Известные индикаторы систем контроля тараметров, содержащие одну или несколько шкал и измерительные каиалы по числу индицируемых параметров, каждый из (Которых содержит задающий и компенсирующий датчики, включенные по дифференциальной схеме, .подключенный к ним через развязывающий трансформатор усилитель сигнала рассогласования датчиков, -серводвигатель -с редуктором, ленточную барабанную передачу, указатель, выпол-ненный в виде границы нанесенных на мягкой ленте двух различного цвета полей, и направляющие ролики, не .позволяют получать одновременно индивидуальную и интегральную оценки значений индицируемых параметров.
Предлагаемое устройство отличается от известных тем, что оно снабжено дифференциала1ми, образующими несколько ступеней, при этом выходные оси редукторов попарно или ступенями подсоединены через зубчатые пары к соответствующим ;солнечным колесам дифференциалов первой ступени, выходные с Ммирующие оси которых образуют пары, подсоединенные посредством шестеренчатых передач -к соответствующим солнечным колесам дифференциалов последующей ступени, а выходная суммирующая ось дифференциала последней ступени через шестерни подсоединена к винту винтовой пары, гайка которой.
перемещаясь вдоль винта и шкалы индикатора, жестко связана с индексом интегральных значений, выполненным в форме жесткой рамкн, охватывающей шкалу и указатели,
причем отношение передаточного числа от каждого двигателя к индексу интегральных значений к передаточному числу от каждого двигателя к профилю индивидуальной оценки соответствует числу «л индицируемых параметроБ, а общее число диффере1щиалоз равно «п--1.
TaiKoe выполнение устройства обеспечивает получение одновременно индивидуальной и интегральной оценки значений индицируемых
параметров.
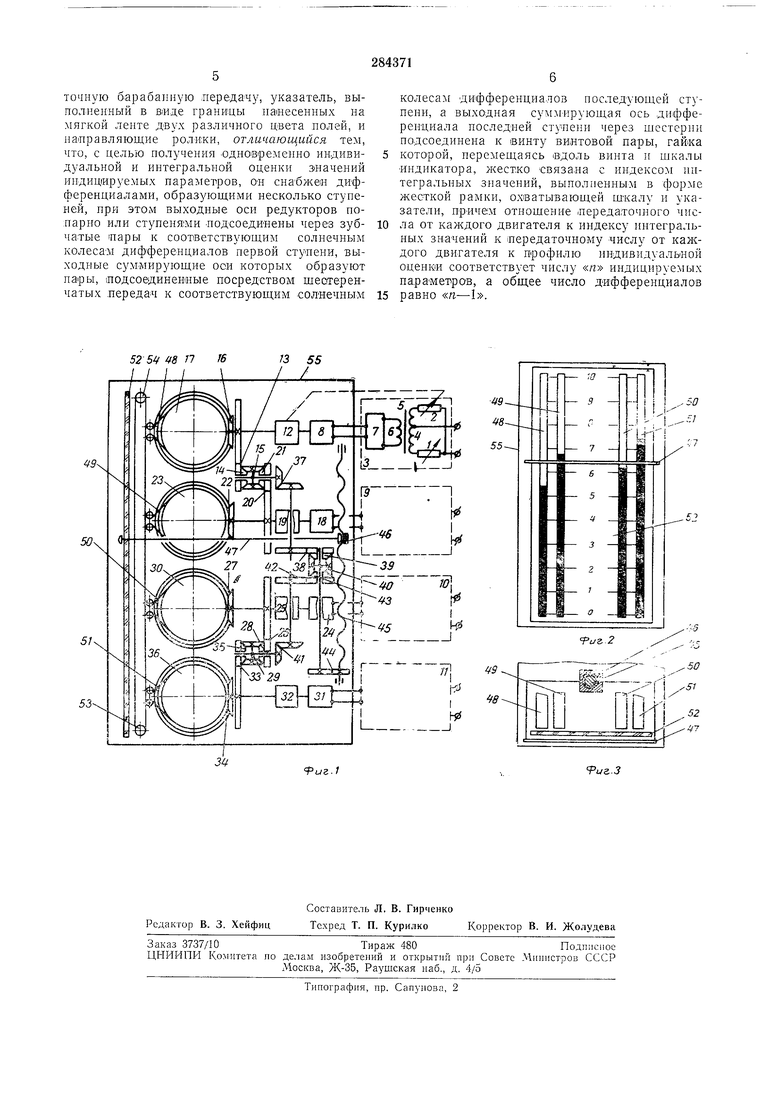
На фиг. 1 представлена электрокинематическая схема предлагаемого индикатора для измерения четырех параметров; на фиг. 2 - вид лицевой части индикатора с отдельными
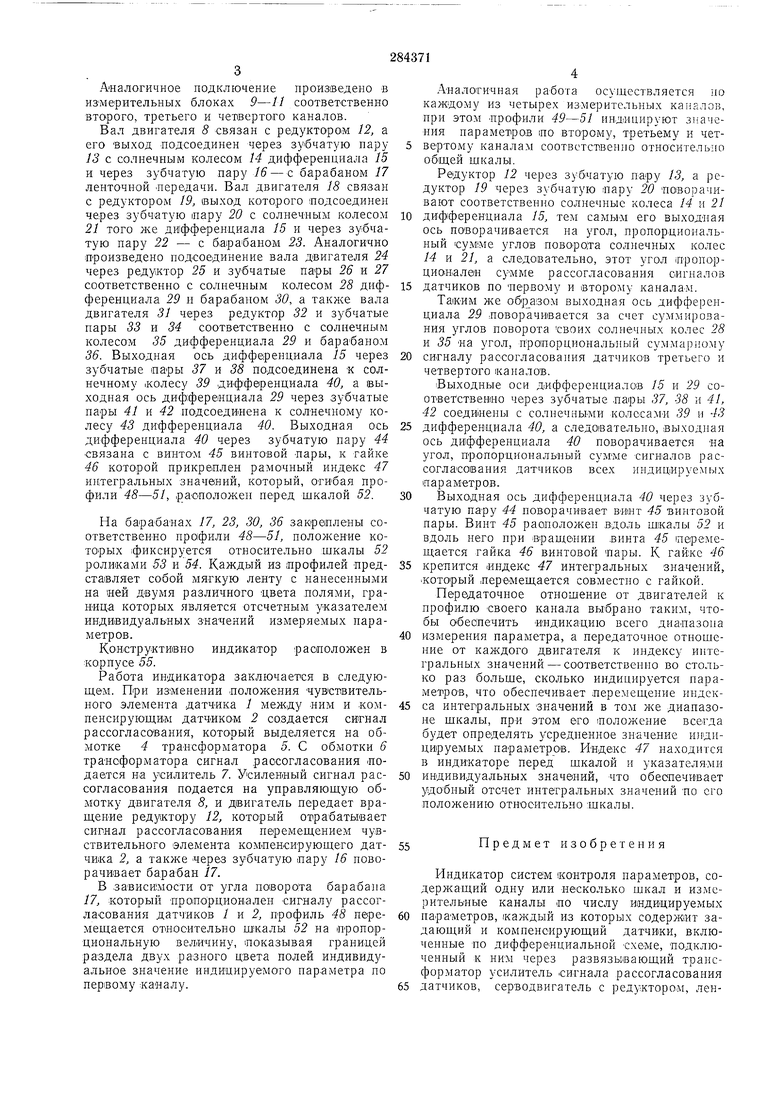
указателями и и.ндексом интегральной оцеНКН; на фиг. 3 - конструкция индекса интегральной оценки и его размещение в индикаторе в поперечном сечении шкалы индикатора.
Задающий датчик / и компенсирующий
датчик 2 измерительного блока 3 первого канала подключены по дифференциальной схеме к обмотке 4 трансформатора 5. Обмотка 6 этого трансформатора подключена к входным клеммам усилителя 7, а его выход подключен
Аналогичное подключение произведено в измерительных блоках 9-// соответственно второго, третьего и четвертого каналов.
Вал двигателя 8 связан с редуктором 12, а его ВЫХОД нодсоединен через зубчатую пару 13 с солнечным колесом 14 дифференциала 15 и через зубчатую нару 16-с барабаном 17 ленточной Передачи. Вал двигателя 18 связан с редуктором 19, выход которого подсоединен через зубчатую лару 20 с солнечным колесом 21 того ди1фференциала 15 и через зубчатую нару 22 - с барабаном 23. Аналогично произведено нодсоединение вала двигателя 24 через редуктор 25 и зубчатые нары 26 и 27 соответственно с солнечным колесом 28 дифференциала 29 и барабаном 30, а также вала двигателя 31 через редуктор 32 и зубчатые пары 33 и 34 соответственно с солнечным колесом 35 дифференциала 29 и барабаном 36. Выходная ось дифференциала 15 через зубчатые оары 37 и 58 подсоединена к солнечному (Колесу 39 диф ференциала 40, а выходная ось дифференциала 29 через зубчатые нары 41 и 42 иодсоединена к солнечному колесу 43 дифференциала 40. Выходная ось дифференциала 40 через зубчатую пару 44 связана с винтОМ 45 винтовой лары, к гайке 46 которой прикреплен рамочный индекс 47 интегральных значений, который, огибая профили 48-51, расположен перед шкалой 52.
На бараба-нах 17, 23, 30, 36 закреплены соответственно профили 48-51, положение которых |фиксируется относительно шкалы 52 роликами 53 и 54. Каждый из .профилей представляет собой мягкую ленту с нанесенными на ней двумя различного цвета полями, граница которых является отсчетным указателем индивидуальных значений измеряемых параметров.
Конструктивно индикатор расположен в корпусе 55.
Работа индикатора заключается в следующем. При изменении положения чувст1вительного элемента датчика 1 между ним и .компенсирующим датчиком 2 создается сигнал рассогласования, который выделяется на обмотке 4 трансформатора 5. С обмотки 6 трансформатора сигнал рассогласования подается на усилитель 7. Усиленный сигнал рассогласования подается на управляющую обмотку двигателя 8, и двигатель передает вращение редуктору 12, который отрабатывает сигнал рассогласования перемещением чувствительного элемента компенсирующего датчика 2, а также через зубчатую пару 16 поворачивает барабан 17.
В .зависи1мости от угла поворота барабана 17, который нрояорционален сигналу рассогласования датчиков I i 2, профиль 48 перемещается относительно шакалы 52 на пропорциональную величину, показывая границей раздела двух разного цвета полей индивидуальное значение индицируемого иар аметра по первому каналу.
Аналогичная работа осуществляется по каждому из четырех измерительных каналов, при этом профили 49-51 индицируют значения параметров по второму, третьему и четвертому каналам соответственно относнгелыю общей щкалы.
Редуктор 12 через зубчатую пару 13, а редуктор 19 через зубчатую пару 20 поворачивают соответственно солнечные колеса 14 и 21
диф|ференциала 15, тем самым его выходная ось поворачивается на угол, пропорциональный углов поворогга солнечных колес 14 и 21, а следовательно, этот угол пропорционален сумме рассогласования сигналов
датчиков по первому и второму каналам.
Таким же обр а13ом выходная ось дифференциала 29 поворачивается за счет суммирования углов поворота своих солнечных колес 28 и 35 на угол, пропорциональный суммарному
сигналу рассогласования датчиков третьего и четвертого каналов.
Выходные оси дифференциалов 15 и 29 соответственно через зубчатые пары 37, 38 и 41, 42 соединены с солнечнЫМИ колесами 39 и 43
дифференциала 40, а следовательно, выходная ось дифференциала 40 поворачивается на угол, пропорциональный сумме сигналов рассогласования датчиков всех индицируемых параметров.
Выходная ось дифференциала 40 через зубчатую пару 44 поворачивает винт 45 винтовой пары. Винт 45 расположен вдоль шкалы 52 и вдоль него при вращении винта 45 1перемещается гайка 46 винтовой пары. К гайке 46
крепится индекс 47 интегральных значений, «который перемещается совместно с гайкой.
Передаточное отношение от двигателей к профилю своего канала выбрано таким, чтобы обеспечить индикацию всего диапазона
измерения параметра, а передаточное отношение от каждого двигателя к индексу интегральных значений - соответственно во столько раз больше, сколько индицируется параметров, что обеспечивает перемещение индекса интегральных значений в том же диапазоне щкалы, при этом его лоложение всегда будет определять усредненное значение индицируемых параметров. Индекс 47 находится в индикаторе перед шкалой и указателями
индивидуальных значений, что обеспечивает удобный отсчет интегральных значений по его положению относительно шкалы.
Предмет изобретения
55
Индикатор систем контроля параметров, содерл ащий одну или несколько шкал и измерительные каналы по числу индицируемых
параметров, каждый из которых содерЖ1Ит задающий и компенсирующий датчики, включенные но дифференциальной схеме, подключенный к ним через развязывающий трансформатор усилитель сигнала рассогласования
точную о арабапную .передачу, указатель, выполненный в виде границы нанесенных на мягкой ленте двух различного цвета нолей, и направляющие ролики, отличающийся тем, что, с целью ЦОлучения одцов1ременно индивидуальной и интегральной оценки значений индицируемых параметров, он снабжан дифференциалами, образующими несколько стуненей, при этом выходные оси редукторов поларно или ступеня ми нодсоедииены через зубчатые 1пары к соответствующим солнечным колесам дифференциалов цервой ступени, выходные суммирующие оси которых образуют нары, шодсоединениые посредством щестеренчатых передач к соответствующим солнечным
колесам дифференциалов последующей ступени, а выходная суммирующая ось дифференциала последней ступени через щестерни подсоединена к винту винтовой пары, гайка которой, перемещаясь вдоль винта и шкалы иидикатора, жестко связана с индексом пптегральных значений, выполненным в форме жесткой рамки, охватывающей щкалу и указатели, причем отнощение передаточного числа от каждого двигателя к индексу интегральных значений к передаточному числу от каждого двигателя к профилю индивидуальной оценки соответствует числу «л индицируемых параметров, а общее число дифференциалов равно «п-I.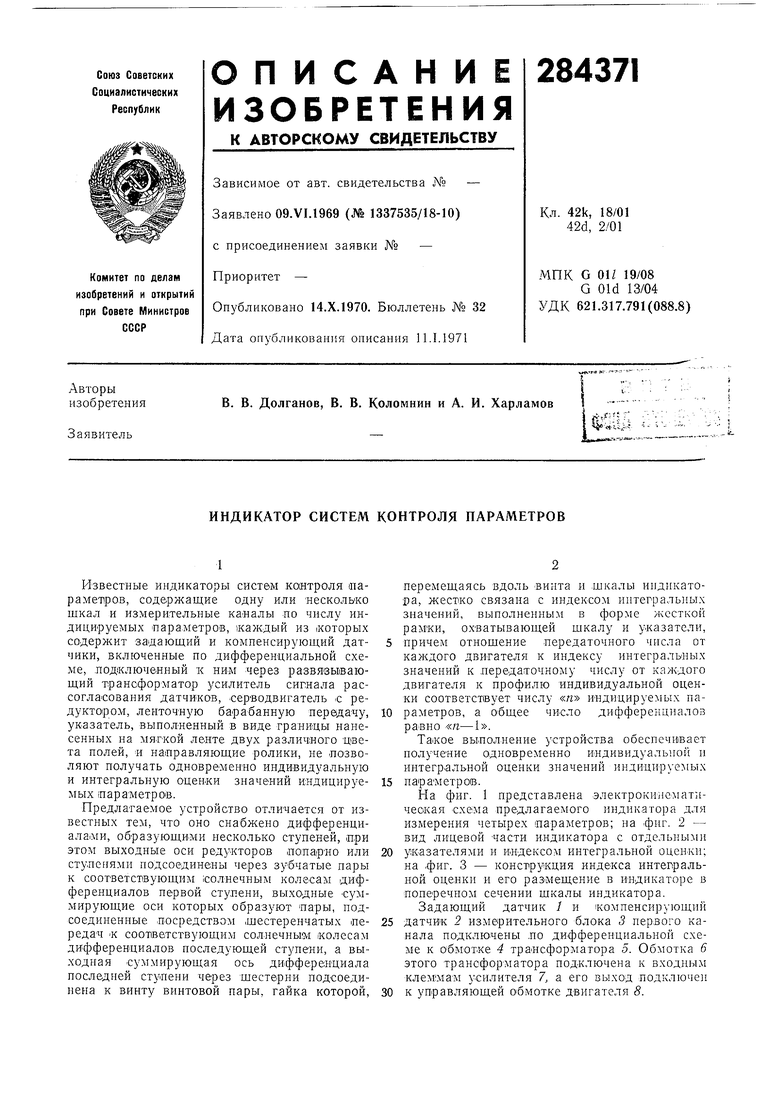
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДИКАТОР ИДЕНТИЧНЫХ ПАРАМЕТРОВ | 1971 |
|
SU305377A1 |
| Гидромеханическая многоконтурнаяпЕРЕдАчА ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU839755A1 |
| Привод барабанных летучих ножниц | 1973 |
|
SU524687A1 |
| АКТИВНАЯ ТРАНСМИССИЯ, КОРОБКА ПРЯМОГО ВКЛЮЧЕНИЯ (МЕХАНИЧЕСКАЯ), КОРОБКА СКОРОСТЕЙ С ПЛАНЕТАРНЫМ ФРИКЦИОНОМ И НЕЗАВИСИМОЙ ЗАДНЕЙ ПЕРЕДАЧЕЙ, РАЗДАТОЧНАЯ КОРОБКА С МЕХАНИЗМОМ РАСПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА ОСЯМИ (КОЛЕСАМИ) | 2004 |
|
RU2292270C2 |
| Двухпоточная трансмиссия | 2019 |
|
RU2705371C1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
| Трансмиссия транспортного средства с конической главной передачей и межколесным дифференциалом /ее варианты/ | 1983 |
|
SU1252198A1 |
| ГИБРИДНЫЙ МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2017 |
|
RU2658486C1 |
| ЛЕБЕДКА ДЛЯ ВОЗДУШНОЙ ТРЕЛЕВКИ ЛЕСА | 1967 |
|
SU195079A1 |
| Механизм распределения мощности в трансмиссии транспортного средства | 2022 |
|
RU2789152C1 |