(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БИОЭЛЕКТРИЧЕСКИМИ ПРОТЕЗАМИ ВЕРХНИХ КОНЕЧНОСТЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
| Протез плеча | 1989 |
|
SU1666104A1 |
| Протез предплечья с биоэлектрическим управлением для детей | 1978 |
|
SU766594A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Устройство для управления протезами верхних конечностей | 1984 |
|
SU1333332A1 |
| Усилитель мощности для протезов с биоэлектрическим управлением | 1964 |
|
SU458315A1 |
| Устройство для управления биоэлектрическим протезом | 1983 |
|
SU1220657A1 |
| Устройство для управления биоэлектрическим протезом плеча | 1985 |
|
SU1344351A1 |
1
Изобретение относится к медицине, и может быть использовано в протезировании, протезостроении, а также для управления экзоскелетонами и манипуляторами.
Известно устройство для управления биоэлектрическими протезами, включающее блок выделения управляющих сигналов, содержащий два канала, каждый из которых состоит из последовательно соединенных датчика биопотенциалов, усилителя и интегратора, последовательно соединенные преобразователь мощности и исполнительный механизм и соединенные между собой формирователь и сигнальный датчик 1.
Однако при использовании этого устройства сила схвата недостаточна для удержания тяжелых предметов, а также невысока надежность удержания при взятии предметов пальцами из-за недостаточной силы дожатия пальцев протеза.
Цель изобретения - повышение надежности в работе.
Поставленная цель достигается тем, что в устройстве, включающем блок выделения управляющих сигналов, содержащий два канала, каждый из которых состоит из последовательно соединенных датчика биопотенциалов, усилителя и интегратора, последовательно соединенные преобразователь мощности и исполнительный механизм и соединенные между собой формирователь и сигнальный датчик, введены схема сравнения и последовательно соединенные тензодатчик, вход которого соединен с исполнительным механизмом и дополнительные усилитель и интегратор, при этом входы схемы сравнения подключены к интеграторам каждого канала и дополнительному интеграто10ру, соединенному с формирователем, а выход схемы сравнения подключен к преобразователю.
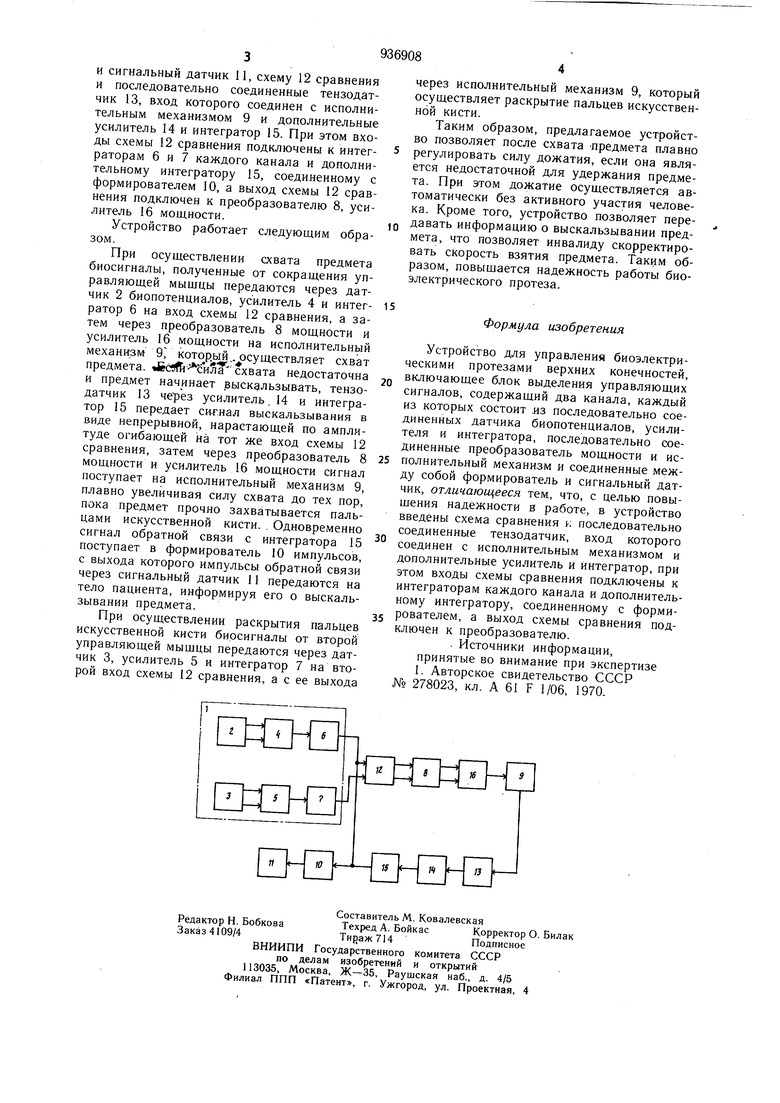
На чертеже представлена блок-схема устройства для управления биоэлектрическими протезами верхних конечностей.
15
Устройство для управления биоэлектрическими протезами верхних конечностей содержит блок 1 выделения управляющих сигналов, содержащий два канала, каждый из которых состоит из последовательно соеди20ненных датчиков 2 и 3 биопотенциалов, усилителей 4 и 5 и интеграторов 6 и 7, последовательно соединенные преобразователь 8 мощности и исполнительный механизм 9, соединенные между собой формирователь 10 и сигнальный датчик И, схему 12 сравнения и последовательно соединенные тензодатчик 13, вход которого соединен с исполнительным механизмом 9 и дополнительные усилитель 14 и интегратор 15. При этом входы схемы 12 сравнения подключены к интеграторам 6 и 7 каждого канала и дополнительному интегратору 15, соединенному с формирователем 10, а выход схемы 12 сравнения подключен к преобразователю 8, усилитель 16 мощности. Устройство работает следующим образом. При осуществлении схвата предмета биосигналы, полученные от сокращения управляющей мыщцы передаются через датчик 2 биопотенциалов, усилитель 4 и интегратор 6 на вход схемы 12 сравнения, а затем через преобразователь 8 мощности и усилитель 16 мощности на исполнительнь1Й механизм 9, который,, осуществляет схват ..-.- - предмета. схвата недостаточна и предмет начинает .выскальзывать, тензодатчик 13 через усилитель. 14 и интегратор 15 передает си-гнал выскальзывания в виде непрерывной, нарастающей по амплитуде огибающей на тот же вход схемы 12 сравнения, затем через преобразователь 8 мощности и усилитель 16 мощности сигнал поступает на исполнительный механизм 9, плавно увеличивая силу схвата до тех пор, пока предмет прочно захватывается пальцами искусственной кисти. . Одновременно сигнал обратной связи с интегратора 15 поступает в формирователь 10 импульсов, с выхода которого импульсы обратной связи через сигнальный датчик 11 передаются на тело пациента, информируя его о выскальзывании предмета. При осуществлении раскрытия пальцев искусственной кисти бирсигналы от второй управляющей мыщцы передаются через датчик 3, усилитель 5 и интегратор 7 на второй вход схемы 12 сравнения, а с ее выхода через исполнительный механизм 9, который осуществляет раскрытие пальцев искусственной кисти. Таким образом, предлагаемое устройство позволяет после схвата Предмета плавно регулировать силу дожатия, если она является недостаточной для удержания предмета. При этом дожатие осуществляется автоматически без активного участия человека. Кроме того, устройство позволяет передавать информацию о выскальзывании предмета, что позволяет инвалиду скорректировать скорость взятия предмета. Таким образом, повыщается надежность работы биоэлектрического протеза. Формула изобретения Устройство для управления биоэлектрическими протезами верхних конечностей, включающее блок выделения управляющих сигналов, содержащий два канала, каждый из которых состоит .из последовательно соединенных датчика биопотенциалов, усилителя и интегратора, последовательно соединенные преобразователь мощности и исполнительный механизм и соединенные между собой формирователь и сигнальный датчик, отличающееся тем, что, с целью повыщения надежности н работе, в устройство введены схема сравнения к последовательно соединенные тензодатчик, вход которого соединен с исполнительным механизмом и дополнительные усилитель и интегратор, при этом входы схемы сравнения подключены к интеграторам каждого канала и дополнительному интегратору, соединенному с формирователем, а выход схемы сравнения подключен к преобразователю. . Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 278023, кл. А 61 F 1/06, 1970.
