Изобретение относится к области медицины - протезостроения, в частности к устройствам для тренировки оператора и исследования динамики биоэлектрического управления протезом.
Известные устройства указанного назначения содержат ряд каналов, включающих в себя усилитель биопотенциалов, блок выделения огибающей и индикаторный нрибор, в качестве которого может быть использован, например, электронно-онтический индикатор.
При тренировке оператора и исследовании динамики биоэлектрического управления нротезом с помощью известных устройств перед онератором ставится предметная задача, выполнение которой воз.можно только при условии подачи биоэлектрических сигнало ; с различных управляющих мышц в необходимых соотношениях. Такой нредметной задачей может служить, например, координированное неремещение луча на экране индика орного прибора с помощью биопотенциалов мышц. При использовании известных устройств для управления безынерционными механизмами возникают трудности. Они обусловлены тем, что электрическая активность мышц имеет флюктуационный характер, и для облегчения плавного неремещения луча необходимо сглаживание электромиограммы (ЭМГ) с помощью интегрирующей цепочки. При этом подобрать постоянную времени интегрирования нрн управлении быстроменяющимися процессами оказывается практически невозможным: при небольшой ностоянной времени система становится непригодной для слежения, вследствие непрерывных колебаний луча, а при большой - вследствие чрезмерной инерционности. Тем самым возникают трудности для быстрого овладения навыком координированного управления протезом.
Предлагаемое устройство лишено указанных недостатков. Это достигается тем, что в каждом канале устройства установлен включенный на выходе усилителя амплитудный детектор, выходные сигналы которого поступают на частотно-имнульсный амплитудный преобразователь, нагруженный на блок выделения огибающей. Указанные элементы устройства позволяют преобразовать флюктуирующие
биоэлектрические сигналы в имнульсь,, частота которых пропорциональна среднему значению сигнала, при этом диапазон частот преобразовапия выбирается таким, чтобы не передавались высокочастотные составляющие.
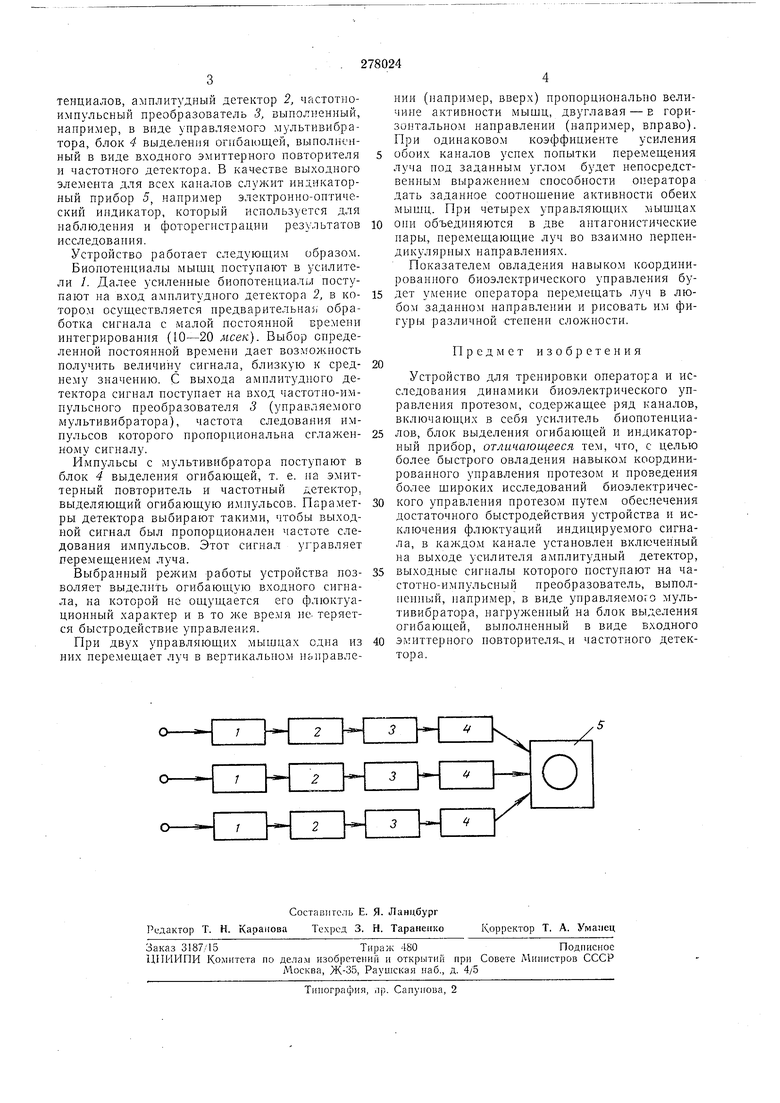
Тем самым обеспечивается управление перемещением луча без заметной инерционности. На чертеже изображена блок-схема предлагаемого устройства. Оно содержит ряд каналов, в каждом из которых установлены соедитенциалов, амплитудный детектор 2, частотноимпульсный преобразователь 3, выполиен)1ый, например, в виде управляемого мультивибратора, блок 4 выделения огибаюихей, выполненный в виде входного эмиттерного повторителя и частотного детектора. В качестве выходного элемента для всех каналов служит ин:1,икаторный прибор 5, например электронно-оптический индикатор, который используется для наблюдения и фоторегистрации результатов исследования.
Устройство работает следующим образом.
Биопотенциалы мышц поступают в усилители /. Далее усилепные биопотенциалы поступают на вход амплитудного детектора 1, в котором осуществляется предварительна} обработка сигнала с малой постоянной времени интегрирования (10-20 лгсе/с). Выбор определенной постоянной времени дает возможность получить величину сигнала, близкую к среднему значению. С выхода амплитудного детектора сигнал поступает на вход частотно-импульсного преобразователя 3 (управляемого мультивибратора), частота следования импульсов которого пропорциональна сглаженному сигналу.
Импульсы с мультивибратора поступают в блок 4 выделения огибающей, т. е. па эмиттерный повторитель и частотный детектор, выделяющий огибающую импульсов. Параметры детектора выбирают такими, чтобы выходной сигнал был пропорционален частоте следования импульсов. Этот сигнал управляет перемещением луча.
Выбранный режим работы устройства позволяет выделить огибающую входного сигнала, на которой не ощущается его флюктуационный характер и в то же время не. теряется быстродействие управления.
При двух управляющих мыщцах одна из них перемещает луч в вертикальном ньправлеНИИ (например, вверх) пропорциональпо величине активности мыщд, двуглавая - в горизонтальном направлении (например, вправо). При одинаковом коэффициенте усиления обоих каналов успех попытки перемещения луча под заданным углом будет непосредственным выражением способности оператора дать заданное соотнощение активности обеих мыщц. При четырех управляющих мыщцах они объединяются в две антагонистические нары, перемещающие луч во взаимно перпендикулярных направлениях.
Показателем овладения навыком координированного биоэлектрического управления будет умение онератора пере.мещать луч в любом заданном направлении и рисовать им фигуры различной стененп сложности.
Предмет изобретения
Устройство для тренировки оператора и исследования динамики биоэлектрического управления протезом, содержащее ряд каналов, включаюии-ix в себя усилитель биопотенциалов, блок выделения огибающей и индикаторный прибор, отличающееся, тем, что, с целью более быстрого овладения навыком координированного управления протезом и проведения более щироких исследований биоэлектрического управлепия протезом путем обеспечения достаточного быстродействия устройства и исключения флюктуации индицируемого сигнала, в каждом канале установлен включенный на выходе усилителя амплитудпый детектор,
выходные сигналы которого поступают на частотно-импульсный преобразователь, выполпеппый, например, в виде управляемого мультивибратора, нагруженный на блок выделения огибающей, выполнепный в виде входного
эмиттерного повторителя. и частотного детектора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления биоэлектрическим протезом | 1983 |
|
SU1220657A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ БИОЭЛЕКТРИЧЕСКИХ ПРОТЕЗОВ | 1967 |
|
SU198524A1 |
| УСТРОЙСТВО для миоФонии | 1969 |
|
SU234604A1 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| СПОСОБ КОРРЕКЦИИ НАРУШЕНИЙ ЗРЕНИЯ ПОСРЕДСТВОМ СОЗДАНИЯ БИОЛОГИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ И АППАРАТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2471453C1 |
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
| Активный протез нижней конечности с биоэлектрическим управлением | 1988 |
|
SU1731210A1 |
| Устройство для управления биоэлектрическими протезами верхних конечностей | 1980 |
|
SU936908A1 |
| Детектор сигнала в системах биоэлектрического управления протезами (его варианты) | 1984 |
|
SU1247008A1 |
