Известны пневматические автоматические оптимизаторы, выполненные на элементах УСЭППА.
Предложенное устройство позволяет улучшить качество управления по двум каналам с различной инерционностью, повысить надежность работы и отличается от известных тем, что, в нем дополнительно установлены два трехпозиционных реле с повторителями, подключенными соответственно к выходам сумматора и интегратора, и блок управления с четырьмя группа-ми переключателей давлений; объединенные выходы первых двух групп переключателей .подключены к сумматору, а объединенные выходы каждой из оставшихся групп переключателей -подсоединены ко входам трехпозиционных реле, причем выходы этих реле подключены к повторителям с помощью прямой и перекрестной связей.
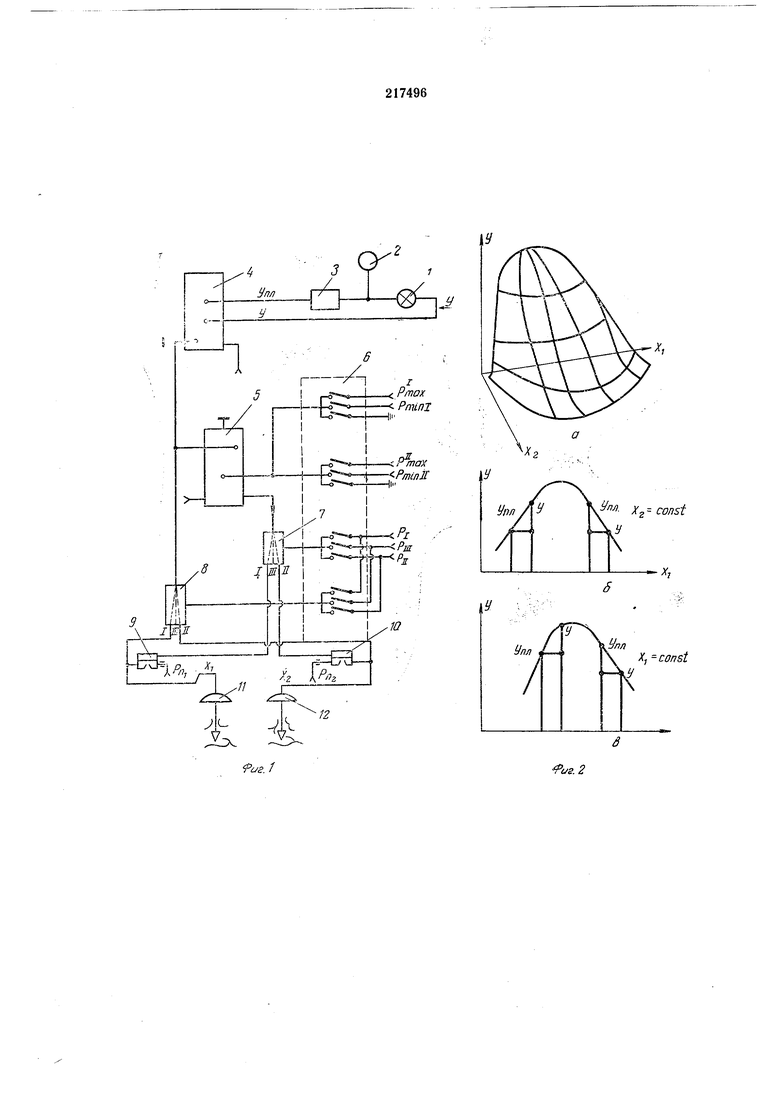
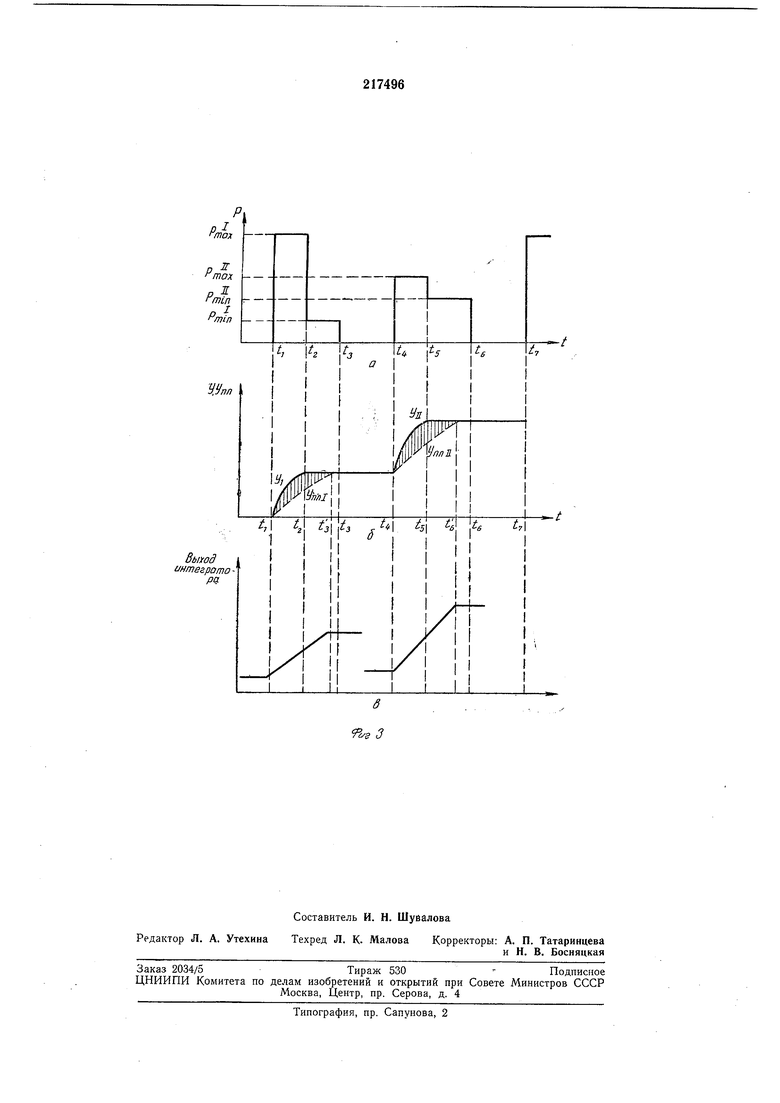
На фиг. 1 показан предложенный омптимизатор; па фиг. 2,а - общий вид экстремальной зависимости величины У от двух управляющих воздействий i и Х, на фиг. 2,6 и 2,8-сечения этой зависимости при 2 const и Xi const; на фиг. 3 - последовательность действий двухканального оптимизатора.
7 и 8, повторители 9 и /О и исполнительные механизмы 11 и 12.
Оптимизатор работает следующим образом.
Начиная с момента времени /i (см. фиг. 3) блок управления 6 подает на вход -сумматора 5 давление Plnax, на вход реле 7 - давление PI , а на вход реле 8 - давление Рщ. При это;м реле 8 находится в промежуточном положении П1, а реле 7 соединяет выход сумматора 5 с повторителем 9. Выход повторителя 9, обрабатывающего сигнал сумматора 5, соединен с исполнительным механизмом 11.
В момент времени t блок управления подает на вход сумматора давление Pmin, обеспечивая форсировку по каналу А - У. Оптимизируемая величина У поступает в интегратор 4 по двум каналам: непосредственно (У) и через плавающую еистему отсчета Ур, (дроссель /, конденсатор 2 и усилитель S).
ЕСЛИ в данный момент -мы находимся слева от экстремума (см. фиг. 2,6) то УПЛ меньше У. Интегрирование этой разно-сти до момента уравнивания У и Урл (см. фнг. 3,6) приводит к увеличению давления на интеграторе (см. фиг. 3,0) и к движению в сторону экстремума (см. фиг. 2,6).
входов сумматора, идущего от блока управления, с атмосферой. При этом реле 7 находится в промежуточном положении III, а реле 8 находится -в ооложении II и соединяет линию исполнительного механизма 12 с выходом .интегратора 4. Давление на выходе интегратора 4 и сумматора 5 становится равным давлению на исполнительном механизме 12.
В момент времени t управляющий блок иодает на вход сумматора 5. давление Ртал: , на реле 7 - давление Рц , а на реле 8 - давление Ящ. При реле 8 находится в промежуточном положении III, а реле 7 соединяет выход сумматора 5 с повторителем 10, который отрабатывает увеличение давление на исполнительном механизме 12 на Ртах
Через промежуток времени 4 - 4, равный промел утку 4 - /1, на вход сумматора 5 подается давление . В результате -ступенчатого возмущения происходит изменение величины У. Оптимизируемая величина поступает в интегратор 4 ino тем же двум каналам: непосредственно У и через плавающую систему отсчета У „л
Если в данный момент мы также находимся слева от экстремума (см. фиг. 3,8), то У„„ меньше У. Интегрирование этой разности до момента сравнивания У и УПЛ приводит к увеличению давления на интеграторе (см. фиг. 3,8) и к движению в сторону экстремума (см. фиг. 2,в}.
В момент /о блок управления подает на реле 7 давление Рт , а на реле 5 - давление PI и соединяет один из входов сумматора 5, идущего от блока упра-вления, с атмосферой. При этом реле 7 находится в промежуточном положении, а реле 8 соединяет выход интегратора 4 с исполнительным механизмом 11. На выходе интегратора 4 и сумматора 5 отрабатываются давления, равные давлению на исполнительном механизме 11.
В -момент времени t блок управления подает на сумматор давление Р1„ах , на реле 7 - давление PI и на реле 8 - давление Рщ Цикл работы оптимизатора повторяется. В результате действий оптимизатора У выходит на экстремум по каждому из каналов управления. В этом положении «з-за пологости экстремальной характеристики при подаче пробных колебаний по Х и Xz величина УПЛ практически не отличается от У и интегратор 4 не изменяет выходного давления.
Если по условиям работы объекта управления на перемещение исполнительных механизмов должны быть -наложены ограничения по минимуму и (Максимуму Х, Х, то в лредлагаемом устройстве они могут быть введены следующим образом. Минимальные значения давления Xi, Хз могут вводиться при помощи применения в повторителях 9 н 10 начальных смещений. Максимальные давления Х и
ограничиваются установкой соответствующих значений давлений питания Ящ и „2 тех же повторителей 9 и 10.
Предмет изобретения
Пневматический автоматический оптимизатор с плавающей системой отсчета, содержащий сумматор и интегратор, отличающийся тем, что, с целью улучшения качества управления по двум каналам с различной инерционностью и повыщения надежности, в нем дополнительно установлены два трехпозиционных реле с повторителями, подключенными соответственно к выходам сумматора и интегратора, и блок управления с четырьмя группами переключателей давлений; объединенные выходы первых двух групп переключателей подключены к сумматору, а объединенные выходы каждой из оставшихся групп
переключателей подсоединены ко входам трехпозиционных реле, причем выходы этих реле подключены к повторителям с помощью прямой и перекрестной связей.
//
.
Pj
max -
p
PmLn
Pmin
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический двухканальный оптимизатор | 1974 |
|
SU526858A1 |
| МНОГОКАНАЛЬНЫЙ ПНЕВМАТИЧЕСКНЙ ОНТИМИЗАТОР С ПЛАВАЮЩЕЙ СИСТЕМОЙ ОТСЧЕТА | 1970 |
|
SU264023A1 |
| ПНЕВМАТИЧЕСКИЙ ДВУХКАНАЛЬНЫЙ ОПТИМИЗАТОР | 1972 |
|
SU419849A1 |
| АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР ДЛЯ УПРАВЛЕНИЯ СЕПАРАТОРОМ | 1970 |
|
SU282046A1 |
| АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР ПРОЦЕССА СЕПАРАЦИИ | 1970 |
|
SU268881A1 |
| Двухканальный шаговый оптимизатор | 1985 |
|
SU1343391A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| АНАЛОГОВОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ НАХОЖДЕНИЯ ЭКСТРЕМУМА ФУНКЦИЙ МНОГИХПЕРЕМЕННЫХ | 1972 |
|
SU326590A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОПТИМИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ | 1970 |
|
SU265863A1 |
У.УПЛ
8ы)1од интегратора
