Изобретение относится к про1езированню и приборостроению, а именно к многофункциональным протезам верхних конечностей.
Цель изобретения - упрощение и повышение надежности управления многофункциональным протезом.
На чертеже изображена структурная электрическая схема устройства.
Устройство для управления биоэлектрическим протезом содержит два канала 1 выделения управляющего сигнала, каждый из которых включает последовательно соединенные электродную систему 2, усилитель 3 и детектор 4, последовательно соединенные сумматор 5, входы которого подключены соответственно к выходам детекторов 4, преобразователь 6, блок 7 коммутации и блок 8 исполнительных механизмов, последовательно соединенные счетчик 9, дещифратор 10 и блок 11 счетных триггеров, выходы которого подключены соответственно к управляющим входам б.тока 7 коммутации, инвертор 12, элемент ИЛИ 13, формирователь 14 импульсов, к входу которого подключен кнопочный ключ 15, элемент 16 задержки, включенный между входом считывания дешифратора 10 и входом сброса счетчика 9, счетный вход которого соединен с входом сброса блока II счетных триггеров и с выходом формирователя 14 импульсов, ключ 17 питания и элемент 18 сброса, включенный между ключом 17 питания и выходом элемента 16 задержки, вход которого соединен с выходом элемента ИЛИ 13, первый вход которого подключен к выходу сумматора 5 и к входу инвертора 12, а второй вход - к выходу инвертора 12.
Предпочтительно выполнять сумматор 5 в виде дифференциального усилителя, преобразователь 6 - в виде двухканального импульсного преобразователя. Блок 8 исполнительных механизмов содержит несколько
электроприводов, - по числу ВЫПОЛНЯвдМЫХ
протезом функций (видов движений протеза), а блок 7 коммутации содержит систему реле, включенных своими контактами соответственно между выходами преобразователя 6 и входами электроприводов блока 8 исполнительных механизмов, причем управляющие обмотки реле подключены к выходам соответствующих триггеров блока 11 счетных триггеров. Кнопочный ключ 15 установлен в удобном для инвалида месте, например, в гильзе под торцом культи. Формирователь 14 импульсов может быть выполнен в виде ждущего мультивибратора. Электропитание устройства осуществляется от источника постоянного напряжения (не показан).
Устройство для управления биоэлектрическим протезом работает следующим образом.
При включении электропитания устройства ключом 17 питания срабатывает элемент
5
18 сброса, который устанавливает счетчик 9 в исходное состояние. При управлении протезом инвалид нажимает на кнопочный ключ 15 определенное количество раз, соответствующее коду выбранного вида движения протеза, и тем самым передает сигналы на формирователь 14 импульсов, с выхода которого импульсы, количество которых соответствует количеству нажа1ий на кнопочный ключ 15, поступают
О на вход счетчика 9, который устанавливается в определенное состояние, одновременно триггеры блока 11 счетных триггеров устанавливаются в исходное состояние. Например, при нажатии на кнопочный ключ 15 два раза счетчик 9 устанавливается в двоичное состояние «10,что соответствует десятичному коду «2« ротации кисти протеза. Эта информация поступает на дещифратор 10, который формирует соответствующий сигнал управления блоком
0 1 счетных триггеров. После этого устройство готово к выцолнению движения, которое осуществляется соответствующим электроприводом блока 8 исполнительных механизмов, например электроприводом механизма ротации кисти.
5
Для выполнения ротации кисти инвалид сокращает одну из управляющих мыщц, биопотенциалы которой проходят по одному каналу выделения управляющего сигнала, поступая через соответствующую электродную систему 2 на усилитель 3 и детектор 4, выделяющий биопотенциалы определенной полярности. Хотя инвалид сокращает одну управляющую мыщцу, биопотенциалы меньщей амплитуды обычно на водятся и на мыщце-антагонисте. Эти биопотенциалы противоположной полярности выделяются детектором 4 другого канала 1 выделения управляюплего сигнала. С выходов детекторов 4 сигналы в виде огибающих биопотенциалов разной полярности
0 подаются в сумматор 5, где вычитаются, и на его выходе появляется сигнал в виде разностной огибающей биопотенциалов, полярность которого зависит от cooTHOuje- ния амплитуд огибающих биопотенциалов управляющей мыщцы и мыщцы-антагониста.
С выхода сумматора 5 сигнал поступает в зависимости от его полярности или через инвертор 12, или непосредственно на соответствующий вход элемента ИЛИ 13, с выхода которого сигнал передается на вход
Q считывания дешифратора 10. Сформированный дешифратором 10 по коду, записанному в счетчике 9, сигнал управления вызывает срабатывание соответствующих триггеров блока 11 счетных триггеров, которые производят подключение (через контакты
5 реле блока 7 коммутации) к преобразователю 6 электроприводов механизма ротации кисти блока 8 исполнительных механизмов.
0
Одновременно с выхода сумматора 5 сигнал подается на вход преобразователя 6, в котором он превращается в серию импульсов с изменяющейся в соответствии с амплитудой входного сигнала, длительностью и частотой. При этом в зависимости от полярности поступающего сигнала работает один или другой канал преобразователя 6. Управляющие импульсы через замкнутые контакты реле блока 7 коммутации поступают на подключенный электропривод механизма ротации кисти, т. е. подключение исполнительного механизма к системе управления производится одновременно с приходом биопотенциалов управляющих мыщц.
С выхода элемента ИЛИ 13 сигнал через элемент 16 задержки поступает на вход сброса счетчика 9, который устанавливается в исходное состояние. При этом управление выбранным исполнительным механизмом может производиться как угодно долго до тех пор, пока инвалид не подаст нажатием на кнопочный ключ 15 новый сигнал
0
на переключение исполнительного механизма, который установит блок 1I счетных триггеров в исходное состояние.
Аналогично описанному производится управление другими движениями протеза. Для этого нажатием на кнопочный ключ 15 производится набор кода, соответствующего выбранному движению, в счетчик 9, а затем посредством биопотенциалов мыщц осуществляется управление этим движением.
Устройство для управления биоэлектрическим протезом благодаря разделению источников сигналов, работающих на переключение и на управление исполнительных механизмов, упрощает для инвалида процесс управления многофункциональным протезом, а следовательно, расширяет контингент инвалидов, которые могут использовать многофункциональные искусственные конечности. Тактильная чувствительность при кнопочном управлении способствует повышению на- дежности правильного подключения исполнительных механизмов к системе управления, что уменьшает количество ошибок при управлении протезом.
5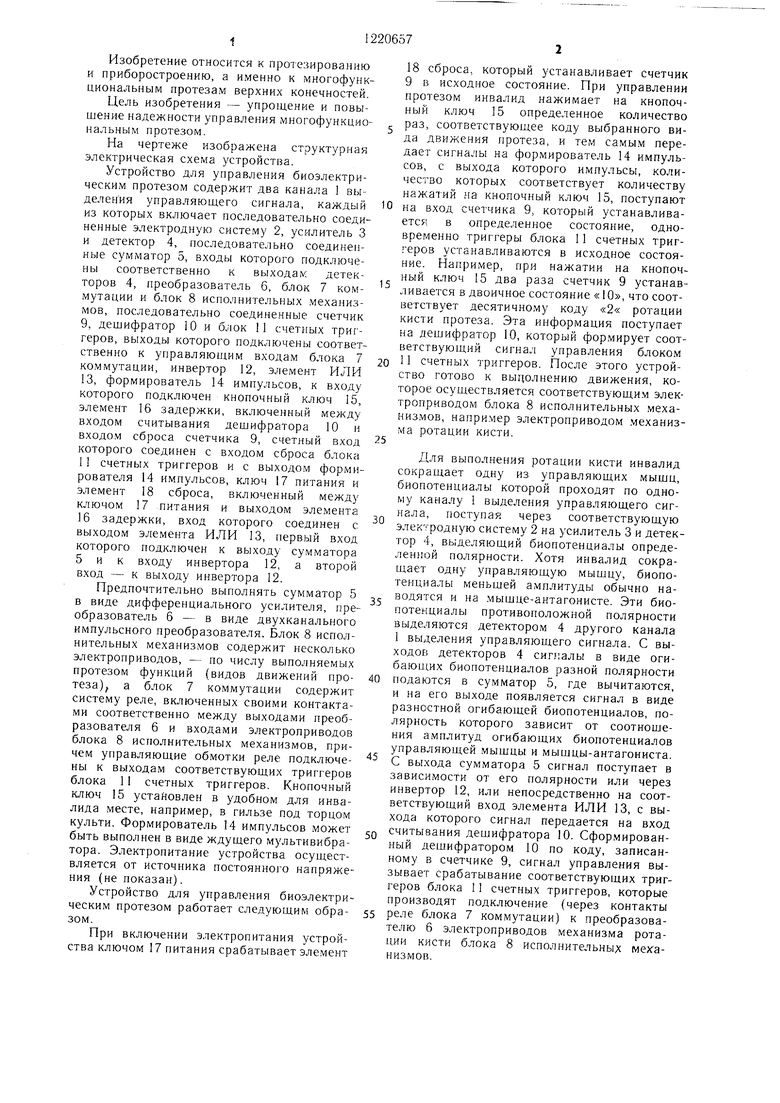

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| Устройство для управления биоэлектрическим протезом плеча | 1985 |
|
SU1344351A1 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
| Устройство для управления протезами верхних конечностей | 1984 |
|
SU1333332A1 |
| Устройство для управления многофункциональным протезом | 1987 |
|
SU1475653A1 |
| Протез плеча | 1989 |
|
SU1666104A1 |
| Устройство для управления многофункциональным протезом | 1987 |
|
SU1475652A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ НА РАСЩЕПЛЕННУЮ КУЛЬТЮ | 1993 |
|
RU2067852C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1991 |
|
RU2026654C1 |

| Протезирование и протезостроение | |||
| Сборник трудов ЦНИИПП | |||
| Вып | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Устройство для управления биоэлектрическими протезами | 1979 |
|
SU822405A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
