Изобретение относится к области измерительной техники и может быть использовано для измерений параметров магнитного поля (составляющих- вектора и градиента вектора магнитной индукции), например, в области геофизических и космических исследований,
Цель изобретения - повышение точности определения составляющей вектора магнитной индукции по оси выбранного направления и расширение функциональ- ных возможностей, заключающееся в определении ориентации магнитной оси магнитолувствителиного преобразователя относительно выбранного направления.
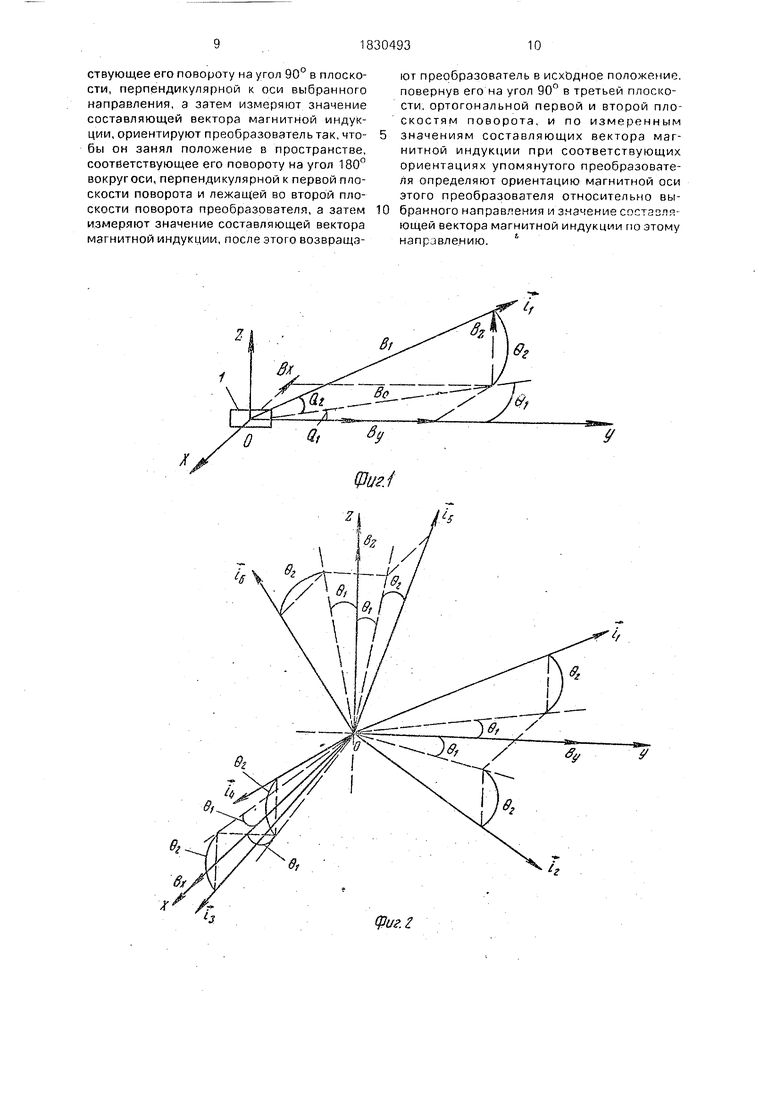
На фиг, 1 изображены магниточувстви- тельный преобразователь и ориентация его магнитной оси относительно направления оси OY декартовой системы координат OXYZ.
На фиг.2 изображены положения магнитной оси магниточувствительного преобразователя для измерения составляющих вектора магнитной индукции.
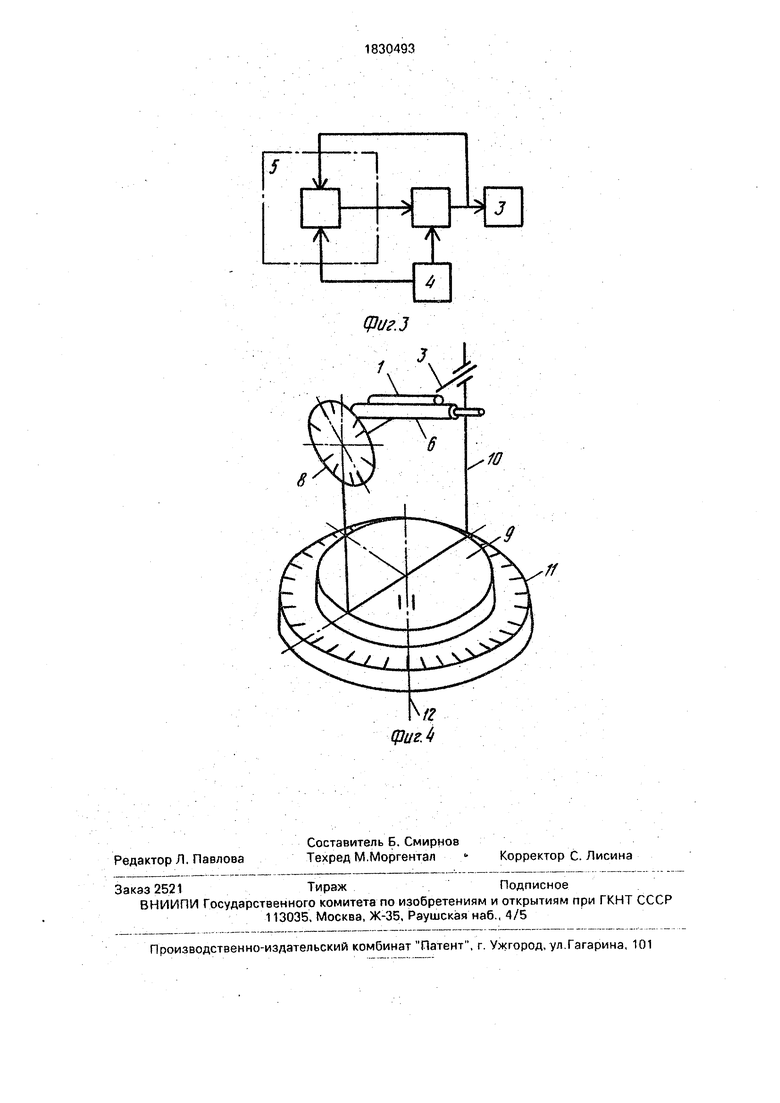
На фиг.З изображена структурная схема -устройства, реализующего способ определения составляющей вектора магнитной индукции по оси выбранного направления.
На фиг.4 показано объемное изображение поворотного устройства смэгниточувст- вительным -преобразователем, входящих в устройство, реализующее упомянутый способ.
Устройство для реализации предлагаемого способа состоит (CP-L фиг,1, 3, 4) из одно компонентного ма г ни то чувствительного, например, феррозондо вого преобразователя 1 (см, фиг.З), усилительно- преобразовательного блока 2, регистрирующего прибора 3, генератора переменной ЭДС 4 и поворотного устройства Б, например, теодолита, содержащего (см. фиг.4) оптическую трубу 6, горизонтальную ось 7, вертикальный круг 8 с нанесенными рисками угловых единиц, горизонтальный вращающийся круг 9, вилку теодолита 10, неподвижный горизонтальный круг 11 с нанесенными рисками угловых единиц, вертикальную ось 12, жестко связанную с кругом 11. При этом теодолит 5 выполнен мз немагнитного материала, а феррозонд 1 расположен на оптической трубе 6 так, что .его геометрическая ось параллельна оси трубы 6. Выход феррозонда 1 (см. фиг.З) подключен к первому входу блока 2, выход блока 2 подключен ко входу регистрирующего прибора 3 и первому входу феррозонда 1, а выходы генератора 4 подключены ко второму входу феррозонда 1 и ко второму входа блока 2. Оптическая труба 6 установлена на
горизонтальной оси 7, которая жестко связана с вертикальным кругом 8. Ось 7 расположена на вилке теодолита 10 с возможностью вращения на 360°, поэтому вертикальный
круг 8 и труба 6 с феррозондом 1 могут вращаться в вертикальной плоскости на 360°. Вилка теодолита 10 жестко связана с горизонтально вращающимся кругом 9, выполненным с возможностью вращения на
360° вокруг оси 12.
Заявляемый способ реализуется посредством предлагаемого устройства следующим образом.
На второй вход феррозонда 1 (см. фиг.З)
подается с генератора 4 переманная ЭДС, возбуждающая этот феррозонд. В результате этого на выходе феррозонда 1 появляется ЭДС второй гармоники, пропорциональная проекции вектора магнитной индукции на
магнитную ось феррозонда 1 (Ю.В.Афанасьев. Феррозондовые приборы. Л., Энерго- .ато миздат, 1906, с. 66). Выходной сигнал с феррозонда 1 усиливается и детектируется в блоке 2, а затем подается на первый вход
феррозонда 1, что обеспечивает отрицательную обратную связь по измеряемой составляющей вектора магнитной индукции. При этом блок-2 состоит из избирательного усилителя, синхронного детектора и интегратора. Выходной сигнал с. блока 2; пропорциональный измеряемой составляющей сектора магнитной индукции, соответствующий проекции вектора магнитной индукции на. магнитную ось феррозонда Г, подается
на регистрирующий прибор 3.
Для определения составляющей вектора магнитной индукции по выбранному на- празленмю предварительно ориентируют по этому направлению трубу 6 (см. фиг.4),
поворачивая ее в вертикальной плоскости вокруг оси 7 и в горизонтальной плоскости вместе с вилкой теодолита 10. Ориентацию оптической трубы 5, например, определяют по значениям углов из горизонтальном круге 11 и на вертикальном круге 8, Предположим, что труба 6 (см. фиг.4) и геометрическая ось феррозонда.Т (см. фиг.1, 2) ориентированы по оси QY декартовой системы координат OXYZ, Угол между проекцией магнитной
оси И на плоскость XQY и направлением оси OY обозначен через г, а угол между проекцией магнитной оси И на плоскость XOY и направлением этой оси обозначен через ft. Углы в и В) определяют ориентацию магнитной оси феррозонда относительно выбранного направления оси OY, Составляющая - вектора магнитной индукции В, измеренная е помощью феррозонда 1,-будет иметь следующее значение
В1 By cos 0i cos ft - Bx sin 01 cos ft +65 Вг cos 01 cos ft + By sin 01 cos ft
+ Bz sin ft,- Bx sin ft.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО ОБЪЕМНОГО ИЗМЕРЕНИЯ ВЕКТОРНОЙ ФУНКЦИИ МАГНИТНОЙ ИНДУКЦИИ НЕОДНОРОДНО РАСПРЕДЕЛЕННОГО В ПРОСТРАНСТВЕ И ПЕРИОДИЧЕСКИ ИЗМЕНЯЮЩЕГОСЯ ВО ВРЕМЕНИ МАГНИТНОГО ПОЛЯ | 2012 |
|
RU2490659C1 |
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНЫХ ФЕРРОЗОНДОВЫХ МАГНИТОМЕТРОВ | 2022 |
|
RU2793283C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2247942C1 |
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| ФЕРРОЗОНД | 1973 |
|
SU368559A1 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
| ФЕРРОЗОНДОВЫЙ АЭРОМАГНИТОМЕТР | 1991 |
|
RU2019860C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2236029C1 |
Применение: измерительная техника, в частности для измерения параметров магнитного поля в области геофизических и космических исследований.Суть изобретения: способ определения составляющей вектора магнитной индукции по оси выбранного направления основан на ориентации оси магниточувствительного преобразователя по упомянутому направлению и измерении выходного сигнала этого преобразователя, пропорционального измеряемой составляющей вектора магнитной индукции, ориентации магниточувстви- тепьного преобразователя так, чтобы он занял положение в пространстве, соответствующее его повороту на угол 180° вокруг оси выбранного направления и после завер- шенил ориентации магниточувствительного преобразователя измерении значения составляющей вектора магнитной индукции; ориентации преобразователя, чтобы он занял положение в пространстве, соответствующее его повороту на угол 90° в любой плоскости, проходящей через ось выбранного направления, а затем измерении значения составляющей вектора магнитной индукции; ориентации преобразователя, чтобы он занял положение в пространстве, соответствующее его повороту на угол 180° вокруг оси, перпендикулярной выбранному направлению и лежащей в плоскости поворота преобразователя, а затем измерении значения составляющей вектора магнитной индукции; вновь ориентации преобразователя так, чтобы он занял положение в пространстве, соответствующее его повороты на угол 90° в плоскости, перпендикулярной оси выбранного направления, а затем измерении значения составляющей вектора магнитной индукции; ориентации преобразователя так, чтобы он занял положение в пространстве, соответствующее его повороту на угол 180° вокруг оси, перпендикулярной первой плоскости поворота и лежащей во второй плоскости поворота преобразователя, а затем измерении значения составляющей вектора магнитной индукции; после этого возвращении преобразователя в исходное положение, повернув его на угол 90° в третьей плоскости, ортогональной первой и второй плоскости поворота, и по измеренным значениям составляющих вектора магнитной индукции при соответствующих ориентациях упомянутого преобразователя определении значений трех ортогональных составляющих вектора магнитной индукции, две из которых перпендикулярны выбранному направлению, и ориентации магнитной оси этого преобразователя относительно выбранного направления. 4 ил. (Л 00 со
где By - значение составляющей вектора магнитной функции по оси выбранного направления OY;
Вх - значение составляющей вектора магнитной индукции по оси ОХ;
Bz - значение составляющей вектора магнитной индукции по оси OZ.
Повернем трубу 6 (см. фиг.4), а вместе с ней и феррозонд 1 в плоскости XOY на угол 180°, а затем повернем трубу 6 с феррозондом 1 в плоскости YOZ на угол 180°. В этом случае магнитная ось феррозонда 1 будет иметь положение h (см. фиг.2), что соответствует повороту феррозонда 1 (см, фиг. 1) на угол 180° вокруг оси OY. Составляющая вектора магнитной индукции В2, измеренная с помощью феррозонда 1, в этом случае будет иметь значение
В2 By COS 01 COS ft + Вх Sin 01 COS ft - Bz sin ft.
Повернем трубу 6 (см. фиг.4) с феррозондом 1 в плоскости XOY на угол 90°. В этом случае магнитная ось феррозонда 1 будет иметь положение Тз (см. фиг.2), а составляющая вектора магнитной индукции Вз, измеренная с помощью феррозонда, будет иметь значение
: Вх cos 01 cos ft - By sin 01 cos ft - - Bz sin ft.
Вз
Повернем трубу 6 (см. фиг.4) с феррозондом 1 в плоскости XOZ на угол 180°, а затем повернем трубу б с феррозондом 1 в плоскости XOY на угол 180°. В этом случае магнитная ось феррозонда будет иметь положение 14 (см. фиг.2), что соответствует повороту феррозонда 1, когда его магнитная ось имела ориентацию Тз на угол 180° вокруг оси ОХ. В этом случае составляющая вектора магнитной индукции, измеренная с помощью феррозонда, будет иметь значение
В4
44 Вх COS 01 COS ft + By Sin 01 COS ft +
Bz sin ft.
Повернем трубу 6 (см. фиг.4) с феррозондом 1 в плоскости XOZ на угол 90°. В этом случае магнитная ось феррозонда 1 будет иметь положение is (см. фиг.2), а составляющая вектора магнитной индукции Bs. измеренная с помощью феррозонда, будет иметь значение
Повернем вилку теодолита 10 (см. фиг.4) с трубой 6 и феррозондом 1 вокруг вертикальной оси 12 на 180°. В этом случае магнитная ось феррозонда 1 будет иметь положение б (см. фиг.2), а составляющая вектора магнитной индукции Be, измерен- ная с помощью феррозонда будет иметь значение
15
Be Bz cos ft cos ft - By sin #1 cos ft + + BX sin ft.
Затем, повернув оптическую трубу 6 (см. фиг,4) с феррозондом 1 вокруг горизонтальной оси 7 (в плоскости УО) на 90°, вернем эту трубу б с феррозондом 1 в исходное поло- жение, при этом магнитная ось феррозонда 1 займет положение И (см. фиг.2).
Решая систему уравнений для ВтВб
определим неизвестные параметры из следующих выражений:
01 arctg(Bi + 82 + Вз + 64)1 х х(В2-Bi + В4-Вз);
30
02 агсхд{(Вз + 64) x
х Be- Bs + (Bi + 82) sm
Вх - (Вз + B4) sec 0i sec ft:
351
By -x- (81 + 62) se c 0i sec ft;
40
Bz -y (85 + Be) sec 0i sec ft.
Углы 0i и ft определяют ориентацию магнитной оси h (см. фиг. 1) феррозонда 1 относительно выбранного направления по оси OY.
Таким образом, предполагаемое техническое решение обеспечивает определение составляющей вектора магнитной индукции по оси выбранного направления и двух составляющих вектора магнитной индукции,
ортогональных этому направлению, исключая влияние поперечных полей на результат измерения, вызванных непараллельностью магнитной оси магниточувствительного преобразователя относительно оси выбранного направления измерения. Кроме того, предлагаемый способ обеспечивает определение ориентации магнитной оси преобразователя относительно выбранного направления.
Для реализации предлагаемого способа может быть использован магнитометр, состоящий из феррозонда, усилительно-преобразовательного блока, регистрирующего прибора и генератора переменной ЭДС, включенных по схеме на фиг.З. Поворотное устройство 5 (см. фиг.З) может быть выполнено на базе теодолита ТТ-2, у которого разрешающая способность по углу поворота составляет ±2. При этом однокомпонен- тный феррозонд располагает на оптической трубе теодолита как и в известном устройстве.
Предлагаемый способ по сравнению с известными техническими решениями, в частности, аналогом и прототипом обеспечивает определение составляющей вектора магнитной индукции по оси выбранного направления, исключая погрешность измерения этой составляющей, обусловленную в известных способах влиянием поперечного магнитного поля из-за погрешности ориентации магнитной оси магниточувствительного преобразователя по выбранному направлению, что более чем на порядок повышает точность измерения составляющей вектора магнитной индукции по оси выбранного направления. Кроме того, предлагаемый способ по сравнению с известными техническими решениями обеспечивает с высокой точностью (более чем на порядок) определение двух взаимно ортогональных составляюа х вектора магнитной индукции, перпендикулярных выбранному направлению, и определение ориентации магнитной оси магниточувствительного преобразователя относительно выбранного направления.
Известные способы решают задачу измерения трех взаимно ортогональных составляющих вектора магнитной индукции. Однако эти способы не обеспечивают с требуемой в настоящее время точностью определение составляющей вектора магнитной индукции по выбранному произвольно направлению и определение двух взаимно ортогональных составляющих этого вектора, перпендикулярных выбранному направлению. Это обусловлено тем, что известные способы не обеспечивают решение задачи ориентации магнитной оси магниточувствительного преобразователя относительно выбранного направления. За направление магнитной оси преобразователя в известных технических решениях, также как и в известном способе определение угла склонения и наклонения магнитного поля, принимают направление геометрической оси преобразователя или считают, что магнитная ось параллельна оси оптической трубы
теодолита. Это приводит к существенной погрешности измерения составляющей век.тора магнитной индукции, В известной работе показано, что смещение магнитной оси
может составлять примерно ±0,5° относительно выбранного направления измерения. Результаты пусконаладочных работ магнитометрической аппаратуры свидетельствуют о том, что угол между магнитной
0 осью феррозонда и его геометрической осью составляет до ±2,5°, что приводит к погрешности измерения составляющих вектора магнитной индукции, перпендикулярных, например, вектору геомагнитного поля
5 6 Ю4 нТл, в пределах до ±2617 нТл. Предлагаемый способ исключает эту погрешность измерения, что повышает точность определения составляющей вектора магнитной индукции по выбранному направле0 нию.
Фор мула изобретен и.я Способ определения составляющей вектора магнитной индукции по оси выбранного направления, заключающийся в изме5 нении пространственной ориентации оси магниточувствительного преобразователя относительно упомянутого направления и измерении выходного сигнала этого преобразователя пропорционально измеряемой
0 составляющей вектора магнитной индукции, отличающийся тем, что, с целью повышения точности определения состав- ляющей вектора магнитной индукции по оси выбранного направления и определения
5 ориентации магнитной оси магниточувствительного преобразователя относительно выбранного направления, ориентируют маг- ниточувствительный преобразователь так, чтобы он занял положение в пространстве,
0 соответствующее его повороту на угол 180° вокруг оси выбранного направления, и после завершения ориентации магниточувствительного преобразователя измеряют значение составляющей вектора магнитной
5 индукции,, после этого ориентируют преобразователь так, чтобы.он занял положение в пространстве, соответствующее его повороту на угол 90° в любой плоскости, проходящей через ось выбранного направления,
0 а затем измеряют составляющую вектора магнитной индукции; потом ориентируют преобразователь так, чтобы занял положение в пространстве, соответствующее его повороту на угол 180° вокруг оси, перпен5 дикулярной выбранному направлению и лежащей в плоскости поворота преобразователя, а затем измеряют значение составляющей вектора магнитной индукции, вновь ориентируют преобразователь так, чтобы он занял положение в пространстве, соответствующее его повороту на угол 90° в плоскости, перпендикулярной к оси выбранного направления, а затем измеряют значение составляющей вектора магнитной индукции, ориентируют преобразователь так, чтобы он занял положение в пространстве, соответствующее его повороту на угол 180° вокруг оси, перпендикулярной к первой плоскости поворота и лежащей во второй плоскости поворота преобразователя, а затем измеряют значение составляющей вектора магнитной индукции, после этого возвращаZ
0
ют преобразователь в исходное положение, повернув его на угол 90° в третьей плоскости, ортогональной первой и второй плоскостям поворота, и по измеренным значениям составляющих вектора магнитной индукции при соответствующих ориентациях упомянутого преобразователя определяют ориентацию магнитной оси этого преобразователя относительно выбранного направления и значение составляющей вектора магнитной индукции по этому направлению.
фиг. 2
Г
L.
Л.
i
i
J
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Афанасьев Ю.В., Студенцов Н.В., Щелкин А.П | |||
| Магнитометрические преобразователи, приборы, установки | |||
| Л.: Энергия, 1972, с | |||
| Кулиса для фотографических трансформаторов и увеличительных аппаратов | 1921 |
|
SU213A1 |
