткани 10, шпарутки 11, грудницу 12, вальян 13, направляющий валик 14, товарный валик 15, редуктор 16, асинхронный двигатель 17.
Система регулирования содержит датчик 18 скорости вращения навоя, ось 19 рычага 4, пружину 20, муфту 21, датчик 22 углового положения скало, транзисторный инвертор 23, датчики 24, 25 фазного тока, выпрямитель 26, блок 27 регулирования тока, состоящий из сумматора 28, узлов 29 сравнения, регуляторов 30 тока, генератора 31 тактирующего сигнала и широтно-импульсных модуляторов 32, блок 33 формирования заданной величины тока, состоящий из генератора 34 косинусной функции, генератора 35 синусной функции, умножителей 36, блока 37 сумматоров, блока 38 задания синфазного тока, усилителя 39 ортофазного тока и регулятора 40 частоты синхронизации, регулятор 41 скорости, блок 42 сравнения, регулятор 43 натяжения, блок 44 фильтров, блок 45 сравнения, блок 46 задания натяжения, преобразователь напряжения 47, генератор 48 опорного сигнала, блок 49 формирования сигналов, датчик 50 скорости вальяна.
Уточная нить прокладывается в зев 7 и прибивается бердом 8 к опушке ткани 10, где образуется элемент ткани, состоящий из переплетенных основных и уточных нитей. Выработанная ткань, содержащая основные нити, проходит через вальян 13, направляющий валик 14 и навивается на товарный валик 15. Навой 2 через редуктор 16 механически связан с валом асинхронного двигателя 17 и датчиком 18 скорости вращения навоя. Ось 19 рычага 4 соед инена через муфту 21 с датчиком 22 углового положения скало, связывающим в совокупности с датчиком 18 скорости навоя механическую часть системы ткацкого станка, состоящую из основных нитей 1 и механических элементов 2-22, с электронной частью системы, выходы А, В, С которой, образованные выходами транзисторного инвертора 23, подключены к статорным обмоткам асинхронного двигателя 17.
Транзисторный инвертор 23 может состоять из транзисторных ключей, включенных по мостовой m-фазной схеме. На фазных выходах мостовой схемы транзисторного инвертора подключены датчики 24, 25 фазных токов, через которые транзисторный инвертор 23 подключен к клемам А, В, С фазных обмоток статора асинхронного двигателя 17. Силовые входы транзисторного инвертора 23 соединены с выходами выпрямителя 26, входы которого подключены к питающей сети.
Управляющие входы m-фазного (например, 3-фазного) транзисторного инвертора 23 подсоединены к 2m выходам блока 27 регулирования тока, содержащего сумматор 28, m узлов сравнения 29, m регуляторов 30 фазного тока, генератор 31 тактирующего сигнала, m широтно-импульсных модуляторов 32, два выхода каждого из которых подключены к управляющим входам соответственно первого и второго транзиcторных ключей соответствующей фазы мостовой схемы транзисторного инвертора 23. Выходы датчиков 24, 25 фазных токов через сумматор 28 и непосредственно подключены к соответствующим входам отрицательной обратной связи узлов сравнения 29. Каждый из m узлов сравнения 29 через сответствующий регулятор 30 фазного тока подключен к первому входу соответствующего широтно-импульсного модулятора 32, вторые входы m широтно-импульсных модуляторов объединены и подключены к выходу генератора 31 тактирующего сигнала. Управляющие входы узлов сравнения 29 подключены к выходам блока 33 формирования заданной величины тока двигателя навоя.
Выходы генератора 34 косинусной функции подключены к первым входам первой пары умножителей 36, выходы генератора 35 синусной функции соединены с первыми входами второй пары умножителей 36. Перекрестно объединенные между собой вторые входы первых умножителей первой и второй пар умножителей 36 подключены к выходу блока 38 задания синфазного тока. Выходы четырех умножителей 36 соединены с входами блока сумматоров 37, m выходов которых, образующих выходы блока 33 формирования величины заданного тока двигателя навоя, соединены с управляющими входами блока 27 регулирования тока. Объединенные входы генератора 34 косинусной функции и генератора 35 синусной функции подключены к выходу регулятора 40 частоты синхронизации, первый вход которого, объединенный с входом усилителя 39 ортофазного тока, соединен с выходом регулятора 41 скорости. Вход регулятора 41 скорости через блк сравнения 42 подключен к выходу регулятора 43 натяжения. Другой вход блока сравнения 42 соединен с вторым входом регулятора 40 частоты синхронизации. Объединенные между собой вторые входы блока сравнения 42 и регулятора 40 частоты синхронизации подключены через блок фильтров 44 к выходам датчика 18 скорости вращения навоя.
Вход регулятора 43 натяжения подключен к выходу блок 45 сравнения, один входкоторого соединен с задатчиком 46 натяжения, а другой вход подключен к выходу преобразователя напряжения 47, входы которого подключены к выходной обмотке датчика 22 углового положения скало. Обмотка возбуждения датчика 22 соединена с выходами генератора 48 опорного сигнала. Совокупность генератора 48 опорного сигнала, преобразователя напряжения 47 и блока фильтров 44 образует блок 49 формирования сигналов.
Кроме того, описанная система может содержать дополнительно датчик 50 скорости вальяна, механически связанный с валом вальяна 13, причем выход датчика 50 скорости вальяна 13 подключен ко второму входу регулятора 43 натяжения.
Система регулирования производительности ткацкого станка работает следующим образом.
Подача основы (основных нитей 1) в рабочую зону ткацкого станка производится путем сматывания с навоя 2 с заданным заправочным натяжением Fo. Огибая качающееся скало 3 с натяжением Fo, основные нити 1 воздействуют на угловое положение рычага 4. После прохождения через отверстия ламелей 5 основные нити 1 при вертикальном перемещении ремизок 6 образуют зев 7. С помощью берда 8 и батана 9 производится прибой уточной нити к опушке ткани 10, в результате чего изменяется как текущее натяжение F основных нитей 1 относительно заправочного натяжения Fo, так и натяжение ткани, проходящей через шпарутки 11, грудницу 12, вальян 13, направляющий валик 14 на товарный валик 15. Изменение натяжения основных нитей 1 компенсируется регулирвоанием их подачи с навоя 1 путем регулирования гула поворота и скорости вращения навоя 2.
За каждый оборот главного вала ткацкого станка скорость подачи основы изменяется в широких пределах за счет регулирования угловой скорости навоя Wнав в диапазоне от 0 до Wнав.max из следующего условия максимальной точности регулирования натяжения основы F(t)
F(t) Fo + Δ Fmin (t), (1) где Fo заправочное натяжение;
Δ Fmin (t) минимальная ошибка натяжения.
Минимизация ошибки натяжения Fmin (t) достигается тем, что мгновенная величина момента вращения навоя Мнав (t), равная
Мнав (t) F*(t) · R (2) где F*(t) натяжение основы в зоне навой-скало;
R радиус намотки основы на навое, изменяется за счет астатического регулирования (без статической ошибки) угловой скорости навоя Wнав (t) до полной стабилизации натяжения в зоне после скало, т.е. до достижения условия F(t) Fo, за минимальное время tomin.
Изменение натяжения основы осуществляются путем регулирования мгновенной величины момента М(t), механически связанного с навоем 2 через редуктор 16 асинхронного двигателя 17 согласно уравнениям
Мнав (t) i M (t), (3)
Wнав (t) W(t)/i (4) где М(t), W(t) момент и угловая скорость вращения асинхронного двигателя;
i передаточное отношение редуктора.
Редуктор 16 имеет постоянное передаточное число i, благодаря чему поддерживается пропорциональность между величиной скорости навоя 2, асинхронного двигателя 17 и датчика 18 скорости навоя
Wнав КUgc (5) где Ugc выходной сигнал датчика 18 скорости навоя.
При увеличении натяжения F(t) основных нитей 1 скало 3 вместе с рычагом 4 поворачивается вокруг оси 19 в нижнее положение до уравновешивания натяжения F(t) основных нитей силе тяги пружины 20. Связанный с осью 19 через муфту 21 вал датчика 22 углового положения скало поворачивается на угол ϕ (t), пропорциональный натяжению основных нитей F(t). Для стабилизации натяжения на уровне Fo с минимальной динамической ошибкой Fmin (t) поддерживается заданная начальная величина угла поворота датчика 22. Стабилизация натяжения осуществляется путем изменения подаваемой навоем 2 длины L основных нитей l пропорционально произведению величин угловой скорости вращения Wнав (t) навоя 2 и радиуса намотки основы R согласно уравнению
V(t) dL(t)/dt R·Wнав (t) (6) где V(t) скорость подачи основных нитей;
L(t) длина основных нитей;
R радиус намотки основы на навое;
Wнав(t) угловая скорость вращения навоя.
Скорость подачи основных нитей V(t) регулируется в функции ошибки натяжения Fmin (t) за счет точного регулирования момента и скорости асинхронного двигателя 17, осуществляемого путем векторного регулирования тока статора раздельным и взаимосвязанным изменением мгновенных величин фазы, частоты и амплитуды фазных токов статора в декартовой системе координат, фаза которой, образующая фазу синхронизации, изменяется синхронно с углом поворота навоя.
Векторное регулирование тока статора Is асинхронного двигателя 17 производится путем регулирования мгновенных величин фазных токов статора Isa, isb, isc в неподвижных координатах А, В, С во внутреннем контуре и управлением во внешнем контуре проекциями вектора тока статора Is во вращающейся декартовой системе координат у, х. Угловое положение декартовой системы координат у, х, характеризуемое фазой синхронизации ϕs, определется в функции скорости подачи основных нитей 1 и угла поворота θ скало 3, пропорционально натяжению Fо основных нитей 1. Внутренний контур регулирвоания вектора тока is в неподвижных координатах А, В, С реализуется с помощью транзисторного инвертора 23.
С помощью датчиков 24, 25 фазных токов измеряются действительные фазные токи статора Iа, Ib, Ic. Эти токи возникают в обмотках статора а, b, с при подаче на клеммы А, В, С обмотки статора выпрямленного напряжения с выхода выпрямителя 26 через периодически открывающиеся с частотой тактирования транзисторные ключи транзисторного инвертора 23. Фазные токи статора ia, ib, ic регулируются на каждом периоде тактирования с помощью блока 27 регулирования тока за счет широтно-импульсной модуляции рассогласований заданных и измеренных мгновенных величин фазных токов статора ia, ib, ic.
Сумматор 28 служит для образования сигнала отрицательной обратной связи по мгновенному фазному току iс в фазе С, не содержащей датчик фазного тока.
Рассогласование заданных и измеренных величин фазных токов образуются на выходе каждого из m углов 29 сравнения, где m число фаз асинхронного двигателя 17 и транзисторного инвертора 23.
С выходов регуляторов 30 фазного тока усиленные сигналы рассогласования одновременно с тактирующим сигналом генератора 31 подаются на входы соответствующих широтно-импульсных модуляторов 32. На выходах широтно-импульсных модуляторов 32 образуются импульсы управления транзисторными ключами транзисторного инвертора 23.
Управление вектором тока статора is во вращающейся декартовой системе координат у, х производится с помощью блока 33 формирования величины заданного тока. На выходе генератора 34 косинусной функции образуется сигнал cos ϕs, где ϕs фаза синхронизации, на выходе генератора 35 синусной функции образуется сигнал sin ϕs. С помощью умножителей 36 и блока 37 сумматоров производится преобразование декартовых координат вектора тока статора is в m-фазную систему заданных фазных токов в неподвижной m-осной системе координат a, b, c, отслеживаемую описанным внутренним контуром регулирования вектора тока статора.
Регулятор 41 скорости, выполненный в виде пропорционально-интегрального регулятора, обеспечивает функцию астатического регулирования мгновенной величины угловой скорости Wнавнавоя, сигнал заданной величины которой подается через первый вход блока 42 сравнения с выхода регулятора 43 натяжения, а действительная величина Wнав измеряется с помощью датчика 18 скорости. С выхода блока фильтров 44 сигнал измеренной скорости навоя 2 подается на второй вход блока 42 сравнения регулятора 41 скорости и одновременно на второй вход регулятора 40 частоты синхронизации. Заданная скорость навоя 2 изменяется в зависимости от натяжения F основных нитей 1 и угла поворота скало 3 за счет того, что на вход регулятора 43 натяжения с выхода блок 45 сравнения поступает сигнал рассогласования между заданным заправочным натяжением Fo и действительным натяжением F, пропорциональным углу поворота датчика 22 углового положения скало. Величина заправочного натяжения Fо задается с помощью блока 46 задания натяжения, а сигнал угла поворота скало 3 формируется на выходе преобразователя напряжения 47, преобразующего выходной сигнал датчика 22 углового положения скало, выполненного в виде бесконтактного вращающегося трансформатора, обмотка возбуждения которого питается от генератора 48 опорного сигнала. Совокупность узлов 44, 47, 48, образующих блок 49 формирования сигналов, формирует два сигнала обратных связей системы регулирования ткацкого станка, связывающих механическую часть, состоящую из элементов ткацкого станка 1-2, с электронной частью, образованную совокупностью элементов 23-48. За счет этих обратных связей операции управления и рабочие процессы регулирования механической и электронной частей ткацкого станка взаимосвязаны и в совокупности с процессами регулирования скорости, момента и вектора тока статора асинхронного двигателя образуют способ регулирования производительности ткацкого станка.
Способ регулирования подачи основы ткацкого станка заключается в том, что регулируют скорость подачи основных нитей пропорционально произведению величин угловой скорости Wнав вращения навоя и радиуса R намотки основы на навое из условия минимума ошибки Δ F(t) между заданным заправочным натяжением основы Fо и текущим натяжением основы после скало F(t) путем астатического регулирования угловой скорости вращения навоя пропорционально разности заданной и измеренной величин углового положения скало Δθ (t) θ3-θ (t) в соответствии с уравнением
V(t) dL(t)/dt Wнав (t) * R Kрн Δθ (t), (7) где Крн коэффициент усиления регулятора натяжения.
При этом астатическое регулирование угловой скорости вращения навоя производится путем векторного регулирования момента асинхронного двигателя в зависимости от разности величин заданной и измеренной угловой скорости вращения асинхронного двигателя W(t), пропорциональных соответственно заданной и действительной величинам угловой скорости вращения навоя. Для этого задают постоянную величину синфазного тока асинхронного двигателя Isyno, задают заправочное натяжение основы Fо, устанавливают соответствующее заправочному натяжению Fo начальное угловое положение скало θ3, измеряют величину углового положения скало θ3, сравнивают величину заправочного натяжения, пропорциональную начальному угловому положению скало, с величиной измеренного углового положения скало. Затем регулируют требуемую величину угловой скорости вращения навоя пропорционально разности величин установленного начального углового положения скало и измеренного углового положения скало, измеряют угловую скорость вращения навоя W, пропорциональную угловой скорости асинхронного двигателя, сравнивают требуемую и измеренную величины угловой скорости вращения навоя
Δ Wнав W*нав Wнав
Одновременно формируют скоростную составляющую фазы синхронизации путем развертки во времени t величины измеренной угловой скорости вращения навоя в соответствии с формулой
SW= Kϕ1 WНАВ(t)dt, (8) где К постоянный скоростной коэффициент развертки;
WНАВ(t)dt, (8) где К постоянный скоростной коэффициент развертки;
to начальный момент времени работы системы регулирования.
Затем формируют моментную составляющую фазы синхронизации путем развертки во времени величины требуемого момента М(t) асинхронного двигателя, образуемой с помощью пропорционально-интегрального регулятора 41 скорости за счет астатического регулирования величины ошибки между требуемой и измеренной угловой скорости вращения навоя
ϕsm= Kϕ2 M*(t)dt, (9) где Kϕ2 постоянный моментный коэффициент развертки.
M*(t)dt, (9) где Kϕ2 постоянный моментный коэффициент развертки.
Фазу синхронизации регулируют с помощью регулятора 40 частоты синхронизации в виде суммы двух составляющих скоростной и моментной составляющих фазы синхронизации согласно уравнению
ϕs ϕsw + ϕsm (10)
Пропорциональность выходного сигнала регулятора скорости 41 требуемой величине момента асинхронного двигателя М*(t) cоблюдается в том случае, если текущее значение фазы синхронизации равно текущему значению фазового угла вектора потокосцепления ротора асинхронного двигателя 17 относительно неподвижной магнитной оси фазной обмотки "а" статора асинхронного двигателя. Это равенство поддерживается за счет пропорционально-ингерального закона регулирования регулятора 41 скорости, воздействующего на регулятор 40 частоты синхронизации. При этом условии вектор тока is управляется двумя сигналами, пропорциональными ортогональным проекциям вектора тока статора is во вращающейся с частотой синхронизации декартовой системе координат у, х, ориентирующая ось у которой совпадает с направлением вектора потокосцепления ротора, как показано на фиг. 2. При такой синхронизации декартовых координат у, х (фиг. 2) задание постоянной величины синфазного тока Isyn Isyno на выходе блока 38 задания синфазного тока приводит к формированию в обмотках статора m-фазного асинхронного двигателя m-фазной системы синфазных токов, например, для трехфазного асинхронного двигателя
isyna Isyno * cos ϕs
isynb Isyno * cos ( ϕ3 -2π/3) (11)
isync Isyno * cos ( ϕs 4π/3)
Систма (11) синфазных токов возбуждает магнитное поле в асинхронном двигателе 17, характеризуемое вектором потокосцепления ротора  , модуль которого равен:
, модуль которого равен: = Ψro= Lm·Isyno, (12) где Lm взаимная индуктивность асинхронного двигателя.
= Ψro= Lm·Isyno, (12) где Lm взаимная индуктивность асинхронного двигателя.
Как показано на фиг. 2, вектор тока статора сдвигается относительно вектора ϑBarr на угол фазового сдвига ϕs при задании ортофазного тока Iort, при этом величина момента асинхронного двигателя и пропорциональная ей величина натяжения F основных нитей в зоне навой-скало определяется выражением
F 
 Zp
Zp Ψr·is·sinεϕ=k3·Iort,
Ψr·is·sinεϕ=k3·Iort,
(13) где R радиус навоя 2;
i передаточное отношение редуктора 16;
Im индуктивность ротора;
Is амплитуда фазного тока статора;
Zp число пар полюсов асинхронного двигателя;
εϕ=arctg угол фазового сдвига.
угол фазового сдвига.
Астатическое регулирование величины ортофазного тока Iort с помощью регулятора 41 скорости (фиг.1) обеспечивает пропорциональность величины натяжения F* и величины ортофазного тока Iort по уравнению (13) с учетом формриования ортофазных токов в виде
Iorta Iorto * sin ϕ3
iortb Iorto * sin (ϕs-2π/3)
iortc Iorto * sin ( ϕs-4π/3)
Как показано на диаграмме (фиг. 3), мгновенные величины фазных токов статора isa, isb, isc в неподвижных координатах а, b, c статора асинхронного двигателя формируются равными соответствующим проекций вектора тока статора is на неподвижные оси а, b, с статора. При этом фаза εs фазных токов статора образуется в виде суммы фазы синхронизации ϕs и угла фазового сдвига εϕ, зависящих от угла поворота θ рычага скало и ортофазного тока Iort, вектор которого направлен вдоль ортогогональный оси х вращающейся декартовой системы координат у, х. В результате такого векторного управления подачей основы ткацкого станка фазные токи регулируются равными разности синфазного и ортофазного токов
Isa isyna iorta
isb isynb iortb (14)
isc isync iortc а скорость подачи основных нитей V(t) регулируется пропорционально рассогласованию заданного заправочного натяжения Fo основных нитей и измеренного натяжения F за счет одновременного регулирования ортофазного тока и фазы сихронизации в функции измеренного угла поворота рычага скало.
Способ регулирования подачи основы заключается также и в том, что натяжение F основных нитей после скало в рабочей зоне ткацкого станка (фиг.4) регулируется равным заправочному натяжению Fo путем автоматического изменения натяжения F1*, F2* в зоне навой-скало в зависимости от угла охвата нитями скало при изменении радиуса намотки R основных нитей на навое, т.е. автоматической компенсации нелинейной связи натяжений F и F*:
F F* efα где α угол охвата нитями скало;
f коэффициент трения нитей о скало.
Регулированием величины момента асинхронного двигателя М автоматически компенсируется изменения радиуса R и угла α Дополнительно для повышения качества ткани за счет регулирования подачи основных нитей в функции скорости намотки ткани на вальян предусмотрена возможность изменять угловую скорость вращения навоя на величину, пропорциональную измеренной скорости вращения вальяна, для чего в устройство по фиг.1 дополнительно введен датчик 50 скорости вальяна, механичеcки связанный с вальяном 13, причем выход датчика 50 скорости вальяна подключен ко второму входу регулятора 43 натяжения.
Таким образом, благодаря вышеизложенному достигается повышение точности и быстродействия регулирования подачи и натяжения основных нитей ткацкого станка, что обеспечивает регулирование производительности ткацкого станка, определяемой скоростью подачи основы и скоростью намотки ткани, при устранении порока ткани "пусковая полоса", снижении обрывности основных нитей, уменьшении материалоемкости за счет управления уработкой ткани по основе и поддержании заданного натяжения основных нитей по мере срабатывания ткацкого навоя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ УРАБОТКИ ОСНОВЫ НА ТКАЦКОМ СТАНКЕ | 1992 |
|
RU2039136C1 |
| Основный регулятор ткацкого станка | 1988 |
|
SU1516537A1 |
| Основной регулятор ткацкого станка | 1986 |
|
SU1406236A1 |
| Устройство для регулирования натяжения нитей основы на ткацком станке | 1988 |
|
SU1633036A1 |
| Устройство управления натяжением нитей основы на ткацком станке | 1988 |
|
SU1664915A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Регулятор натяжения нитей основы на ткацком станке | 1989 |
|
SU1654390A1 |
Использование: в легкой промышленности, в частности в текстильном машиностроении. Сущность: способ регулирования включает измерение действительной величины натяжения основных нитей, измерение действительных величин скорости вращения навоя и тока двигателя навоя, определение заданной величины скорости вращения навоя по рассогласованию действительной величины натяжения от заданной, определение заданной величины тока двигателя навоя по рассогласованию действительной и заданной величины скорости вращения навоя и регулирование скорости вращения навоя по рассогласованию измеренной и заданной величины тока двигателя навоя. Система для осуществления предлагаемого способа содержит связанные через основные нити 1 навой 2, сжало 3, рычаг 4, ламели 5, ремизки 6, образующие зев 7, бердо 8, батан 9, опушку ткани 10, шпарутки 11, грудницу 12, вальян 13, направляющий валик 14, товарный валик 15. Система содержит также редуктор 16, асинхронный двигатель 17, датчик 18 скорости вращения навоя, ось 19 рычага 4, пружину 20, муфту 21, датчик 22 угла, транзисторный инвертор 23, датчики 24, 25 тока двигателя навоя, выпрямитель 26, блок 27 регулирования тока двигателя, состоящий из сумматора 28, узла сравнения 29, регулятора 30 тока, генератора 31 тактирующего сигнала, широтно-импульсного модулятора 32, блок 33 формирования заданной величины тока, состоящий из генератора 34 косинусной функции, генератора 35 синусной функции, умножителей 36, блока 37 сумматоров, блока 38 задания синфазного тока, усилителя 39 ортофазного тока и регулятора 40 частоты синхронизации, регулятор 41 скорости, узел 42 сравнения, регулятор 43 натяжения, блок 44 фильтра, узел 45 сравнения, блок 46 задания натяжения, фазочувствительный преобразователь 47, генератор 48 опорного сигнала, блок 49 обратных сигналов, датчик 50 скорости вальяна. 2 с. и 4 з. п. ф-лы, 4 ил.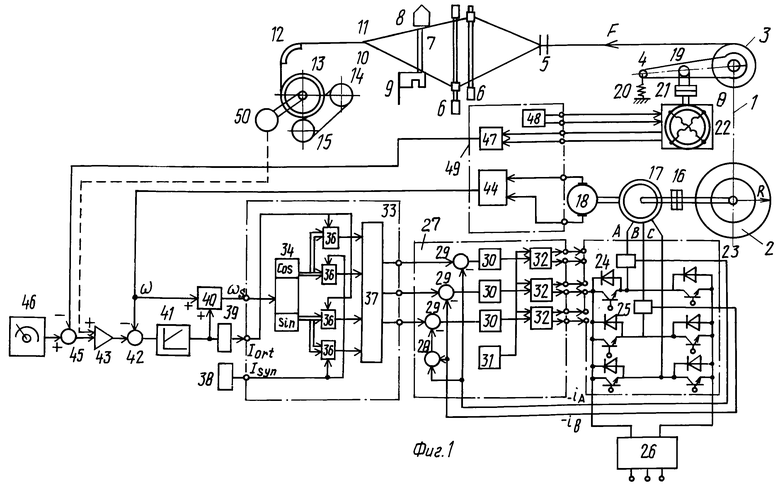
| Электромагнитный объемный насос | 1977 |
|
SU673753A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
