Изобретение касается автоматической оптимизации управления сепараторами, в частности такими как зерноочистительные машины.
Известны автоматические оптимизаторы, содержащие датчик непрерывного измерения .расхода отводимой от сепаратора фракции, экстремальный регулятор и исполнительный механизм, воздействующий на бесступенчатый привод сепаратора.
В связи с тем, что статические характеристики процесса сепарации весьма, пологи в области экстремума, то применение в известных устройствах универсальных экстремальных регуляторов приводит к возникновению автоколебаний с больщими амплитудами, что существенно снижает эффективность применения оптимизаторов.
Целью изобретения является повыщение точности поддержания кинематического режима сепарации.
Согласно изобретению в предлагаемом оптимизаторе экстремальный регулятор выполнен в виде интегрирующего устройства, сумматора и командо-аппарата, осуществляющего поочередное подключение датчика к плюсовому и минусовому входам интегрирующего устройства.
ПрИ этом в предлагаемом оптимизаторе интегрирующее устройство соединено с сумматором через элемент непрерывной памяти, который также управляется командо-аппаратом.
Командо-аппарат в предлагаемом устройстве включает в себя наряду с другими элементами и приспособление для выработки сигнала пробного возмущения, которое включается в работу одновременно с подключением датчика к плюсовому входу интегрирующего устройства.
С целью повышения точности отыскания э.кстремума, в предлагаемом оптимизаторе промежутки времени между подключениями датчика к входам интегрирующего устройства приняты больщими, чем длительность переходных .процессов сепаратора.
Интегрирующее устройство, сумматор и элемент непрерывной памяти целесообразно выполнять пневматическими. В частности, командо-аппарат выполнен в виде пневматического кранового переключателя, приводимого во вращение от электродвигателя привода сепаратора и включающего в себя пневматические реле и элемент «ИЛИ.
Пневматическим выполняется и интегрирующее устройство. При этом одна, из не подключаемых к датчику его минусовая камера сообщается с выходом элемента памяти, а иодключаемые к датчику плюсовая и минусовая
бой командо-аппаратом при завершении Цикла работы оитимизатора.
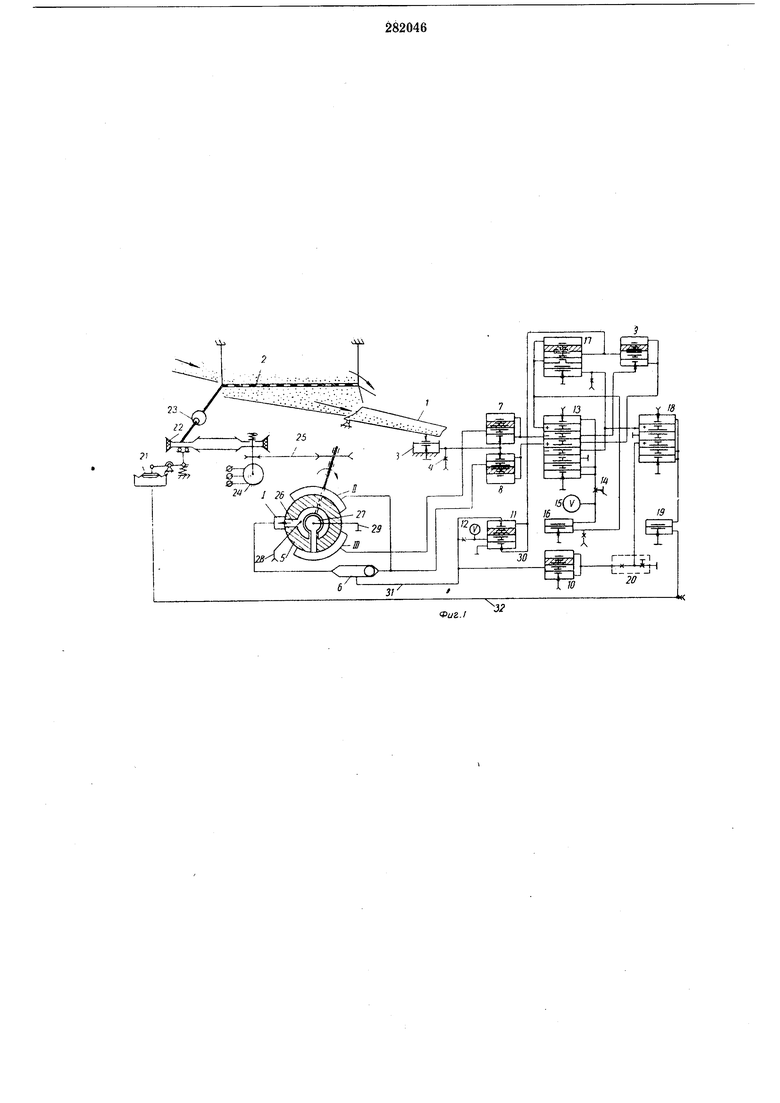
Сущность изобретения иоясняется чертежом, где на фиг. 1 схематически изображен один из вариантов предлагаемого оптимизатора; на фиг. 2 - циклограмма изменений давления в магистралях оптимизатора.
Предлагаемый оптимизатор включает датчик 1 непрерывного расхода фракции, отводимой от сепаратора 2. Датчик представляет собой весоизмерительный элемент в виде следящей мембранной камеры 3, давление питания в которую подводится через дроссель 4 постоянного .сечения.
Командо-анпарат предлагаемого оптимизатора содержит краловый переключатель 5, логический элемент «ИЛИ 6 и четыре пневматических реле 7, 8, 9 и W, а также импульсатор, собранный на базе реле 11 и пневматической емкости 12. Реле 10 выполняет роль приспособления для выработки сигнала пробного возмущения.
Интегрирующее устройство (пневматический интегратор) состоит из элемента 13 сравнения, регулируемого дросселя 14, пневматической емкости /5 и повторителя 16.
Оптимизатор также включает элемент 17 непрерывной памяти, сумматор 18, повторитель 19, делитель 20 давления, собранный на дросселях, и исполнительный механизм 21, воздействующий на бесступенчатый вариатор 22 привода колебательного вала 23 сепаратора.
Крановый переключатель 5 в процессе работы приводится в равномерное вращеаие от двигателя 24 привода сепаратора с помощью передачи 25 и имеет две изолированные полости 26 и 27. Иолость 26 постоянно соединена с магистралью 28 нагнетания, а .полость 27 - с магистралью 29 слива, т. е. постоянно сообщена с атмосферой. Переключатель имеет три окна /, // и ///. В процессе работы эти окна поочередно сообщаются с полостями нагнетания и слива.
На фиг. 2 показана циклограмма изменения давления в иолостях и магистралях предлагаемого оптимизатора, а именно, в полостях окон переключателя и магистралях 30 и 31; при этом точка t на циклограмме соответствует .положению переключателя, показанному на фиг. У; точка 4 - моменту срабатываиия реле //и разобщения им магистрали 5/ с магистралью 30, при которо.м последняя соеди. няется со сливом; точка t - нахождению переключателя в положении, при котором его полость 26 сообщается с окном //; точка 4- .нахождению переключателя в пололсении, при котором его полость 27 сообщена с окном /; точка 4 - сообщению полости 27 с окном //; точка 6 - сообщению полости 26 с окном ///; t - сообщению полости 27 с окном ///, а полость 26 - с окном /, что соответствует началу нового цикла.
При .положении поворотного крана 5 .командо-аппарата в положении, показанном на фиг. 1, давление пита-ния из полости 26 поступает через элемент «ИЛИ 6 и магистраль 5/ к реле 10. В окнах // и /// в это время атмосферное давление, т. е. давление слива, поэтому сопла реле 7 и S закрыты и сигнал от пневматического весоизмерительного элемента датчика расхода выделяемой фракции не
поступает к камерам интегратора.
В первый момент, пока емкость J2 не за.цолнена воздухом, верхнее сопло реле 11 открыто, а нижиее закрыто, и давление из магистрали 31 поступает к управляющим камерам элемента 17 непрерывной памяти .и реле 9. В результате этого на короткий срок (фиг. 2) верхняя плюсовая камера интегратора сообщается с плюсовой камерой сумматора 18 и собственной нижней минусовой камерой, а входные плюсовая и минусовая камеры интегратора соединяются между собой через реле 9. За это время давление в верхней плюсовой и нижией минусовой камерах интегратора равно и, таким образом, у интегратора устраняется ощибка, вызванная дрейфом «нуля. После заполнения емкости 12 сжатым воздухом до давления, обеспечивающего срабатывание реле 11, верхнее солло этого реле закрывается, а -нижнее открывается
и магистраль 30 соединяется со сливом (атмосферой). Элемент 17 иепрерыв-ной памяти разобщает выход интегратора с сумматором 18, запомнив одновременно значение бывщего давления на выходе интегратора. Реле 9 возвращается в свое исходное состояние и разобщает плюсовую и минусовую камеры интегратора.
При подаче давления к реле 10 (положение поворотного краиа, показанное на фиг. 1) последний открывает свое сопло п к делнтелю 20 поступает давление питания. С делителя 20 заданная соотнощениями его дросселей часть давления питания, которое является сигналом пробного воз.мущения, поступает в нижнюю
плюсовую .камеру сумматора. Таким образом, давление на выходе сумматора 18 равно сумме давления в элементе 17 памяти и давления пробного возмущения. Это давление через повторитель 19 по магистрали 32 иодается к
пневматическому позиционному исполнительному механизму 21, который пропорционально значению давления уста.навливает обороты колебательного вала 23 решетного сепаратора за счет соответствующего изменения положення дисков щкивов вариатора 22.
В магистрали 31 давление питания сохраняется до тех лор, пока окно // не сообщится со сливной магистралью через полость 27 и элемент «ИЛИ 6, соединяющий окна / и //.
Через время (фиг. 2), которое больше времени, необходимого для перемещения исполнительного механизма 21 в новое положение и завершения вызываемого этим переходного процесса сепаратора, полость 26 по{дается ic окном //. Необходимая выдержка времени з-t обеспечивается соответствующим выбором скорости вращения поворотного крана. Как только нагнетательная полость 26 поворотного ;кра:на сообщится с окном //, дав-ление питания поступает к управляющей камере реле 8. Оно срабатывает, от1«ры1вает свое сопло, и камера 3 весоизмеритель-ного элемента оказывается подключенной к плюсовой камере интегратора. В промежуток времени, в течение которого к окну // подается давление питания, Интегрируется сигнал датчика, подключенного к плюсовой камере интегратора. Как только полость 27 слива поворотного «рана оказывается против окна //, давление в Пем падает до атмосферного и реле 8 возвращается в исходное состояние, разобщив камеру 5 датчика с интегратором. На выходе интегратора фиксируется, таким образом, давление, пропорциональное количеству материала, прошедщего через решето за время Т (фиг. 2). Одновременно с этим магистраль 31 оказывается сообщенной с атмосферой (со сливом) и реле 10 закрывает свое сопло, что ведет к падению давления пробного возмущения до атмосферного. В связи с этим -на выходе сумматора 18 давление уменьшается па величину пробного возмущения, т. е. до исходного значения, что, в свою очередь, ведет к уменьшению оборотов колебательного вала сепаратора до исходного значения. Через время (ноеле сообщения окна // со сливом), которое больше времени, необходимого для возвращения иснолнительного механизма 2} в исходное положепие (до нанесения пробного возмущения) и заверщепия вызываемых этим переходных процессов сепаратора 2, окно /// сообщается с полостью 26 «агнетапия поворотного крана. Нри этом давление питания поступает к камере управления реле 7, и оно открывает свое сопло, соединив камеру 3 датчика с минусовой камерой интегратора. Интегрирование сигнала датчика осуществляется, пока окно /// не сообщается с атмосферой, т. е. в течение такого же отрезка времени Т, что и раньше, при нодключении датчика к плюсовой камере интегратора. Носкольку теперь датчик подключен к минусовой камере, то результат интегрирования вычитается из результата предыдущего иитегрироваНИЯ. Носле окончания пнтегрпрования на выходе интегратора давление пропорционально разности .количества материалов, прощедЩ;их за время Т при возмущенном и невозмущенном режнмах сепарации. Если система автоматической оптимизации процесса сепарации находится слева от экстремума, то эта разность положительная и в дальнейшем для достижения экстремума следует увеличивать обороты колебательного вала. Если ристема находится справа от экстремума, TQ эта ; разность отрицательная (т. е. давление -ра вы.коде интегратора после двустороннерО интегрирования становится мепь510 15 20 25 30 35 40 45 50 55 60 65 ше исходного) и для достилсения экстремума обороты колебательного вала следует уменьшать. Все это совершается автоматически на следующем этане цикла работы оптимизатора. Как только окно /// поворотного крана сообщается с атмосферой, реле 7 возвращается в исходное -положение и разобщает датчик прохода от интегратора. При дальнейщем вращенип поворотного крана его нагнетательная полость сообщается вновь с о-кном / и происходит раяее описаниое изменение состояния элементов 11, 26, 9, 18, 10 и 21 и т. д. При этом выходное давление интегратора через элемент памяти подается в плюсовую камеру сумматора и минусовую нижнюю камеру интегратора и запоминается там. Одновременно реле 9 соединяет между собой входные капалы интегратора, что лриводит к полному выравниванию давлений в верхней нлюсовой и нижней минусовой его камерах и устранению тем самым ошибки от дрейфа «нуля интегратора. Если результирующее изменение давления на выходе интегратора после двустороннего интегрирования положительное, то давление в верхней плюсовой камере сумматора 18 увеличивается, следовательно, рабочее значение оборотов колебательного вала увеличивается пропорционально этому изменению давления. Таким образом, система совершает рабочий шаг в сторону экстремума, -причем величина этого шага пропорциональна удаленности системы от экстремума. Если результирующее изменение давления па выходе интегратора отрицательное, то давление в верхней плюсовой камере сумматора 18 уменьшается, что ведет к пропорциональному уменьшению рабочего значения оборотов колебательного вала, и система, таким образом, делает рабочий шаг в сторону экстремума. Если результирующее изменение давления на выходе интегратора равно нулю, то это свидетельствует о нахождении системы вблизи экстремума. Давление в верхней плюсовой камере сумматора не меняется и рабочее значение оборотов колебательного вала остается прежним. После этого цикл работы повторяется в изложенном выше порядке. П р е д iM е т i з о б р е т е п и я 1. Автоматический оптимизатор для управления сепаратором, содержащий датчик пепрерывного измерения расхода отводимой от сепаратора фракции, экстремальиый регулятор и бесступенчатый привод сепаратора, отличающийся тем, что, с целью повышения точности ноддерл ания оптимального кинематического режима сепарации, экстремальный регулятор выполнен в виде интегрирующего устройства, сумматора и комапдо-аннарата, осуществляющего поочередное подключение датчика к плюсовому и минусовому входам иитегрирующего устройства, причем интегрирующее устройство соединено с сумматором через элемент непрерывной памяти, управляемый командо-апнаратом.
2.ОнтиМИзатор но н. 1, отличающийся тем, что, с целью новышення точности отыскания экстремума, нромежутки времени между подключениями датчика к входам интегрирующего устройства нриняты больнлими, чем длительность нереходных процессов сенаратора.
3.Онтимизатор по п. 1, отличающийся тем, что кома.ндо-аппарат содержит нриспособление для выработки сигнала пробного возмущения.
4.Онтимизатор но нн. I, 3, отличающийся тем, что приспособление для выработки сигнала пробного возмущения выполнено включаемым прН подключении датчика к плюсовому входу интегрирующего устройства.
5. Оптимизатор по н. I, отличающийся тем, что интегрирующее устройст-во, сумматор и элемент -непрерывной памяти выполнены нневматическими.
6. Оптимизатор по пп. 1, 5, отличающийся тем, что одна из не подключаемых к датчику минусовая камера интегрирующего устройства сообщена с выходом элемента памяти, а подключаемые к датчику .плюсовая и минусовая
камеры выполнены соединяемыми между собой командо-анпаратом при завершении цикла работы оптимизатора.
7. Оптимизатор по пп. 1, 5, отличающийся тем, что командо-аппарат содержит нневматический крановый нереключатель, нриводимый во вращение, например, от электродвигателя привода сепаратора, а также пневматические реле и элемент «ИЛИ.


| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР ПРОЦЕССА СЕПАРАЦИИ | 1970 |
|
SU268881A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОПТИМИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ | 1970 |
|
SU265863A1 |
| ПНЕВМАТИЧЕСКИЙ ДВУХКАНАЛЬНЫЙ ОПТИМИЗАТОР | 1972 |
|
SU419849A1 |
| ПНЕВМАТИЧЕСКИЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР С ПЛАВАЮЩЕЙ СИСТЕМОЙ ОТСЧЕТА | 1968 |
|
SU217496A1 |
| ПНЕВМАТИЧЕСКИЙ СУММАТОР НАКАПЛИВАЮЩЕГО ТИПА | 1971 |
|
SU296111A1 |
| МНОГОКАНАЛЬНЫЙ ПНЕВМАТИЧЕСКНЙ ОНТИМИЗАТОР С ПЛАВАЮЩЕЙ СИСТЕМОЙ ОТСЧЕТА | 1970 |
|
SU264023A1 |
| Пневматический двухканальный оптимизатор | 1974 |
|
SU526858A1 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
| Пневматический регулятор | 1989 |
|
SU1619230A2 |
| Пневматическое устройство для управления процессом дозирования | 1981 |
|
SU1010597A1 |