Изобретение относится к области механизации уборки посадочного материала из почвы и предназначено для использования в табаководстве и овощеводстве.
Известны машины для уборки различных сельскохозяйственных культур путем теребления. Одним из основных рабочих органов этих машин является теребильный механизм, который состоит из бесконечной цепи с захватами. При движении машины захваты извлекают за ботву подкопанные, например, корнеплоды, из почвы и подают их к следующему рабочему органу для соответствующей технологической обработки. Для улучшения условий попадания ботвы в захваты машины снабл ;ены специальными ботвоподъемникамн, которые формируют в вертикальпый пучок листья, лежащие па земле и растущие в стороны.
Однако для теребления рассады табака из парников подобпые теребильные механизмы прнменить нельзя по следующим причинам.
По существующей агротехнике возделывания рассады табака в парниках его семеня сеют сплошным способом с довольно большой нормой высева. Поэтому посевы получаются густые. В силу биологических особенностей лнстья рассады табака, имея относительно большую поверхность, растут не вверх, а в стороны, перекрывая друг друга, В результате этих двух причин в фазе зрелостн лиственная часть растений, смыкаясь, образуег сплошной плотный ковер.
Чтобы произвести тереб,ление наиболее развитых из общей массы растений, листья которых перекрывают Друг друга, необходпмо, вопервых, отделить растения, подлежащие тереб,дению, а во-вторых, нулсно, чтобы теребильный рабочий орган отделил листья этих
растений от листьев подгона и захватил их.
С целью улучщения условий захвата растений, в предлагаемой машине общая масса растений разделяется на узкие рядки с подъемом листьев в вертикальное положение
листоподъемниками, во внутренние полости которых в разомкнутом состоянии входят захваты. Последние, смыкаясь, через вырезы в боковых стенках стеблеподъемников защемляют наиболее рослые растения, заключенные
в пространство между ними.
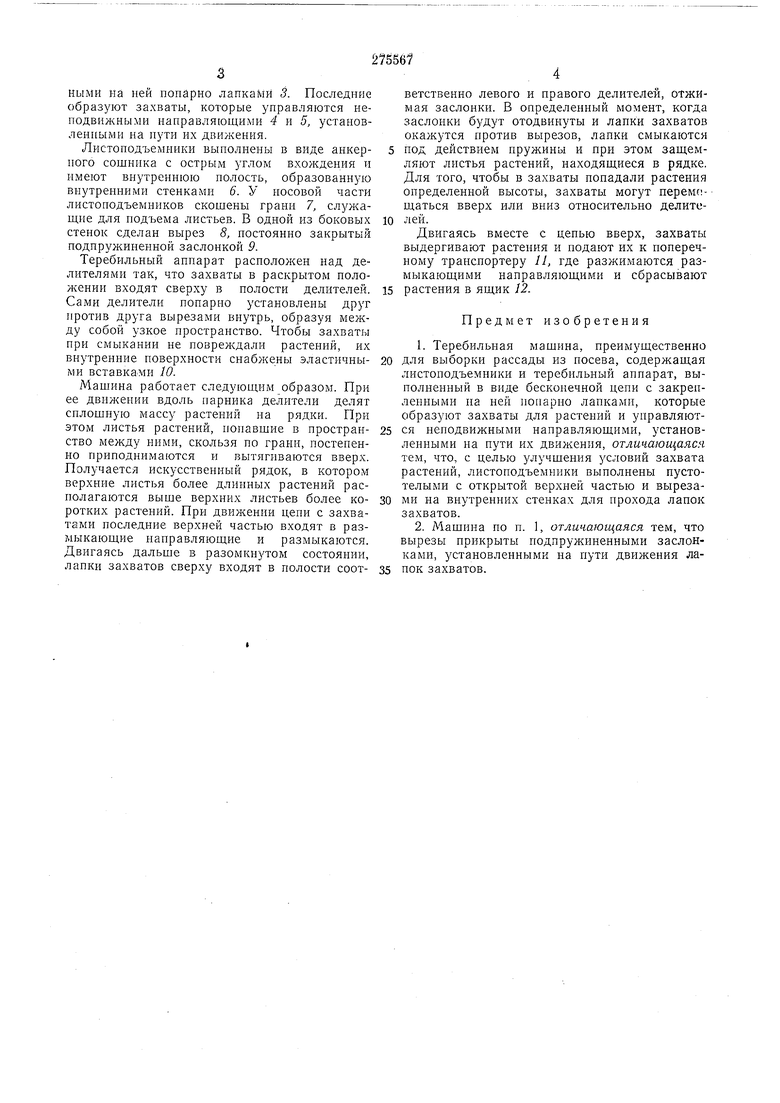
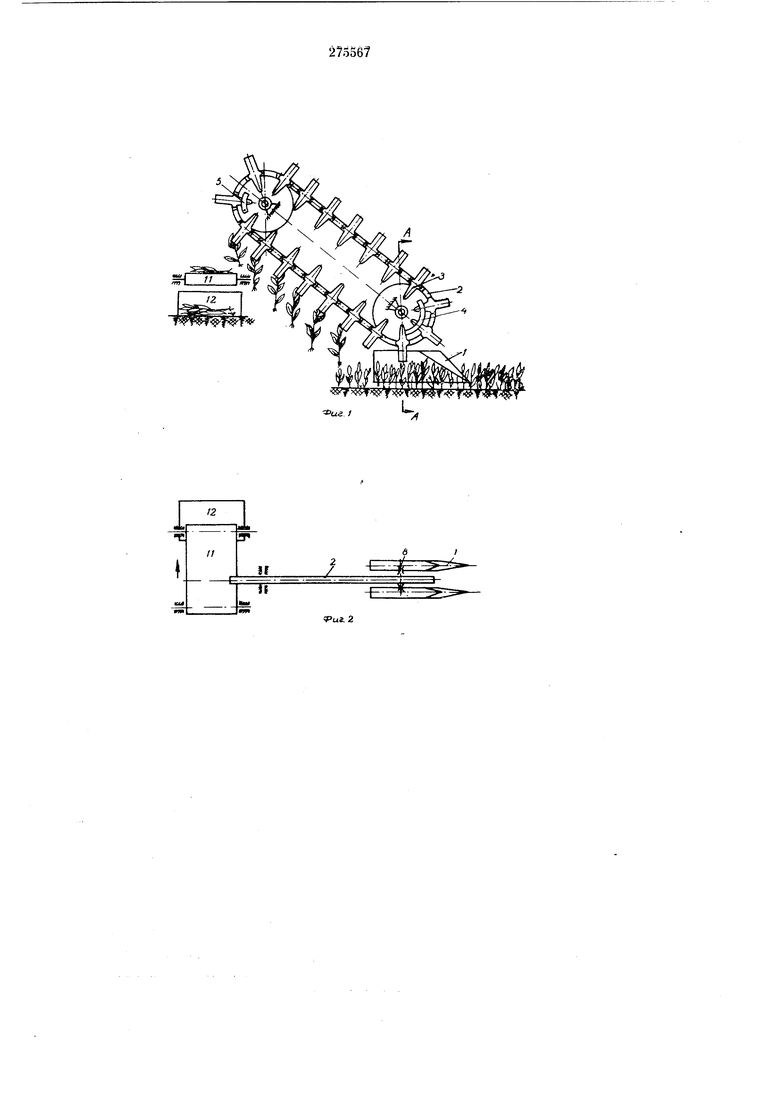
На фиг. I дана принцнпиальпая схелш описываемой мащпны, впд сбоку; на фиг. 2 - то же, вид в плане; на фиг. 3 схематически показано положение захватов при заходе в
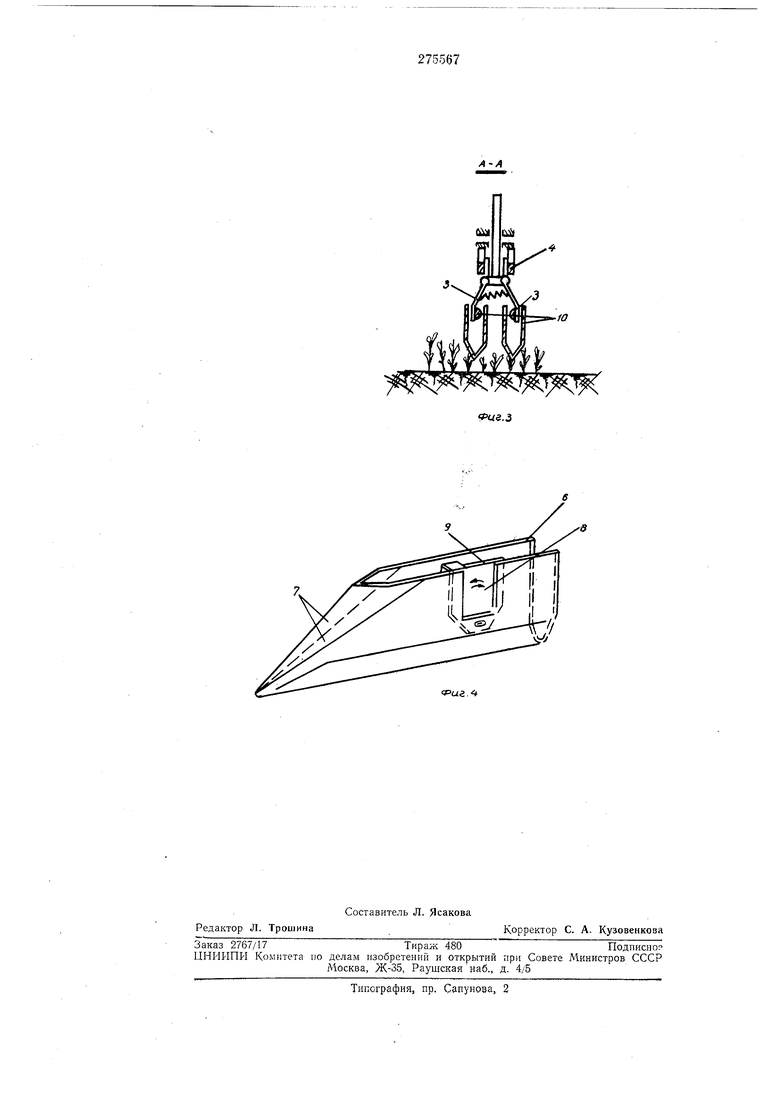
делители, разрез по А -А фиг. 1; на фиг. 4- представлена конструктивная схема делителя листоподъемника.
ными на ней попарно лапками 3. Последние образуют захваты, которые управляются неподвижными направляющими 4 и 5, установленнь ми на пути нх движения.
Листоподъемники выполнены в виде анкерного сошника с острым углом вхождения и имеют внутреннюю полость, образованную внутренними стенками 6. У носовой части листоподъемников скошены грани 7, служаш,не для подъема листьев. В одной из боковых стенок сделан вырез 8, ностоянно закрытый подпружиненной заслонкой 9.
Теребильный аннарат расноложен над делителями так, что захваты в раскрытом положении входят сверху в нолости делителей. Сами делители нонарно установлены друг против друга вырезами виутрь, образуя между собой узкое пространство. Чтобы захваты при смыкании не повреждали растений, их внутренние поверхности снабжены эластичными вставка ми 10.
Машина работает следующим образом. При ее движении вдоль парника делители делят снлошную массу растений на рядки. При этом листья растеннй, попавшие в пространство между ннми, скользя по грани, постененно ириноднимаются и вытягиваются вверх. Получается искусственный рядок, в котором верхние листья более длинных растений раснолагаются выше верхних листьев более коротких растений. При непи с захватами носледние верхней частью входят в размыкающие направляющие и размыкаются. Двигаясь дальше в разомкнутом состоянии, лапки захватов сверху входят в полости соответственно левого и правого делителей, отжимая заслонки. В определенный момент, когда заслонки будут отодвинуты и лапки захватов окажутся против вырезов, лапки смыкаются иод действием нружины и при этом защемляют листья растений, находящиеся в рядке. Для того, чтобы в захваты ноиадали растения определенной высоты, захваты могут перемещаться вверх или вниз относительно делителей.
Двигаясь вместе с ценью вверх, захваты выдергивают растения и подают их к поперечному транспортеру П, где разжимаются размыкающими направляющими и сбрасывают
растения в ящик 12.
Предмет изобретения
1.Теребильная мащина, преимущественно для выборки рассады из носева, содержащая
лнстоподъемники и теребильный аппарат, выполненный в виде бесконечной цепи с закрепленными на ней попарио лапками, которые образуют захваты для растений и управляются ненодвижными направляющими, установленными на нути их движения, отличающаяся тем, что, с целью улучшения условий захвата растений, листонодъемники выполнены нустотелымн с открытой верхней частью и вырезами на внутренних стенках для прохода ланок захватов.
2.Машина по н. 1, отличающаяся тем, что вырезы прикрыты подпружиненными заслонками, установленными на пути движения лапок захватов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Теребильный аппарат корнеплодоуборочной машины | 1984 |
|
SU1184458A1 |
| Теребильный аппарат корнеплодоуборочной машины | 1981 |
|
SU1001890A1 |
| Устройство для теребления сельскохозяйственных культур | 1982 |
|
SU1034639A1 |
| Устройство для теребления сельскохозяйственных культур | 1983 |
|
SU1109083A2 |
| ТЕРЕБИЛЬНЫЙ АППАРАТ К КОРНЕПЛОДОУБОРОЧНЫММАШИНАМ | 1971 |
|
SU298287A1 |
| Ботвоудаляющий аппарат | 1951 |
|
SU95720A1 |
| Способ уборки корнеплодов и устройство для его осуществления | 1985 |
|
SU1382433A1 |
| КОМБИНИРОВАННАЯ МАШИНА ДЛЯ УБОРКИ КАПУСТЫ И КАРТОФЕЛЯ | 1933 |
|
SU38371A1 |
| Теребильный аппарат корнеплодоуборочной машины | 1981 |
|
SU1256712A1 |
| СПОСОБ ОТДЕЛЕНИЯ БОТВЫ ОТ КОРНЕКЛУБНЕПЛОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2090041C1 |
5Раг
