Изобретение относится к медицинекой технике, а именно к протезированию, протезостроению, и может быть использовано в многофункциональных протезах верхних конечностей.
Цель изобретения - повышение уп- равляемости протезом путем разделения чувствительных органов инвалида.
На фиг,1 приведена блок-схема устройства для управления биоэлектрическими протезами; на фиг,. - схема многопозиционного переключателя; на фиг,- 3 - пример расположения датчиков на теле инвалида; на фиг, 4 - пример расположения многопозиционного переключателя на креплении протеза.
Устройство содержит двухканальный блок 1 выделения управляющего сигна- ла, каждый канал которого содержит последовательно соединенные систему 2 съема биосигналов, усилитель 3, детектор 4, Выходы детекторов разной полярности, которые -выделяют огибаю- щие биосигналов, подключены к входам сумматора 5, вьтолненного, например, на операционном усилителе и подключенного к двухканальному импульсному преобразователю 6, включающему в себя мультивибраторы и усилитель мощности, выполненный по мостовой схеме. Преобразователь 6 через контакты 7 первого канала 8 коммутато- ра 9, вьтолненного, например, в ви- де блока нескольких реле 10, имеющих две группы контактов каждое, соединен с блоком 11 исполнительных механизмов, например электроприводов 12,
Устройство включает также много- позиционный переключатель 13 (фиг,2), который содержит несколько (в соответствии с количеством исполнительных механизмов 12)контактных площадок 14, установленных в корпусе 15, в котором также установлены движущийся шток 16 с закрепленным контактным элементом 17, На штоке 16 закреп л.ена также тяга 18 выборки, а на корпусе 13 - возвратная пружина 19, которая вторым концом пропущена через паз 20 корпуса 15 и закреплена на контактном элементе 17,
Контактный элемент 17 многопозиционного переключателя 13 соединен с источником 21 (фиг,1) питания, а контактные площадки 14 соответственно с элементами 10 коммутации бло
5
0 5 0 e
д 5 g
5
ка коммутатора 9, в качестве которых могут быть использованы, например, реле,., имеющие две пары независимых контактов, работающих на замыкание. Через одну пару контактов 7 первого канала 8 коммутатора 9 осуществляется связь преобразователя 6 с блоком 11 исполнительных механизмов. Через вторые пары контактов 22 второго канала 23 коммутатора 9 выход генератора 24 сигнала обратной связи соединен с входами датчиков 25, входящих в состав блока 26 датчиков обратной связи. Генератор 24 сигнала обратной связи может быть вьтолнен, например, в виде автоколебательного блокинг- генератора, в частотозадающей цепи которого установлено управляемое сопротивление, например полевой транзистор, выходное сопротивление которого, а следовательно, и период следования импульсов генератора, изменяются обратно пропорционально выходному сигналу сумматора,
Датчики 25 обратной связи установлены в гильзе протеза на. различных уровнях культи инвалида, как возможно дальше от электродов 2 отведения управляющих биопотенциалов (фиг,3), В случае применения в качестве гене- ратора 24 обратной связи блокинг-ге- нератора они представляют собой обычные поверхностные электроды, В случае применения вибратора в качестве генератора 24 сигнала обратной связи используют вибрационные датчики.
Многопозиционный переключатель 13 может быть установлен в любом удобном для инвалида месте, например в мекпопаточной области спины (фиг.4),
Устройство работает следующим образом.
Для подключения к системе управления того или иного исполнительного механизма 12 из блока II исполнительных механизмов инвалид перемещает тягу 18 (фиг,2) и вместе с ней кон- . тактный элемент 17 многопозиционного переключателя 13 на определенное расстояние незначительным напряжением мьшц, спины (или непротезируемой стороны туловища), подключая при этом к источнику 21 питания ту или иную контактную площадку 14 многопозицион-, ного переключателя 13,При этом срабатывает соответственное реле 10 из блока 9, замыкая соответственно свои пары контактов 7 и 22 и подключая к
14
преобразователю 6 соответственный электропривод 12, а к генератору 24 сигнала обратной связи - один из датчиков 25 блока 26 датчиков обратной связи. Так как генератор 24 работает в автоколебательном режиме, сигнал с его выхода через контакты 22 передается на соответственный датчик 25 блока 26 обратной связи. Ориенти- руясь на раздражение определенной зоны культи под соответствующим датчиком 25 из блока 26, инвалид контролирует правильность подключения нужного ему исполнительного механизма,
Например, подключение исполнительного механизма кисти осзпцествляется следующим образом. Перемещением гато- ка 16 с помощью тяги 18 (фиг,2) мно- гопозиционного переключателя 13 ин- валид замыкает контактный элемент 17 и первую контактную площадку I4 (фиг,2), подключая тем самым первое реле 10 из блока 9 коммутатора к источнику 21 питания. При этом сраба- тывает первая пара контактов 7 первого канала 8 коммутатора, подключая исполнительный механизм кисти из блока 1 1 к преобразователю 6, Одновременно срабатывает вторая пара контак тов 22 того же реле из блока 9, которая подключает генератор 24 сигнала обратной связи к первому Датчику 25 блока 26 датчиков обратной связи.
Поочередно сокращая управляющие
мьшщы кyльtи, инвалид посьшает биоэлектрические сигналы через электродную систему 2 съема биопотенциалов на усилители 3 и детекторы 4 раз- ной полярности, в сумматоре 5 сигналы от электродных систем разньпс каналов вычитаются и на его выходе появляется сигнал в виде разностной огибающей биосигналрв. Этот сигнал . передается в импульсный преобразователь 6, где преобразуется в серию им- .пульсов, частота и длительность которых изменяются в зависимости от амплитуды входного сигнала, Однрвре- менно сигнал с выхода сумматора 5 ; поступает в блок генератора 24 обратной связи, изменяя частоту следования импульсов блокинг-генератора,Таким образом по изменению раздрахе- НИИ кожи под соответствующим датчиком 25 инвалид получает информацию . о скорости движения исполнительного механизма, в случае подключения
40
им кисти - информацию о силе схвата пальцев кисти.
При изменении движения на управление ротацией предплечья инвалид перемещает тягу 18 многопозиционного переключателя 13 в положение, соот- ветствукнцее замыканию второй снизу пары элементов 17-14 (фиг,2), ориентируясь при этом на раздражение более высокой, по сравнению с зоной раздражения при подключении исполнительного механизма кисти, зоны культи под.соответствующим датчиком 25 (второй снизу на фиг.З), При этом к источнику 21 питания подключается второе реле 10 блока коммутатора 9. Первой парой контактов 7 этого реле подключается исполнительный механизм ротации предплечья из блока М исполнительных механизмов к импульсному преобразователю 6. Втброй парой контактов 22 второго реле 10 блока коммутатора 9 генератор 24 обратной свя зи соединяется с вторым датчиком 25 обратной связи блока 26. По раздражению кожи культи под этим датчиком инвалид получает информацию о подключении исполнительного механизма ротации предплечья.
Управление пронацией - супинацией предплечья осуществляется аналогично управлению схватом - раскрытием кисти, поочередным сокращением управляющих мыщц культи плеча. При этом информация о скорости перемещения исполнительного механизма ротации передается инвалиду изменением раздражения кожи под соответствующим .датчиком 25 (второй снизу на фиг.З),
При изменении движения на управление сгибанием-разгибанием в локтевом щарнире (или на любое другое движение инвалид перемещает тягу 18 многопозиционного переключателя 13, замыкая третью пару контактных элементов 17-14 (фиг,2). Далее работа устройства аналогична описанному выще,
Использование введенного генератора сигнала обратной связи, связанного с выходом сумматора и входами датчиков обратной связи, в совокупности с выбранным расположением их в гильзе протеза на различных уровнях, культи обеспечивает инвалиду непосредственную информацию о подключении определенного исполнительного механизма, а в процессе выполнения движения - информацию о скорости пеШаг. г
п
QUtS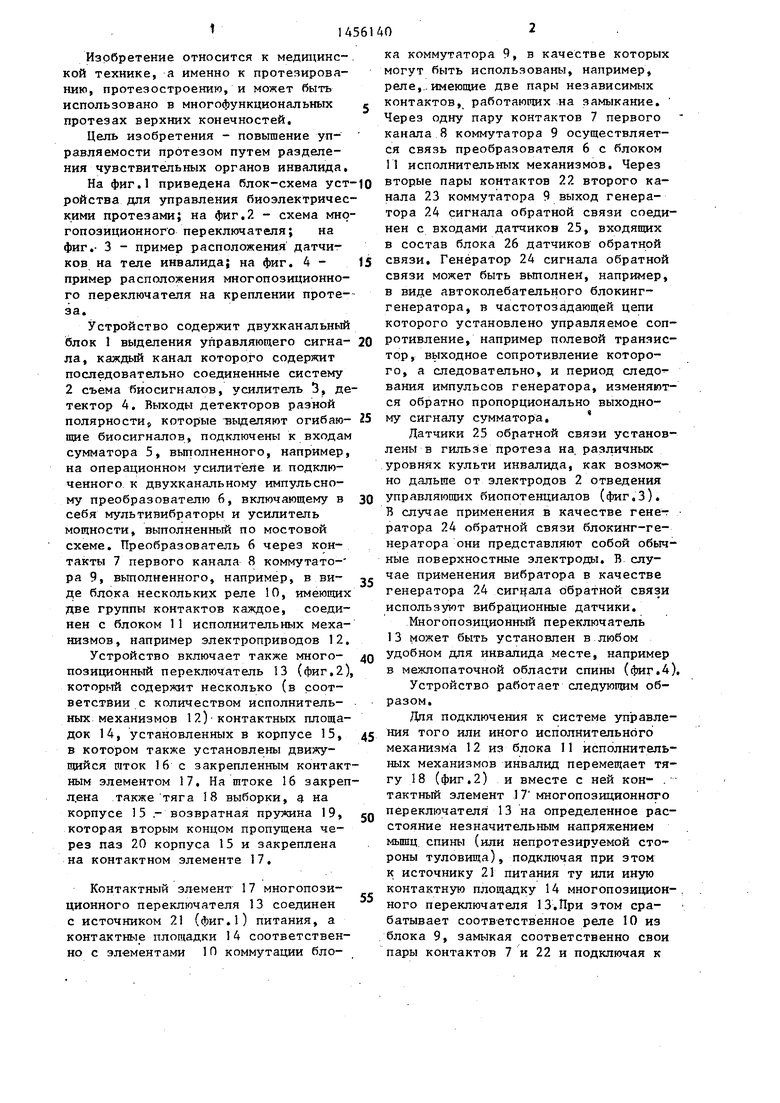


| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ НА РАСЩЕПЛЕННУЮ КУЛЬТЮ | 1993 |
|
RU2067852C1 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| Устройство для управления многофункциональным протезом | 1987 |
|
SU1475652A1 |
| Устройство для управления протезами верхних конечностей | 1984 |
|
SU1333332A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| Устройство для управления многофункциональным протезом | 1987 |
|
SU1475653A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Устройство для управления биоэлектрическим протезом | 1983 |
|
SU1220657A1 |
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 2010 |
|
RU2427349C1 |

| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
