Изобретение относится к области улра.вления циклическими и непрерывными технологическими процессами и может быть использовано в нефтеперера:батывающей и химической ..промышленности, в частности для каталитических, ректификационных лродессов.
Известно устройство для а втоматической оптимизации технологических процессов, содержащее оптимизатор, вход которого лодключен к выходу объекта, а выход оптимизатора соединен со стабилизирующим регулятором входных параметров лроцесса.
Педостатками такого устройства являются сравнительно малое быстродействие при большой инерционности управляемого объекта, а 1акже большая ошибка отслеживания экстремума при относительно высокочастотных внешних воздействиях.
Цель изобретения - повышение быстродействия устройства при большой инерционности управляемого объекта .и уменьщение ошибки отслеживания экстремума на 2-3%. Это достигается тем, что устройство снабжено адаптивным блоком, содерл :ащим фильтр внешних воздействий, подключенный ко входу объекта, 1ПОЛОСОЗОЙ фильтр, соединенный с (выходом оптимизатора, коррелятор, связанный с фильтром внешних воздействий и полосовым фильтром, блок управления по внешним воздействиям, суммарный .выход которого подключен
к ооъекту, а БХОДЫ - к выходам оптимизатора., фильтра внешних воздейсгвий и коррелятора. Бло,к управления по внешним воздействиям выполнен в виде основного сумматора, к минусовой камере которого подсоединен множительный блок, а к плюсо.вой камере - сумматор на дросселях, лричем выход основного сумматора связан с другим сумматоро.м на дросселях, который своим выходом соедипен с камерой положительной обратной связи основного сумматора.
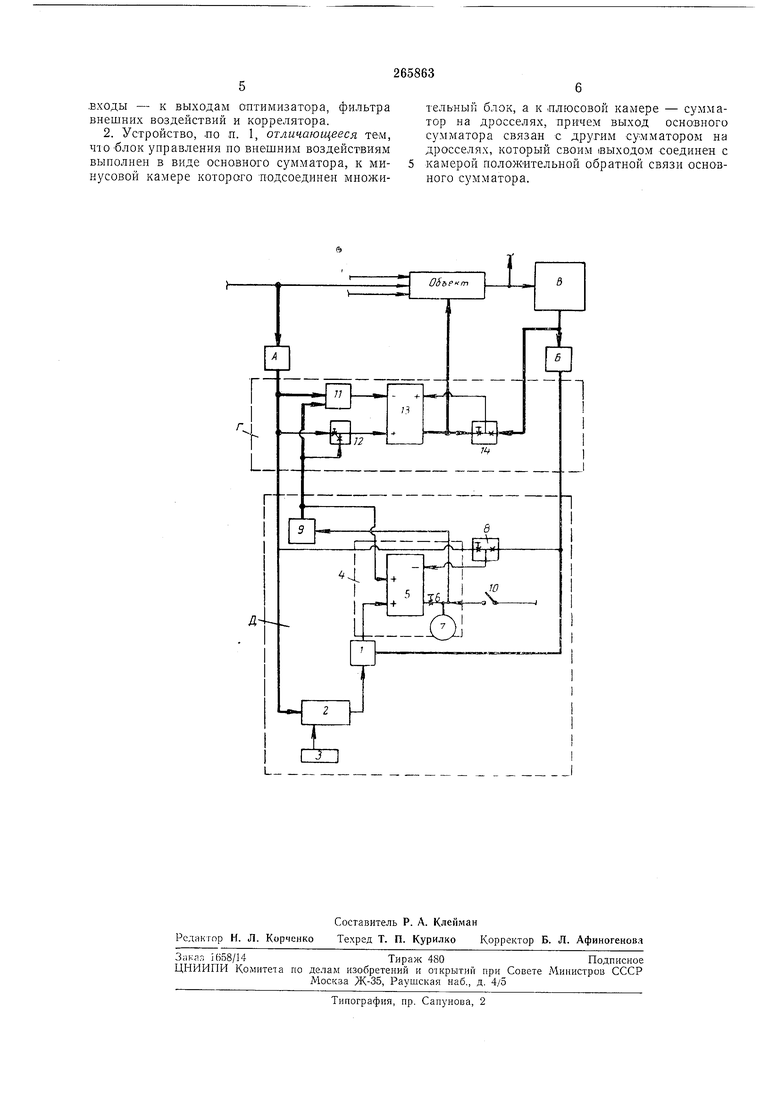
Иа чертеже изображена принципиальная схема устройства автоматической оптимизации технологических процессов.
Оно состоит из четырех блоков: пневматических полосовых фильтров А и Б, оптимизатора В, блока Г управления по внешним 1воздействиям и коррелятора Д для настройки опти.мальных параметров блока Г.
Полосовые фильтры Л и Б собраны на базе регулирующих блоков системы «Старт и инерционных звеньев, собранных из емкостей и дросселей системы УСЭППА. Камеры пзодрома регулирующих блоков отглушены от выхода и использованы для ввода постоянных составляющих. Входные сигналы на фильтры .подаются на инерционные звенья, 1выходы которых соединены с ;плюсовымп и минусовыми
Коррелятор Д состоит из множительного блока 1, лииии 2 задержки, собранной на элементах УСЭППА, управляемой генератором 3, интегратора 4, собранного на базе сумматора 5, неременного дросселя 6 и емкости 7. В схему коррелятора Д включен сумматор 8 на дросселях. На выходе коррелятора установлен усилитель мощности 9. Для включения коррелятора в схеме устройства нредусмотре тумблер 10.
Блок Г унравления по внешним воздействиям |В,ключает множигельный блок 11, сумматор 12 на дросселях, сумматор 13 и сумматор 14 на дросселях.
Устройство работает следующим образом.
Внешние воздействия с управляемого объекта нодаются на нолосовой фильтр А внешних воздействий. На выходе оптимизатора В также установлен полосовой фильтр Б. Отфильтрованные сигналы нодаются на вход множительного блока 1 коррелятора Д. Влияние внешнего воздействия на изменение положения экстремума .происходит с запаздыванием, учитываемым ири номощи снениальной линии задержки. Включением линии 2 задержки во .времени управляет генератор 3. Выход множительното -блока 1 идет s камеру «нлюс сумматора 5 интегратора 4. Одновременно отфильгрозанные сигналы ноступают в камеру «минус сумматора 5 через сумматор 8 на дросселях С коэффициентом усиления но обоим сигналам, равныл 0,5, для выделения нолезной составляющей произведения (т. е. произведения только переменных составляющих).
Выход коррелятора Д поступает на вход блока Г унравления ло внешним .воздействиям через усилитель мощности 9. Включение коррелятора осуществляется тумблером 10, в результате чего выход интегратора 4 подсоединяется к линии услов.чого нуля. Условный нуль принят равным 0,5 ати.
Вьходы фильтра Л внешних воздействий и коррелятора Д поступают в блок Г управления по внешним воздействиям на множительный блок 11, выход которого идет в камеру «минус сумматора 13. Одновременно в камеру «минус сумматора 13 вводится выход сумматора 12 на дросселях, на котором суммируются 1ВЫХОДЫ фильтра А внешних воздействий и коррелятора Д с коэффициентом 0,5 ino обоим выходам для нолучения переменного коэффициента усиления блока Г управления .ио .внешним воздействиям без смещения среднего значения его выхода.
В схему сумматора 13 ВВедена положительная обратная связь, являющаяся выходом сумматора 14 на дросселях, входными сигналами которого служат выходы оптимизатора В и сумматора 13. При помощи сумматора 14 на дросселях регулируется коэффициент усиления блока Г упразления но внешним воздействиям, при этом коэффициент усиления выхо.да онтимизатора В остается неизменным. Выход сумматора 13, служащий суммарным выходом блока Г управления по внешним
воздействиям и оптимизатора В, является управляющим воздействием предложенного устройства. Прн управлении объекта оптимизаTOpOiM В непрерывно отслеживается экстремум, при этом управляющим воздействием на объект является выход оптимизатора В.
Включение коррелятора осуществляется нажатием тумблера 10. При этом начинается процесс автоматической взаимной корреляции сигналов, поступающих на вход коррелятора. В процессе корреляции автоматически производится Определение коэффициента -влияния внешних воздействий на изменение положения экстремума. В начальный момент времени выход коррелятора Д равен условному нулю. Коэффициент усиления блока Г унравления по внешним воздействиям также равен нулю.
В процессе корреляции функция унравления
0 постепенно переходит от оптимизатора В к блоку Г у.правления по внешним -воздействиям. По мере изменения выхода коррелятора Д коэффициент усиления блока Г управления по внешним 1воздействиям стремится к коэффициенту влияния внешнего воздействия на изменение ноложения экстремума. Следовательно, алгоритм блока Г выясняется в .процессе работы оптимизатора В иосредством автоматического изучения ири помощи коррелятора Д взаимосвязей между унравляющим воздействием онтимизатора В и внешним воздействием. При этом управляющее воздействие складывается из двух составляющих; выхода оптимизатора В и выхода блока Г уп5 давления по внешним воздействиям. Через некоторый промежуток времени (период самообучения) составляющая блока Г управления по внешним воздействиям становится -основной. Процесс самообучения заканчивается, начинается процесс управления оптимизируемым объектом по внешним воздействиям. При этом коэффициент усилеиия блока Г управления ио внешним воздействиям становится равным коэффициенту влияния внешнего воздействия
5 на изменение положения экстремума, в результате чего повышается качество управления оптимизируемым объекто-м.
Предмет изобретения
0 1. Устройство для автоматической оптимиза ции технологических процессов, содержащее оптимизатор, вход которого подключен к выходу объекта, а выход оптимизатора соединен со стабилизирующим регулятором входных
5 параметров процесса, отличающееся тем, что, с целью повышения быстродействия устройства и уменьшения ошибки отслелшвания экстремума, оно снабжено адаптивным блоком, содержащим фильтр внешних воздействий.
нодключенный ко входу объекта, полосовой фильтр, соединенный с выходо.м оптимизатора, коррелятор, связанный -с фильтром внешних воздействий и полосовым фильтром, блок унравления по вне.шннм воздействиям, суммар.входы - к выходам оптимизатора, фильтра виешних воздействий и коррелятора.
2. Устройство, .по п. 1, отличающееся тем, чтоблок управления по внешним воздействиям выполнен в виде основного сумматора, к минусовой камере которого подсоединен множительный блок, а к плюсовой камере - сумматор на дросселях, причем выход основного сумматора связан с другим сумматором на дросселях, который своим выходом соединен с камерой положительной обратной связи основного сумматора.

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР ДЛЯ УПРАВЛЕНИЯ СЕПАРАТОРОМ | 1970 |
|
SU282046A1 |
| МНОГОКАНАЛЬНЫЙ ПНЕВМАТИЧЕСКНЙ ОНТИМИЗАТОР С ПЛАВАЮЩЕЙ СИСТЕМОЙ ОТСЧЕТА | 1970 |
|
SU264023A1 |
| АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР ПРОЦЕССА СЕПАРАЦИИ | 1970 |
|
SU268881A1 |
| ПНЕВМАТИЧЕСКИЙ ДИСКРЕТНЫЙ РЕГУЛЯТО ОПТИМАЛЬНОГО РЕЖИМА | 1971 |
|
SU432457A1 |
| ПНЕВМАТИЧЕСКИЙ ДВУХКАНАЛЬНЫЙ ОПТИМИЗАТОР | 1972 |
|
SU419849A1 |
| МНОГОКАНАЛЬНЫЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР | 1970 |
|
SU270856A1 |
| Автоматический оптимизатор группы объектов | 1973 |
|
SU462166A2 |
| Устройство для автоматической оптимизации технологических процессов | 1973 |
|
SU476549A1 |
| ПНЕВМАТИЧЕСКИЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР С ПЛАВАЮЩЕЙ СИСТЕМОЙ ОТСЧЕТА | 1968 |
|
SU217496A1 |
| АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР ГРУППЫ ОБЪЕКТОВ | 1973 |
|
SU381062A1 |