Изобретение может найти широкое применение при манипуляции предметов на расстоянии в трудных условиях применения, например в глубоком вакууме, в радиоактивной или коррозионной среде, при высоком давлении и т. д.
Известные хоботы манипуляторов, состоящие из подвижно связанных между собой аналогичных звеньев, не могут быть использованы Б труднодоступных местах.
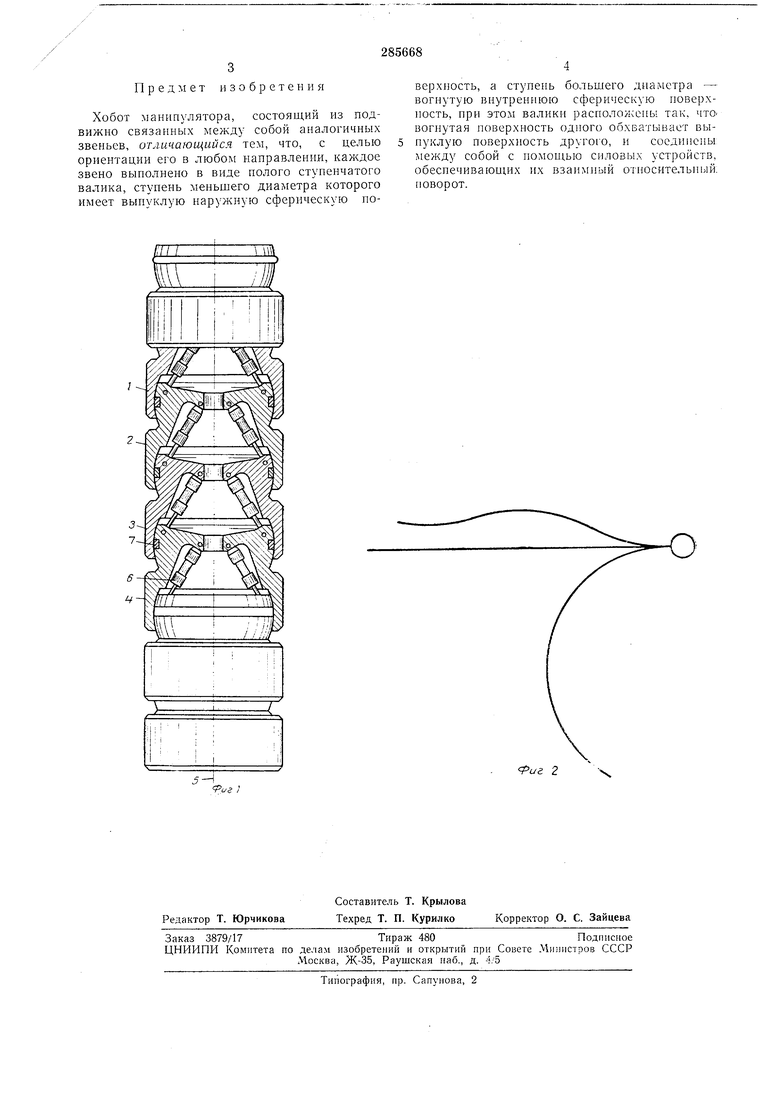
Цель изобретения - создать такой хобот манипулятора, который имел бы возможность ориентации в любом направлении.
Это достигается тем, что каждое звено выполнено в виде полого ступенчатого валика, ступень меньшего диаметра которого имеет выпуклую наружную сферическую поверхность, а ступень большего диаметра - вогнутую внутреннюю сферическую поверхность. При этом валики расположены так, что вогнутая поверхность одного обхватывает выпуклую поверхность другого, и соединены между собой с помоидью силовых устройств, обеспечивающих их взаимный относительный поворот.
Хобот содержит связанные последовательно идентичные звенья /, 2, 3, 4, расположенные по центральной оси 5, когда плечо не имеет никакого изгиба. Каждое звено нредставляет собой полый ступенчатый валик, ступень меньшего диаметра которого имеет выпуклую наружную сферическую поверхность, а ступень большего диаметра - вогнутую внзтреннюю сферическую поверхность. Звенья
установлены последовательно таким образом, что вогнутая поверхность одного обхватывает с небольшим зазором выпуклую поверхность другого. При этом диаметр выпуклой части звена выполнен несколько меньше диаметра
его вогнутой части.
Собранные таким образо.м звенья могут поворачиваться одно относительно другого вокруг центров, общих для обхватываюшей и
обхватываемой частей двух сменных элементов. Поворот звеньев осуществляется с помощью силовых устройств, соединяющих звенья, например электрических, пневматичеческих или гидравлических цилиндров 6, расположенных на равном расстоянии по обе стороны от оси. На обхватываемой части каждого звена установлено уплотнение 7, контактирующее с обхватывающей частью соседнего звена, чтобы изолировать внутреннюю часть
П р е д i е т изобретения
Хобот манипулятора, состоящий из подвижно связанных между собой аналогичных звеньев, отличающийся тем, что, с целью ориентации его в любом направлении, каждое звено выполнено в виде полого ступенчатого валика, ступень меньшего диаметра которого имеет выпуклую наружную сферическую поверхность, а ступень оольшего диаметра - вогнутую внутреннюю сферическую поверхность, нри этом валики расположепы так, что вогнутая поверхность одного обхватывает выпуклую поверхность другого, и соединены между собой с помощью силовых устройств, обеспечивающих их взаимный относительный, поворот.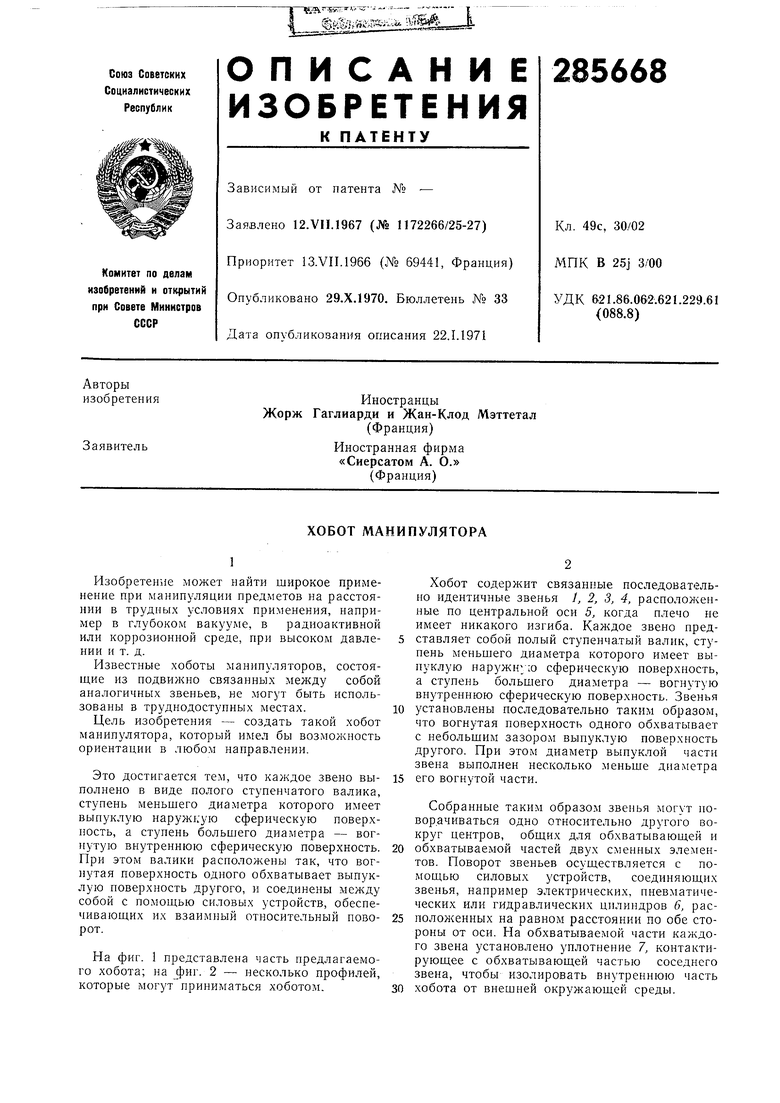
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 2019 |
|
RU2716293C1 |
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
| Хобот манипулятора | 1979 |
|
SU870107A1 |
| ШАРНИР МАНИПУЛЯТОРА | 2005 |
|
RU2283217C1 |
| УНИВЕРСАЛЬНЫЙ МАНИПУЛЯТОР (ВАРИАНТЫ) | 2012 |
|
RU2527559C2 |
| ШЕСТЕРЕНЧАТЫЙ НАСОС С ВНУТРЕННИМ ЗАЦЕПЛЕНИЕМ | 1973 |
|
SU374859A1 |
| Хобот манипулятора | 1990 |
|
SU1710333A1 |
| ШАРНИР МАНИПУЛЯТОРА (ВАРИАНТЫ) | 2005 |
|
RU2284896C1 |
| ЦЕПЬ ПРИВОДНАЯ ПЛАСТИНЧАТАЯ, ИМЕЮЩАЯ ОТКРЫТЫЕ ШАРНИРЫ КАЧЕНИЯ С ЦИЛИНДРИЧЕСКОЙ ФОРМОЙ ЭЛЕМЕНТА ЗАЦЕПЛЕНИЯ | 2009 |
|
RU2472049C2 |
| ДВУХТАКТНЫЙ БЕСШАТУННЫЙ МОДУЛЬНЫЙ ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С СИЛОВЫМ МЕХАНИЗМОМ ЭКСЦЕНТРИКОВОГО ТИПА | 2002 |
|
RU2215884C1 |
5-Н
fue 1
иг 2
