1
Изобретение относится к экстремальным регулирующим устройствам.
Известны оптимизаторы, содержащие интегратор, выполненный в виде сумматора и емкости, основной сумматор, один вход которого соединен с выходом интегратора, узел плавающей системы отсчета, вход которого соединен с входным каналом устройства, а выходы- с плюсовой и минусовой камерами сумматора интегратора, блок управления, выполненный в виде обегающего устройства и двух ячеек, каждая из которых состоит из трех пневматических мембранных релейных элементов, управляющие камеры которых подключены к выходам обегающего устройства, а сопловые камеры соединены со вторым входом основного сумматора и через дроссель - с задатчиком. Сопла первых элементов каждой ячейки соединены через регулируемые дроссели, а сопла третьих элементов ячеек непосредственно соединены с атмосферой. В устройства также входят два узла управления исполнительными механизмами, каждый из которых содержит трехмембранное реле, два клапана и повторитель.
Недостатком известных устройств является равенство постоянной времени интегратора при подключении к разным каналам. При существенной разнице динамических характеристик каналов это приводит к ухудшению качества поиска.
С целью повышения надежности работы интегратор содержит два регулируемых дросселя, а вторые сопловые камеры релейных элементов через сопла последовательно соединены между собой, вторые сопла первых реле ячеек подключены к выходу сумматора интегратора, а вторые сопловые камеры третьих реле обеих ячеек соединены соответственно с входами первого и второго регулируемых
дросселей интегратора, выходы которых соединены с емкостью и со входом основного сумматора.
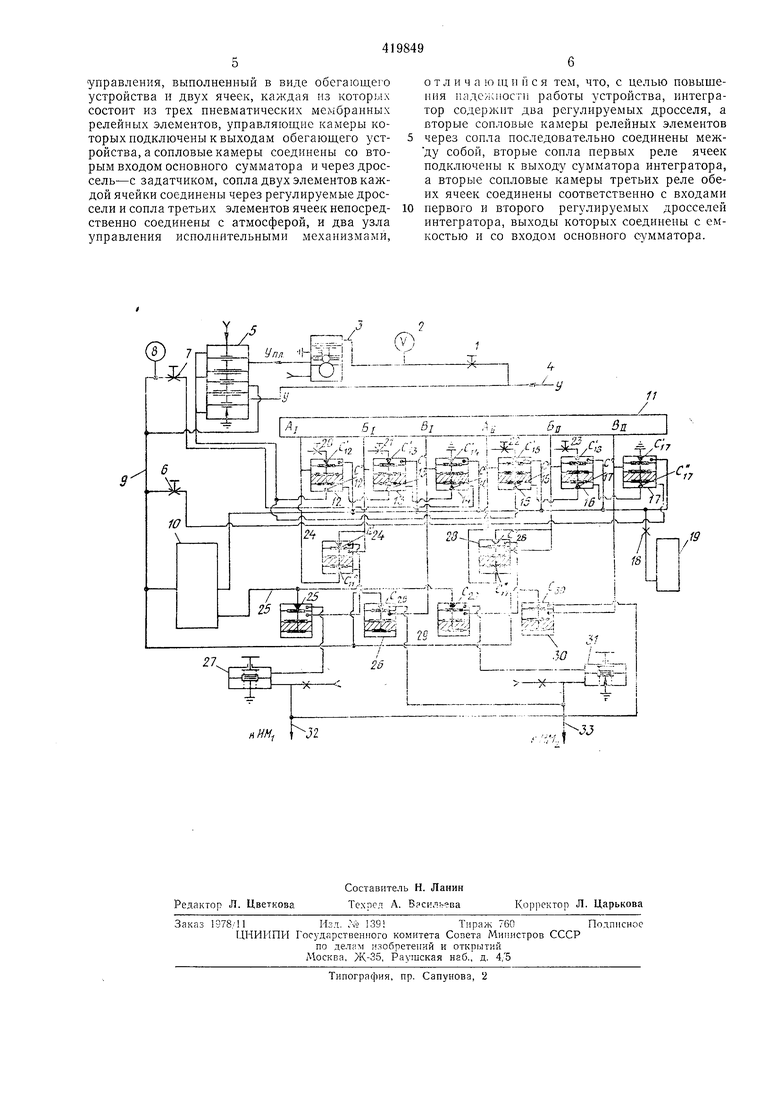
На чертеже приведена схема предлагаемого устройства.
Узел плавающей системы отсчета выполнен в виде дросселя 1, емкости 2 и усилителя мощности 3 вместе с входным каналом 4 устройства. Интегратор образован сумматором 5, регулируемыми дросселями 6 п 7 и емкостью 8. Выход 9 интегратора соединен со входом основного сумматора 10.
Блок управления выполнен в виде обегающего устройства 11 и двух ячеек, первая из
которых построена на трехмембранных реле 12, 13 и 14, а вторая - на реле 15, 16, 17. Управляющие камеры реле 12-17 подключены к выходам А, Б и В обегающего устройства 11. Верхние сопловые камеры реле 12-17 соедипены со вторым входом основного сумматора 10 н через дроссель 18 - с задатчиком 19. Верхние сопла реле 12, 13, 15 и 16 соединены через регулируемые дроссели 20-23 с атмосферой, а верхнне сопла реле 14 и 17 соединены с атмосферой неносредственно. Первый узел унравления исно.пштельными механизмами содержит реле 24, клапаны 25 и 26 и повторитель 27. Соответственно второй узел - реле 28, клананы 29 и 30 и повторитель 31. Командные, сигналы к исполнительным механизмам подаются через выходные каналы 32 и 33. Оптимизатор работает следующим образом. В момент времени /i обегающее устройство 11 создает на выходе AI сигнал, который ноступает в камеру реле 12, открывая сопло Cj2 и сообщая вход основного сумматора 10 с атмосферой через переменный дроссель 20. Дроссель 20 совместно с дросселем 18 образует пневматический делитель давления, поступающего от задатчика 19. Переменный дроссель 20 настроен таким образом, что на вход сумматора 10 поступает пробное воздействие Р Одновременно сигнал с выхода AI обегающего-устройства 11 через открытое сопло С 24 реле 24 поступает в камеру клапана 25, открывая сопло С25. При этом сигнал с сумматора 10 проходит через сопло С25 к повторителю 27, обеспечивающему управляющее воздействие Xi па исполнительный механизм HMi первого канала управления 32. В момент /2 сигнал на выходе AI обегающего устройства 11 исчезает и появляется на выходе Б. При этом сопло Cj2 закрывается. сопла С J2 и Cjg реле 13, в камеру которого поступает сигнал с выхода Б, открываются, а сопло Ci3 закрывается. Переменный дроссель 21 на первом выходе этого реле пастроен так, чтобы обеспечить на входе сумматора 10 давление Р,,, . Сигнал с выхода Б поступает в камеру реле 24, закрывает сопло С24 открывает сопло С , , через которое воздух проходит в камеру клапана 25, обеспечивая через сопло С25 соединение выхода сумматора 10 с повторителем 27. Тем самым создается ступенчатое пробное воздействие по каналу Xi-Y. Прн этом оптимизируемая величина поступает в сумматор 5 по двум каналам: непосредственно noY-через канал 4, а через плавающую систему отсчета - дроссель 1, пневмоемкость 2 и усилитель 3 поступает УдлЕсли система находится в данный момент слева от экстремума, то Упл из-за инерционности плавающей системы отсчета, содержащей дроссель 1 пневмоемкость 2 и усилитель 3, по величине больше У. Наличие этой разности (до момента уравнивания У и УПЛ в емкости 2 плавающей системы) приводит к увеличению давления на выходе сумматора 5, который связан в данном случае со входом сумматора 10 через дроссель 6, так как наличие сигнала на выходах AI или Б приводит к закрытию одного из последовательно сединенных сопел Cj2 или Cj3 , в то время как сопла С15 , Clg и CjV открыты. Проводимость дросселя 6 определяет постоянную времени интегратора по первому каналу управления. В момент времени /з появляется сигнал на выходе BI обегающего устройства 11, а сигпал на выходе BI пропадает, поэтому сопла 24 и -зз закрываются, выход сум латора 10 больше не имеет связи с повторителем 27. Сигнал с выхода BI поступает в камеру реле 14, сопло Cj4 открывается, сбрасывая давлепие со входа сумматора 10 в атмосферу. сопло закрывается. Одновременно сигнал с выхода BI поступает в камеру клапана 26, открывая сопло С26. При этом выход повторителя 31 2-го канала 33 управления через сопло Си соединяется с пневмоемкостью 8 интегратора. Поэтому перед моментом t когда на выходе АИ обегающего устройства 11 появляется сигнал, выходной сигнал сумматора 5 будет равен сигналу Х2 на входе исполнительного механизма ИМз второго канала управления 33 В момент 4 появляется сигнал на выходе AIL обегающего устройства 11 и пропадает сигнал на выходе BI. Поэтому сопла Cj,, и С26 закрываются. Сигнал с выхода АИ обегающего устройства 11 поступает в камеру реле 15, закрывает сопла Cjj и открывает сопло С jg , сообщая вход сумматора 10 через дроссель 22 с атмосферой. Дроссель 22 построеп так, чтобы на входе сумматора давление было равно PJ,j,((. . Одновременно сигнал с выхода АП через открытое сопло Cgg реле 28 поступает в камеру клапана 29, открывая сопло С29. При этом выходной сигнал сумматора 10 через сопло Саэ поступает на вход повторителя 31. В момент времени t, который наступает через промежуток времени 5-ti, равный промежутку tz-ti, на выходе БП обегающего устройства 11 появляется сигнал, а на выходе АИ он пропадает. Далее цикл работы второй ячейки проходит аналогично описанному выше циклу работы первой ячейки. При этом интегратор будет включен с дросселем 7, онределяющим постоянную времени интегратора по второму каналу управления. В результате действий оптимизатора У выходит на экстремум но каждому из каналов управления. Предмет изобретения Пневматический двухканальный оптимизаор, содержащий интегратор, выполненный в виде сумматора и емкости, основной суммаор, один вход которого соединен с выходом нтегратора, узел плавающей системы отсчеа, вход которого соедипен с входным канаом устройства, а выходы - с плюсовой и минуовой камерами сумматора интегратора, блок
управления, выполненный в виде ооегающего устройства и двух ячеек, каждая из которых состоит из трех пневматических мембранных релейных элементов, управляющие камеры которых подключены к выходам обегающего устройства, а сопловые камеры соединены со вторым входом основного сумматора и через дроссель-с задатчиком, сопла двух элементов каждой ячейки соединены через регулируемые дроссели и сопла третьих элементов ячеек непосредственно соединены с атмосферой, и два узла управления исполнительными механизмами.
о т л и ч а ю uj, и п с я тем, что, с целью повышения Г1аде :;11ости работы устройства, интегратор содержит два регулируемых дросселя, а вторые сопловые камеры релейных элементов через сопла последовательно соединены между собой, вторые сопла первых реле ячеек подключены к выходу сумматора интегратора, а вторые сопловые камеры третьих реле обеих ячеек соединены соответственно с входами первого и второго регулируемых дросселей интегратора, выходы которых соединены с емкостью и со входом основного сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНЫЙ ПНЕВМАТИЧЕСКНЙ ОНТИМИЗАТОР С ПЛАВАЮЩЕЙ СИСТЕМОЙ ОТСЧЕТА | 1970 |
|
SU264023A1 |
| Пневматический двухканальный оптимизатор | 1974 |
|
SU526858A1 |
| Пневматическое обегающее устройство | 1979 |
|
SU842763A1 |
| ПНЕВМАТИЧЕСКИЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР С ПЛАВАЮЩЕЙ СИСТЕМОЙ ОТСЧЕТА | 1968 |
|
SU217496A1 |
| Пробоотборник | 1981 |
|
SU987447A2 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Пневматический генератор | 1984 |
|
SU1234671A2 |
| АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР ДЛЯ УПРАВЛЕНИЯ СЕПАРАТОРОМ | 1970 |
|
SU282046A1 |
| УСТРОЙСТВО для ПРИЕМА ПНЕВМАТИЧЕСКИХ СИГНАЛОВ | 1973 |
|
SU364930A1 |
| Устройство для автоматического регулирования вязкости шоколадной массы | 1981 |
|
SU1084731A1 |