(Л
ел
сд
со
со 7 планетарной передачи вращается с определенной скоростью при определенной скорости водила 8 второго дифференциального ряда. При этом ВОДИЛО 8, опираясь на неподвижное колесо 26 и эпицикл 10, вращающийся с частотой, заданной то варным регулятором, вращает не только вал электродвигателя 5, но и эпицикл 1 1 , отпуская ниши основы с определенной скоростью. По мере сматывания нитей с навоя тормозной момент на валу электродвигателя уменьшается путем понижения напряжения на обмотках статора с помощью спе- . циалыюго регулятора и-совместно с приводом станка при меньггих диаметрах навоя Bpaniaer все с больщей
угловой частотой, сохраняя постоянной линейную скорость подачи нитей основы. При работе только одного дополнительного электродвигателя 5 при. остановленных водиле 8 и эпицикле 10, водило 6, отталкиваясь от колеса 26 и от эпицикла 10, через венцы 18, 19 и сателлиты 24, 25 вращает эпицикл
11 в сторону, противоположную вращению наборного вала 9 с определенной скоростью. Внутри цикла постоянстЁо натяжения нитей сохраняется путем изменения напряжения на обмотках статора электродвигателя 5 по сигналам датчика отклонения трехплечего рычага 2. При этом скорость вращения эпицикла 1 1 иэменяеП ся в ту или иную сторону, 1 з,п. ф-лы, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Основной регулятор ткацкого станка | 1986 |
|
SU1406236A1 |
| Основный регулятор ткацкого станка | 1989 |
|
SU1661253A1 |
| Основный регулятор ткацкого станка | 1989 |
|
SU1612009A1 |
| Основный регулятор ткацкого станка | 1986 |
|
SU1342947A1 |
| Товарный регулятор ткацкого станка | 1988 |
|
SU1548294A1 |
| Товарный регулятор ткацкого станка | 1991 |
|
SU1807120A1 |
| Механизм розыска "раза" к ткацкому станку | 1987 |
|
SU1509438A1 |
| Товарный регулятор ткацкого станка | 1989 |
|
SU1648999A1 |
| ПРИВОД РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ ТКАЦКОГО СТАНКА | 1990 |
|
RU2009282C1 |
| Ткацкий станок | 1989 |
|
SU1622449A1 |
Изобретение относится к текстильному машиностроению, может быть использовано на ткацких станках и позволяет повысить качество ткани. При работе только одного привода станка вал асинхронного электродвигателя 5 вращается с частотой выше синхронной, а центральное солнечное колесо 7 планетарной передачи вращается с определенной скоростью при определенной скорости водила 8 второго дифференциального ряда. При этом водило 8, опираясь на неподвижное колесо 26 и эпицикл 10, вращающийся с частотой, заданной товарным регулятором, вращает не только вал электродвигателя 5, но и эпицикл 11, отпуская ниши основы с определенной скоростью. По мере сматывания нитей с навоя тормозной момент на валу электродвигателя уменьшается путем понижения напряжения на обмотках статора с помощью специального регулятора и совместно с приводом станка при меньших диаметрах навоя вращает все с большей угловой частотой, сохраняя постоянной линейную скорость подачи нитей основы. При работе только одного дополнительного электродвигателя 5, при остановленных водиле 8 и эпицикле 10, водило 6, отталкиваясь от колеса 26 и от эпицикла 10, через венцы 18, 19 и сателлиты 24, 25 вращает эпицикл 11 в сторону, противоположную вращению наборного вала 9 с определенной скоростью. Внутри цикла постоянство натяжения нитей сохраняется путем изменения напряжения на обмотках статора электродвигателя 5 по сигналам датчика отклонения трехплечего рычага 2, при этом скорость вращения эпицикла 11 изменяется в ту или иную сторону. 1 з.п.ф-лы, 2 ил.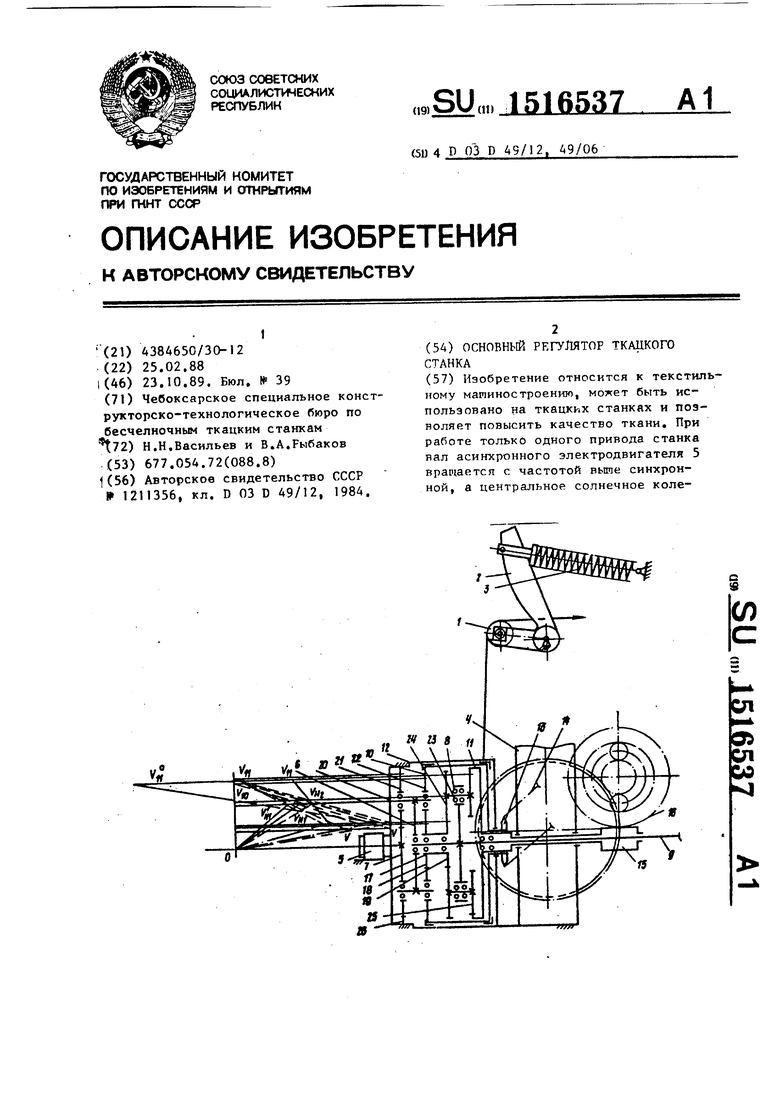
Изобретение относится к текстильному машиностроению и может быть ис- 25 пользовано на ткацких станках.
Целью изобретения является повышение кa ec iтia } 11фабатываемон ткани путем увеличения равномерности схода основных нитей с навоя,
На чертеже изображена кинематическая основного регулятора ткацкого с аика и картина скоростей подвижных элементой механизма регулирования скорости.
Основный регулятор ткацкого станка содержит скало 1, установленное на одном из плеч трехплечего рычага 2, датчик натяжения нитей основы (не показан), выполненный в виде преобра- зоват У;я перемещения скало в электрический сигнал, пружину 3, один конец которой.эакреплен на втором плече рычага 2, а.второй соединен с ос- товом 4 станка, датчик преобразования диаметра навоя в электрический сигнал (но показан), механизм регулирования скорости отпуска нижней Ьсновы, включающий электрически соединенный с датчиками электродвигатель 5, частота вращеюш вала которого пропорциональна суммарной величине электрических сигналов, и дифференциал, состоящий из двухступенчатой дифференциальной передачи и к}1нематически свя заниой с ней посредством водила 6 планетарной передачи, центральное колесо 7 которой соединено с валом
,-
25
30
35
Q .с 50
55
электродвигателя 5, а водило 8 дифференциальной передачи установлено на наборном валу 9 станка, Дифференциг; альная передача дополнительно имеет два эпицикла 10 и II, первый 10 из которых установлен в корпусе 12 дифференциала с возможностью свободного вращения и кинематически связан посредством звездочки 13 и цепной передачи 14 с вальяном товарного регулятора (не показан), а второй 11 установлен с возможностью свободного вращения на наборном валу 9 станка и кинематически связан посредством червяка 15 и червячного колеса 16 с механизмом отпуска нитей основы, при этом эпициклы 10 и II кинематически связаны между собой, а водило 6 планетарной передачи и солнечное колесо 17 дифференциальной передачи установлены на наборном валу 9 с возможностью свободного вращения, причем солнечное колесо 17 вьтолнено двух- венцовым и имеет соответственно два венца 18 и 19, Кинематическая связь между циклами 10 и I1 имеет блоки, каждый из которых содержит два установленных на оси сателлита для первой и второй ступени дифференциальной передачи, при этом ось 20 первого блока сателлитов 21 и 22 жестко - установлена на водиле 6 планетарной передачи,а ось 23 второго блока са- теллитов 24 и 25 установлена на вход ном водиле 8 дифференциальной пере- дачи с возможностью свободного враще515
ния, Причем сателлиты 21 и 22 первого блока установлены на оси 20 с возможностью свободного вращения и зацепления с одной стороны сателлитом 21 с центральным колесом 7 планетарной передачи, с другой - сателлитом 22 с венцом 18 солнечного колеса 17 и с первым эпициклом 10 дифференциальной передачи, а сателлиты 2А и 25 второго блока жестко установлены на оси 23 и с возможностью зацепления г одной стороны сателлитом 24 с вторым венцом 19 солнечного колеса и с вторьм эпициклом 11 диффз ренциальной передачи.
Опорный реактивный момент в передаче воспринимает колесо 26 с внутренним зацеплением. Колесо 26 закреплено неподвижно в корпусе 12 и зацеплено с сателлитами 21. Каждая отдельно пара - центральное колесо 7 и эпицикл 11, венцы 18 и 29 солнеч- го колеса 17, сателлиты 21 и 22, сателлиты 24 и 25, эпициклы 26 и 10 имеют такие разные числа зубьев, какие обеспечивают при максимальной частоте вращения вала электродвигателя 5 наименьшую частоту вращения эпицикла - выходного центрального к леса 11 при максимальной плотности ткани по утку, т.е. при минимальной частоте вращения эпицикла 10, В случае -использования в регуляторе асинхронного электродвигателя числа зубьев подвижных г лемен ов передачи выбирают с таким расчетом, чтобы под действием только одного привода станка вал двигателя вращался с частотой выше синхронной на прямолинейном участке механической характеристики в генераторном (тормозном) режиме работы Электродвигатель в этом случае возвра цает энергию обратно в сеть, напряжение на обмотках его статора регулируется споциалыштм регулятором (не показан), связанным с датчиком диаметра навоя.
Дифференциальные ряды передачи замкнуты между собой через механизмы изменения плоттюсти ткани по утку и подачи нитей основы, а входы передачи связаны с наборным валом и через электродвигатепь с датчиками натяжения нитей и изменения диаметра навоя, В этом случае обеспечивается полная взаимосвязь и механическая обратная связь между входами переда376
чи и изменяюпо .мися по мере подачи нитей основы параметрами регулятора. При такой замкнутой механической сие- теме механизм регулирования скорости :приобретает функциональные возможности автоматического вариатора нефрикционного типа, осуществляющего ЕнутрициклоБое регулирование в зависимости от натяжения нитей основы и внецикловое регулирование в зависи- мости от изменения диаметра навоя по сигналам от датчиков. Необходимый диапазон регулирования при этом невeлi к, так как он охватывает лишь изменение диаметра навоя от 940 до 150 мм, которое может быть преобразовано с помощью датчика и специального регулятора напряжения в пропорциональное изменение моментов на валу аси гкронного электродвигателя в тех границах, соответствующих диапазону изменения частоты вращения этого вала на прямолинейном участке генераторного и двигательного режимов рабочъ.
Основный регулятор ткацкого стан- .а работает след ющим образом.
При работе только привод станка
вал дополнительного асинхронного электродвигателя 5 привода регулятора вращается с частотой выше синхронной, а центральное солнечное колесо 7 планетарной передачи враща ется со скоростью V при определенной скорости ц водила 8 второго диффе- реициальт1ого ряда. Скорости подвлж- ных элементов ппанетарной и двухступенчатой дис|)ферен.иальной передач
для этого случая показаны пунктирными линиями. При этом водило 8, опираясь на неподвижное колесо 26 и эпицикл 10, вращающийся с частотой, заданной товарным регулятором при оп)еделенной плотности ткани по утку, при действ11И сравнительно большого крутящего момента, так как он связан с ПЫХОД1ШМ звеном механизма.изменег ния плотности ткани по утку, напри- .
мер с вальяном, рращает не только вал электродвигателя 5, но и эпицикл 11, отпуская нити основы с определенной скоростью. Скорости эпициклов 10 и 11 обозначены для этого случая соответственно V,Q и V, , водил Vjj и V.
По мере сматывания нитей с навоя тормозной момент на валу электродвигателя л меньшается путем понижения
напряжения на обмотках статора с помощью специального регулятора. После перехода через нуль оси моментов механической характеристики электродвигатель 5 начинает работать в двигательном режиме и совместно с приводом станка при меньших диаметрах навоя вращает все с большей угловой частотой, сохраняя постоянной ли нейнуто скорость подачи нитей основы. Скорости вращения подвижных элементов передачи в конце прямолинейного участка механической характеристики в двигательном режиме работы элек- тродвигателя 5 показаны штрихпунктир ными линиями и обозначены I
V;, V,,., v; , У„ и VH, .
При работе только одного дополнительного электродвигателя 5 при остановленных водила 8 и эпицикле 10 6, отталкиваясь от колеса 26 и от эпицикла 10, через сателлиты 18, 19 и 2А и 25 вращает эпицикл
11 в сторону, противоположную враще нию наборного вала 9 со скоростью
° , Скорости подвижных элементов передачи для этого случая показаны сплошными линиями. При работе одного дополнительного электродвига- теля 5 производится заправка станка путем наматывания нитей основы на навой, а также подтягивание их в процессе работы и при наладке станка,
Внутри цикла постоянство натяжения нитей сохраняется путем-изменения напряжения на обмотках статора электродвигателя 5 по сигналам датчика отклонения трехплечего рычага 2 от равновесного положения в большую или в,меньш то сторону. При этом скорость вращения колеса-эпицикла 11 из меняется Р ту или иную сторону,
Момент на палу асинхронного элек- тродвщ-птеля 5 пропорционален квад-. ряту напряжения, поэтому чувстви- тельнос1Ь и быстродействие регулятора высоки, что обеспечивает восстановление равновесного положения рычага 2 внутри цикла, сохраняет по- стоянство натяжения при минимальных амплитуде и частоте колебаний рычага
2отност тельно равновесного положения ,
Кроме этого, регулятор является вариатором нефрикционного типа, воздействующим непосредственно постоянно без размыкания кинематической це- , пи на скорость врап1ения выходного ко
,-
дj
20
25
Q .
-с
г
35
55
леса-эпицикла 11, Регулятор непрерывного действия, в котором привод механизма регулирования скорости взаимосвязан с приводом от главного вала станка, устанавливает жесткую связь между главным валом и червяком механизма отпуска основы станка, Поэтому такой регулятор не теряет углы поворота главного вала. Из-за этого, а также вследствие возможности установления определенной скорости вращения вала электродвигателя путем воздействия только приводом станка, последний восстанавливает при очередном пуске то динамическое равновесие рычага 2, пружины 3 и скало 1, которое существовало в момент остановки станка. Этим предотвращается появление пусковьк полос при выработке ткани.
Все подвижные элементы передачи регулятора вращаются в одну сторону (вправо), чем резко ограничивается влияние кинематических погрешностей (люфт, мертвый ход) от неточности изготовления. Отсутствие реверса резко ограничивает время переходного процесса выбега из разгона.
Основной момент на отпуск предварительно натянутых нитей основы снимается с наборного вала стайка, дог полнительный электродвигатель используется лишь в замыкающей ветви, в которой действуют незначительные момен- ты уменьщенные в передаточное число планетарной и дифференциальной передач раз. Это, а также то, что дифференциальная передача выполнена на базе редуктора Давида с одним внешним и с одним внутренним зацеплениями, имеющим высокий КПД позволяет выбрать в приводе механизма регулирования скорости маломощный асинхронный электродвигатель 0,06-0,09 кРт, что уменьшает габариты регулятора потребление электроэнергии в сети, маховые массы ротора. При выборе определенных параметров зубчатых колес пег редач регулятора возможна работа электродвигателя в генераторном режиме с возвратом части потребляемой приводом станка энергии обратно в сеть. Электродвигатель постоянного . тока такой же мощности дороже и боль- ще габаритами, чем асинхронный элек- , тродвигатель. Электродвигатель постоянного тока вследствие специфичности ткацкого производства должен быть Bbf
полней по взрывобезопасном исполнении, он при незначительных скоростях вращения вала имеет очень низкий КПД.
Изобретение позволяет резко повыг сить качество (точность, чувствительность, устойчивость, быстродействие) регулирования, упростить конструкцию основного регулятора, отпускать нити основы плавно, что резко снижает обрывность нитей, шум и динамические нагрузки, повьппает ка- .честно вьфабатьшаемой ткани.
Формула изобретения
1, Основнь1Й регулятор, ткацкого станка, содержащий скало, устанонлен- ное на одном из плеч трехплечего ры- чага, датчики натяжения нитей основы внутри цикла работы станка и изменения радиуса навоя, механизм регулирования скорости отпуска нитей ос(ювы, включающий электродвигатель, электрически соединенный с датчиками, и дифференциал, состоящий из двухступенчатой дифференциальной передачи и кинематически связанной с ней посредством водила планетарной передачи, центральное колесо которой соединено с валом электродвигателя механизма регулирования скорости отпуска нитей основы, а водило дифференциальной передачи установлено на наборном валу стан15а,,о т .- личающийся тем, что,,с целью повьппения качества вырабатьшае- мой ткани путем увеличения равномерности схода основных нитей с навоя, дифференциальная передача.дополнительно имеет два эпицикла, первый из
o
5
0
5
0
5
0
Которых установлен в корпусе дифференциала с возможностью свободного вращения и кинематически связан с вальяном товарного регулятора, а второй установлен с возможностью свободного вращения на наборном валу станка и кинематически связан с механизмом отпуска нитей основы, при этом эпициклы кинематически связаны между собой, а водило планетарной передачи и солнечное колесо дифференциальной передачи установлены на наборном валу с возможностью свободного вращения, причем солнечное колесо выполнено двухвенцовым.
2, Регулятор по п. 1, отличающий с я тем, что кинематическая связь между эпициклами имеет блоки, каждый из которых содержит два установленных на оси сателлита для первой и второй.ступеней дифференциальной передачи, при этом ось первого блока сателлитов жестко установлена на водиле планетарной передачи, а ось второго блока установлена на водиле дифференциальной neper дачи с возможностью свободного вращения, причем сателлиты первого блока установлены на оси с возможностью свободного вращения и зацепления, с одной стороны с центральным колесом планетарной передачи, а с другой г с одним из венцов солнечного колеса и с первым эпициклом ди(})ференциальной передачи, а сателлиты второго блока жестко установлены на оси и с возможностью зацепления с одной стороны с вторым вен- ,цом солнечного колеса и с вторым stm- циклом дифференциальной передачи.
