Изобретение относится к области измерения приращения индукции магнитного поля с помощью компонентных преобразователей на подвижной штанге.
Эта область измерения освоена в меньшей степени, чем измерение самой индукции, и как следствие, в ней еще не установилась правильная терминология. Часто в литературе вместо естественного термина измерение компоненты “приращения магнитной индукции” используется термин “градиент магнитной индукции”, что представляется неправильным, так как градиент магнитной индукции - это совокупность девяти пространственных производных индукции, из которых, как правило, 5 независимы. Соответственно, часто дифференциальный магнитометр в литературе именуют градиентометром, продольным градиентометром, поперечным градиентометром, тогда как градиентометр должен быть пятикомпонентным прибором. Ниже наряду с правильной терминологией “приращение магнитной индукции, дифференциальный магнитометр... ” используются термины градиент и градиентометр в связи с их распространенностью в отечественной и зарубежной литературе.
В монографии [Ю.В.Афанасьев, Феррозонды. Энергия, 1969 г., стр.152-153] отмечается изобретение [Ю.В.Афанасьев и Ю.В.Алексеев. Устройство для измерения градиента магнитного поля, А.С. №160596, Опубликовано 31.1. 1964, Бюллетень №4] и аналог этого изобретения [Э.Д.Гриньков и др. Компенсация погрешностей феррозондового градиентометра. Геофизическая аппаратура, вып. 26, Недра 1965 г., стр.29-32], направленные на решение “основной проблемы, с которой приходится сталкиваться при проектировании градиентометров” проблемы соосности магнитных осей феррозондов. Ссылки на проблему соосности и на упомянутое изобретение продолжались и много лет позже [Ю.В.Афанасьев и др.. Магнитометрические преобразователи, приборы, установки, Энергия, 1972 г., стр.223], [Ю.В.Афанасьев и др., Средства измерений параметров магнитного поля. Энергия, 1979 г., стр.226-228]. Монография [Ю.В.Афанасьев, 1969 г., стр.156] завершается следующим абзацем: “Нет сомнений в том, феррозондовые приборы будут использованы и при изучении лунной поверхности... достаточно простые феррозондовые градиентометры с чувствительной системой, выполняемой в виде тонкой трости-щупа, могут быть с успехом использованы космонавтами, впервые вступающими на поверхность Луны”.
Через 17 лет в другой монографии того же автора [Ю.В.Афанасьев. Феррозондовые приборы, Л-д, Энергоатомиздат, 1986, стр.140] анализируются причины, почему переносные градиентометры так и не были разработаны и вновь указывается на трудности обеспечения высокой степени параллельности магнитных осей феррозондов, установленных на штанге как на главную проблему, препятствующую разработке и использованию градиентометров в земных условиях. Это свидетельствует о том, что упомянутое изобретение и его аналог не оправдали надежд в решении проблемы соосности феррозондов на штанге. Со временем это стал признавать и сам автор упомянутого изобретения: “Минимизация погрешностей от не параллельности осей феррозондов частично*) достигается за счет автоматического ввода поправок от третьего феррозонда, установленного в плоскости угла непараллельности перпендикулярно первым двум феррозондам [10]**). Однако такой способ не является надежным и требует периодических регулировок.*) Более надежным представляется способ “окраски” ложного сигнала за счет вращения чувствительной системы градиентометра вокруг базовой оси либо осуществление компенсации не только продольной, но и поперечных компонент магнитного поля Земли в объеме системы.” [Ю.В.Афанасьев и др., 1979 г., стр.228].
*) Курсив авторов заявки.
**) Ссылка на описание изобретения в работе [Ю.В.Афанасьев, 1969 г.].
В чем заключается способ “окраски” и как осуществляется компенсация поперечных компонент автор не разъясняет.
Далее Ю.В.Афанасьев [1986, стр.140] в разделе Магнитные градиентометры упоминает “приемы минимизации погрешностей от непараллельности осей”, связанные с “поворотами штанги на 180° вокруг продольной оси и вокруг ее центра”, называет эти приемы “наиболее эффективными”, но не рекомендует их к применению, по крайней мере, в подвижном градиентометре. Т.е. фактически он предлагает использовать подвижной градиентометр в стационарном режиме. Опять автор не разъясняет в чем заключаются сами приемы минимизации, а отсылает читателя к своей более ранней монографии [Ю.В.Афанасьев и др., 1972 г.].
В итоге Ю.В.Афанасьев [1986, стр.141] делает спорное заявление: “... реализовать предельные возможности феррозондовых градиентометров (на уровне шумов феррозондов) можно лишь в слабых магнитных полях... , например на Луне... ”, т.е. исключается возможность их работы в земных условиях.
Следует отметить работу, посвященную компенсации угловых погрешностей в стационарном дифференциальном магнитометре с большим базовым расстоянием между трехкомпонентными измерительным и компенсационным датчиками [Ю.В.Афанасьев и Р.Г.Скрынников. Учет угловых погрешностей при компенсации вариаций, Труды метрологических институтов СССР, вып. 140 (200), 1972 г., стр.64-69]. Авторы [Ю.В.Афанасьев и Р.Г.Скрынников, 1972 г., стр.68, Рис.3] предложили компенсировать угловые погрешности стационарного дифференциального магнитометра поперечными резистивными связями между выходами компенсационного канала и входами измерительного канала. Однако, при этом авторы не предложили способа нахождения, наблюдения или учета угловых погрешностей, хотя и назвали свою работу “Учет угловых погрешностей... ”. Т.е. был предложен способ компенсации, который не давал возможности следить за изменением компенсируемой величины и фиксировать момент ее минимизации. К тому же авторы вывели неверное итоговое соотношение между компенсируемым (угловой погрешностью) и компенсирующим (сопротивлением) параметрами [Ю.В.Афанасьев и Р.Г.Скрынников, 1972 г., стр.67, Соотношение (6)]. Ошибочность этого соотношения будет показана ниже.
Несмотря на то, что способ, описанный в работе Ю.В.Афанасьева и Р.Г.Скрынникова [1972 г.], не был реализован, а в силу вышесказанного и не мог быть реализованным, он принят в качестве ближайшего аналога заявляемому способу по совокупности существенных признаков.
Известный способ [Ю.В.Афанасьев и Р.Г.Скрынников, 1972 г.] включает измерения трех компонент приращений магнитной индукции в измерительном канале и трех компонент вариаций геомагнитного поля в компенсационном канале и наложение продольных и поперечных резистивных связей между выходами компенсационного и входами измерительного каналов, а также коррекцию нулей измерительного канала для минимизации аддитивных погрешностей в дифференциальном магнитометре. Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа, является стационарность (неподвижность) дифференциального магнитометра, невозможность наблюдения за компенсируемой величиной и невозможность фиксации момента компенсации при изменении сопротивления в соответствующей цепи продольной или поперечной связи.
Задачей, на решение которой направлено заявляемое изобретение, является минимизация группы аддитивных погрешностей в подвижном дифференциальном магнитометре, в том числе и угловых погрешностей, или погрешностей от несоосности одноименных преобразователей измерительного и компенсационного каналов. Технический результат, получаемый при осуществлении изобретения, заключается в снижении порога чувствительности дифференциального магнитометра и в возможности измерения слабых приращений магнитной индукции в движении на фоне магнитного поля Земли.
Указанный технический результат достигается тем, что в заявляемом способе минимизации погрешностей в дифференциальном магнитометре, включающем измерения трех компонент приращения магнитной индукции и трех компонент вариаций магнитного поля Земли, наложение продольных и поперечных резистивных связей между выходами компенсационного и входами измерительного каналов, а также коррекцию нулей последних, в отличие от известного способа, в условиях однородного магнитного поля, например поля Земли, В, измеряют компенсационным каналом в системе координат штанги с преобразователями три компоненты всего поля  , затем штангу дважды ориентируют одной из осей, например осью 1, по полю так, чтобы обратить две компоненты поля в нуль:
, затем штангу дважды ориентируют одной из осей, например осью 1, по полю так, чтобы обратить две компоненты поля в нуль:
измеряют соответствующие приращения:
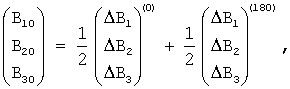
определяют вектор-столбец уходов нулей измерительного канала по формуле
и осуществляют коррекцию уходов введением постоянных поправок на определенные величины, взятые с обратным знаком -В10, -В20, -В30, затем штангу трижды ориентируют по полю так, чтобы обратить две компоненты поля в нуль:
при этом наблюдая вектор-столбцы соответствующих приращений:
компенсируют до нуля каждую компоненту Δ Bij(i,j=1,2,3,i≠j) подбором сопротивления соответствующей цепи поперечной связи, а каждую компоненту Δ Bii(i=1,2,3) подбором шунтирующего сопротивления плеча соответствующей продольной связи.
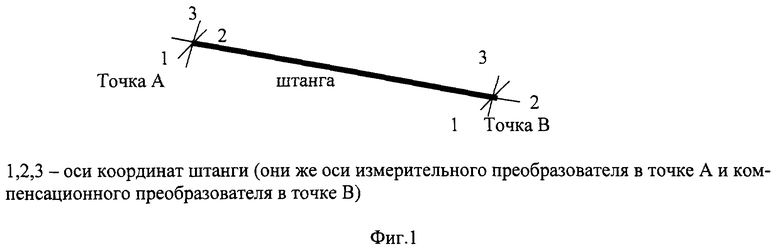
На фиг.1 изображена штанга схематически с системой координат наблюдения и с осями трехкомпонентных преобразователей.
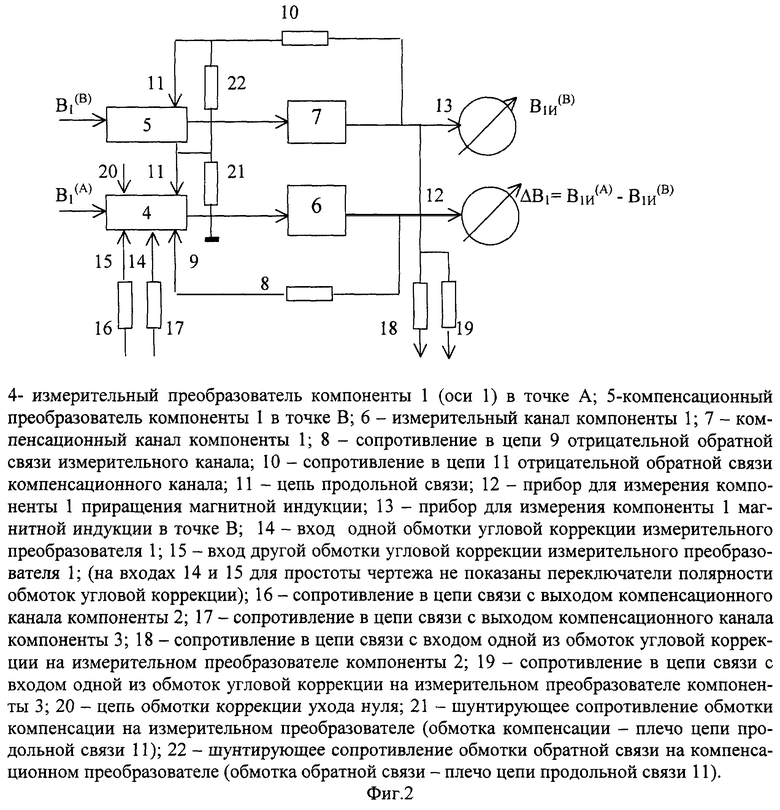
На фиг.2 изображена одна компонента функциональной схемы реализации заявляемого способа минимизации погрешностей в дифференциальном магнитометре.
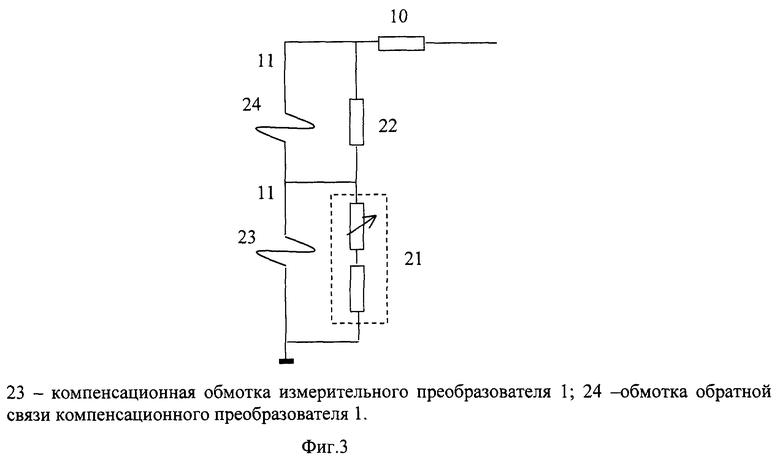
На фиг.3 изображен фрагмент функциональной схемы (цепь продольной связи).
Штанга имеет оси координат 1, 2, 3, которые также являются осями измерительного преобразователя в точке А и осями компенсационного преобразователя в точке В. Функциональная схема включает измерительный преобразователь 4 компоненты 1 (оси 1) в точке А и компенсационный преобразователь 5 компоненты 1 в точке В, выход преобразователя 4 связан со входом измерительного канала 6, а выход преобразователя 5 со входом компенсационного канала 7. Измерительный канал 5 охвачен отрицательной обратной связью через сопротивление 8 по цепи 9 к преобразователю 4, а компенсационный канал через сопротивление 10 по цепи 11 к входу преобразователя 5 и ко второму входу преобразователя 4. На выходе канала 6 установлен прибор 12 для измерения компоненты 1 приращения магнитной индукции между точками штанги А и В, а на выходе канала 7 прибор 13 для измерения компоненты 1 магнитной индукции в точке В. Измерительный преобразователь 4 содержит две обмотки угловой коррекции, входы 14 и 15 которых через переключатели полярности (которые для простоты чертежа не изображены) и через регулируемые сопротивления 16, 17 связаны с выходами компенсационного канала компонент 2 и 3. Выход компенсационного канала 7 через регулируемые сопротивления 18 и 19 (и через переключатели полярности, опущенные для простоты чертежа) связаны с входами обмоток угловой коррекции на измерительных преобразователях компонент 2 и 3. На преобразователе 4 размещена также обмотка коррекции ухода нуля со входом 20. Обмотка обратной связи компенсационного преобразователя 5 и включенная последовательно компенсационная обмотка измерительного преобразователя 4 образуют цепь продольной связи 11, зашунтированную регулируемыми сопротивлениями 21 и 22. На фиг.3 изображена цепь продольной связи 11 более подробно в виде компенсационной обмотки 23 измерительного канала и обмотки обратной связи 24 компенсационного канала. Обмотки образуют плечи цепи продольной связи 11.
Заявляемый способ минимизации погрешностей в дифференциальном магнитометре осуществляется следующим образом.
В условиях отсутствия неоднородных магнитных помех ориентируют штангу одной из осей ее вдоль однородного магнитного поля, например осью 1 вдоль поля Земли, В, так чтобы показания приборов в компенсационных каналах компонент 2 и 3 (аналогичных прибору 13 для компоненты 1) были бы равны нулю, т.е.  . Затем штангу переворачивают и ориентируют так, чтобы показания приборов были бы
. Затем штангу переворачивают и ориентируют так, чтобы показания приборов были бы  При каждой ориентации штанги измеряют вектор-столбцы приращения магнитной индукции. Прибором 12 измерительного канала 6 измеряют компоненту 1 приращения, аналогичными приборами измерительных каналов компонент 2 и 3 измеряют компоненты 2 и 3 приращения.
При каждой ориентации штанги измеряют вектор-столбцы приращения магнитной индукции. Прибором 12 измерительного канала 6 измеряют компоненту 1 приращения, аналогичными приборами измерительных каналов компонент 2 и 3 измеряют компоненты 2 и 3 приращения.
То есть измеряют вектор-столбцы приращений  и
и  . После чего определяют вектор столбец уходов нулей измерительного канала как полусумму приращений
. После чего определяют вектор столбец уходов нулей измерительного канала как полусумму приращений
и осуществляют коррекцию уходов нулей введением постоянных поправок на определенные величины, взятые с обратным знаком -В10, -В20, -В30. Например для компоненты 1 коррекцию вводят, выбирая сопротивление коррекции нудя в цепи обмотки коррекции нуля 20 и соответствующую полярность обмотки (сопротивление, обмотка и переключатель полярности обмотки не показаны на фиг.2 для простоты чертежа), исходя из общеизвестного соотношения
где Rкн - сопротивление коррекции нуля, Ом;
Uо - постоянное напряжение опорного источника, В;
Скн - постоянная по магнитной индукции обмотки коррекции нуля, Т/А.
Т.е. определение ухода нуля компоненты 1 В10 однозначно определяет необходимую величину сопротивления в цепи коррекции, так как остальные величины (напряжение опорного источника и постоянная обмотки) известны, либо могут быть определены заблаговременно. Все вышесказанное справедливо и для остальных компонент 2 и 3. После введения коррекции нулей штангу трижды ориентируют по полю так, чтобы обратить следующие две компоненты в нуль:
и измеряют вектор-столбцы соответствующих приращений:
Затем по очереди наблюдая каждую из компонент приращения, компенсируют ее до нуля, выбирая соответствующее сопротивление цепи поперечной либо продольной связи между компенсационным и измерительным каналами.
Например, по знаку компоненты Δ B21, выбирают одно из положений переключателя полярности обмотки угловой коррекции на измерительном преобразователе компоненты 2 в цепи сопротивления 18 и, регулируя величину сопротивления 18, компенсируют Δ B21 до нуля. Затем аналогично компенсируют компоненту Δ B31 до нуля, регулируя сопротивление 19, и т.д. для остальных компонент с неодинаковыми индексами. Компоненту Δ B11 компенсируют до нуля, регулируя величину сопротивления 21 в цепи продольной связи 11, аналогично и для остальных компонент с одинаковыми индексами.
Покажем сначала, почему компенсация до нуля компонент приращения с неодинаковыми индексами Δ Bij(i,j=1,2,3,i≠j) в условиях воздействия однородного поля эквивалентна минимизации угловых погрешностей в дифференциальном магнитометре. Для этого рассмотрим модель статической погрешности измерения трехкомпонентным магнитометром. Результат измерения Вu индукции магнитного поля В с помощью трехкомпонентного преобразователя, отягощенный статической погрешностью, можно представить с помощью некоторой искажающей 3× 3 матрицы и как
Вu=и.В,
откуда статическая погрешность выражается как (и-I)· В. Чем точнее измерение, тем ближе искажающая матрица к единичной. Диагональные элементы искажающей близки к единице, а боковые элементы близки к нулю. В этом соотношении матрица и и вектор-столбец В должны рассматриваться в одной и той же системе координат, от которой вектор-столбец Bu не зависит, будучи просто тремя числами, тремя результатами измерения. Применяя вышеприведенное соотношение к измерениям приращений между точками А и В, запишем в условиях однородного поля ВA=BB=В
(иA-иB)· В=θ · В,
где θ - матрица 3× 3 не идентичности измерительного и компенсационного каналов дифференциального магнитометра.
Как показано в работе [Г.А.Внучков и др. Угловые погрешности измерения магнитной индукции в сб. Методы и средства исследований структуры геомагнитного поля, М., ИЗ-МИРАН, 1989 г., стр.161-168], боковым элементам искажающих матриц и матрице не идентичности каналов можно придать угловую интерпретацию, но здесь конкретная интерпретация угловых погрешностей не потребуется. Здесь достаточно знать, что боковые элементы матрицы неидентичности θ , характеризующие угловые погрешности какие-то безразмерные положительные и отрицательные числа, близкие к нулю, постоянные, которые могут быть определены в системе координат штанги. Составляющая θ •В проявляется в измерительном канале как ложный сигнал приращения. Например, при ориентации штанги осью 1 вдоль однородного поля
или Δ В11=θ 11В, Δ B21=θ 21B, Δ B31=θ 31В
Т.е. при выбранной ориентации штанги каждая компонента с неодинаковыми индексами ложного сигнала приращения, считываемого по прибору 12, пропорциональна своему элементу угловой погрешности дифференциального магнитометра. При глубокой отрицательной обратной связи (ОС) компенсационного канала (КК) компоненты 1 (КК1) величина

где COCKK - постоянная по магнитной индукции обмотки ОС преобразователя КК;
IOCKK - ток в цепи OCKK1;
VKK1 - напряжение на выходе КК1;
ROCKK1 - сопротивление цепи ОС КК1 (поз.10 на фиг.2).
Если на преобразователе измерительного канала 2 разместить дополнительную обмотку угловой коррекции с постоянной CУК и запитать ее с выхода КК1 через сопротивление поперечной связи R21 (поз.18 на фиг.2), то на вход преобразователя будет действовать поле угловой коррекции СУК Подбирая величину сопротивления поперечной связи и выбирая полярность поля угловой коррекции, можно скомпенсировать до нуля сигнал ложного приращения, например:
Подбирая величину сопротивления поперечной связи и выбирая полярность поля угловой коррекции, можно скомпенсировать до нуля сигнал ложного приращения, например:

Таким образом, условие компенсации не зависит от величины сигнала VKK1,. Из этого условия получим
где знак ± выбирается в зависимости от знака θ 21 так, чтобы правая часть была со знаком плюс. Аналогичные соотношения справедливы для остальных пяти боковых элементов матрицы неидентичности θ .
Здесь уместно показать ошибочность итогового результата, полученного в прототипе (Ю.В.Афанасьев и Р.Г.Скрынников, 1972 г., стр.67, выражение (6)) в сравнении с вышеприведенным соотношением. В наших обозначениях выражение (6) прототипа выглядело бы как
 .
.
Разумеется, для минимизации погрешностей дифференциального магнитометра компенсации только боковых элементов матрицы не идентичности недостаточно. Необходимо скомпенсировать и диагональные элементы ее. Причиной появления ненулевых диагональных элементов матрицы является неидентичность плеч продольной связи и, прежде всего, неидентичность постоянных обмоток в цепи продольной связи. Например, для компоненты 1 в цепи 11 (см. фиг.3) при отсутствии шунтирующих сопротивлений 21 и 22 имеем
где С’’ - значение постоянной по магнитной индукции обмотки обратной связи 24 компенсационного канала 1 в цепи продольной связи 11;
С’ - значение постоянной по магнитной индукции компенсационной обмотки 23 измерительного канала 1 в цепи продольной связи 11. Если обмотки 23 и 24 зашунтировать сопротивлениями 21 и 22, как изображено на фиг.2 и 3, то токи обмоток I’, I’’ будут различными и вышеприведенное соотношение изменится на другое
Отношением токов можно управлять величинами сопротивлений, показанных на фиг.3,
где R’, R’’ - значения сопротивлений обмоток 23 и 24, Ом;
R1, R2 - значения сопротивлений 23 и 24, Ом.
Очевидно, что, задавшись шунтирующим сопротивлением одного плеча, например сопротивление 22, и меняя шунтирующее сопротивление другого плеча, например сопротивление 21, можно свести элемент θ 11 к нулю, наблюдая и обращая в нуль приращение Δ В11. Аналогично сводят к нулю элементы θ 22 и θ 33, наблюдая и обращая в нуль приращения Δ B22 и Δ В33.
Для иллюстрации технического результата, обеспечиваемого заявляемым способом, с помощью системы автоматизации вычислений MatLab рассчитаны контрольные примеры. Штанга с трехкомпонентными преобразователями, характеризуемая матрицей неидентичности каналов
поворачивается на угол α вокруг своей оси 1 в поле Земли В, ось 1 расположена перпендикулярно полю Земли. Тогда в системе координат штанги поле выражается как  . Собственными шумами преобразователей, а также уходами нулей компенсационного и измерительного каналов пренебрегаем. При таких условиях вычислен размах ложного сигнала в измерительном канале, образующего порог чувствительности измерительного канала без минимизации и с минимизацией погрешностей при различной тщательности ориентации штанги. Результаты расчета сведены в таблицу.
. Собственными шумами преобразователей, а также уходами нулей компенсационного и измерительного каналов пренебрегаем. При таких условиях вычислен размах ложного сигнала в измерительном канале, образующего порог чувствительности измерительного канала без минимизации и с минимизацией погрешностей при различной тщательности ориентации штанги. Результаты расчета сведены в таблицу.
Результаты расчетного эксперимента свидетельствуют, что заявляемый способ позволяет существенно снизить порог чувствительности дифференциального магнитометра при измерении в движении на фоне магнитного поля Земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МИНИМИЗАЦИИ ПОГРЕШНОСТЕЙ В ПЕРЕНОСНОМ ДИФФЕРЕНЦИАЛЬНОМ МАГНИТОМЕТРЕ | 2003 |
|
RU2256930C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| Способ измерения приращения индукции магнитного поля дифференциальным магнитометром | 2021 |
|
RU2789143C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ ДИПОЛЬНОЙ МОДЕЛИ | 2010 |
|
RU2433420C1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2020 |
|
RU2747015C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| Устройство для компенсации помехВ ОбРАзцОВыХ MEPAX МАгНиТНОй иНдуКции | 1979 |
|
SU813338A1 |
Изобретение относится к области измерения приращения индукции магнитного поля. Способ включает измерение трех компонент приращения магнитной индукции между измерительным и компенсационным датчиками, наложение продольных резистивных связей между входами компенсационного и измерительного каналов каждой из измеряемых компонент, наложение поперечных резистивных связей между выходом компенсационного канала каждой из измеряемых компонент и входами измерительных каналов других компонент. Штангу с измерительным и компенсационным датчиками помещают в зону однородного магнитного поля, компоненты которого измеряют компенсационным каналом. Штангу дважды ориентируют по полю одной из осей координат измерительного и компенсационного преобразователей так, чтобы обратить две измеряемые компоненты магнитной индукции поля в нуль. Измеряют приращения магнитной индукции между измерительным и компенсационным датчиками. Определяют вектор-столбец уходов нулей измерительного канала. Осуществляют коррекцию уходов введением постоянных поправок. Штангу трижды ориентируют по полю так, чтобы обратить две измеряемые компоненты магнитной индукции поля в нуль, наблюдая вектор-столбцы приращений. Компенсируют до нуля компоненты приращений подбором сопротивлений соответствующей цепи поперечной резистивной связи и соответствующей цепи продольной резистивной связи. Технический результат - снижение порога чувствительности дифференциального магнитометра. 1 табл., 3 ил.
Способ минимизации погрешностей в дифференциальном магнитометре, включающий измерения трех компонент приращения магнитной индукции между измерительным и компенсационным датчиками, наложение продольных резистивных связей между входами компенсационного и измерительного каналов каждой из измеряемых компонент, наложение поперечных резистивных связей между выходом компенсационного канала каждой из измеряемых компонент и входами измерительных каналов других компонент, отличающийся тем, что штангу с измерительным и компенсационным датчиками помещают в зону однородного магнитного поля, например, магнитного поля Земли  компоненты которого измеряют компенсационным каналом, затем штангу дважды ориентируют по полю одной из осей координат измерительного и компенсационного преобразователей так, чтобы обратить две измеряемые компоненты магнитной индукции поля в нуль:
компоненты которого измеряют компенсационным каналом, затем штангу дважды ориентируют по полю одной из осей координат измерительного и компенсационного преобразователей так, чтобы обратить две измеряемые компоненты магнитной индукции поля в нуль:
измеряют приращения магнитной индукции между измерительным и компенсационным датчиками:
определяют вектор-столбец уходов нулей измерительного канала по формуле
и осуществляют коррекцию уходов введением постоянных поправок, представляющих собой -В10, -В20, -В30, затем штангу трижды ориентируют по полю так, чтобы обратить две измеряемые компоненты магнитной индукции поля в нуль:
при этом, наблюдая вектор-столбцы приращений
компенсируют до нуля каждую из компонент приращения Δ Bij(i,j=1,2,3,i≠j) подбором сопротивления соответствующей цепи поперечной резистивной связи, а каждую из компонент приращения Δ Bii(i=1,2,3) - подбором сопротивления соответствующей цепи продольной резистивной связи.
| US 5463318 A, 31.10.1995 | |||
| Компонентный дифференциальный магнитометр | 1978 |
|
SU739454A1 |
| Квантовый дифференциальный магнитометр | 1978 |
|
SU688884A1 |
| Дифференциальный магнитометр | 1984 |
|
SU1267307A1 |
| US 5990677 A, 23.11.1999 | |||
| US 6055477 A, 25.04.2000. | |||

